水下状态潜艇的静力学特性及其对操纵运动的影响
2020-11-27 06:47施生达吕帮俊彭利坤徐雪峰
舰船科学技术 2020年5期
施生达,吕帮俊,彭利坤,徐雪峰
(1. 海军工程大学 舰船与海洋学院,湖北 武汉 430033;2. 海军工程大学 动力工程学院,湖北 武汉 430033;3. 中国船舶重工集团公司第七○七研究所九江分部,江西 九江 332007)
0 引 言
现代快速、深潜潜艇,在危及潜艇水下操纵安全的诸多事故中,引人特别关注的两类主要事故[1-2],也是潜艇操纵性设计中,按惯例进行安全性确认需要考核的2种情况[3]:一是高速航行时发生尾升降舵卡(或误操)下潜大舵角;二是低速航行时发生舱室(大量)进水。尤其当潜艇处于大深度航行状态,将出现更加紧迫的危急情况。
上述情形,早在20世纪70年代研制SSN 688级潜艇时,美国海军就采用了1/12缩尺自船模,通过应急机动试验进行了评估[4-5]。
文献[6]把操纵事故的危害分为2类:
1)主要事故危害。可能引起潜艇失事;或引起艇上多各艇员严重受伤或死亡;或对人命、财产或潜艇外部环境的严重威胁。
2)对个体的局部危害。可能引起艇上个别艇员死亡、重伤或轻伤。在安全要求上,对二者采取没策略来减轻事故的危害,具体说来分别为前者采取“自上而下”地控制主要事故的危害,后者应用“自下而上”地保障岗位健康与安全。
文献[2]指出:所有潜艇都涉及安全性问题,尤其是处于潜水状态时。设计者和操纵者,对潜艇发生升降或舵室进水事故时,都必须清楚下列基本状况:
1)发生了类似主要事故后,潜艇的操纵运动特性是怎样变化的?
2)要明确最有效的恢复性挽回操纵方法(操纵顺序与方法)。
3)通过对潜艇挽回操纵运动特性,与潜艇的潜深和空间姿态安全性要求的比较,确定和平时期巡航时的深度、航速的安全范围(H0/V0)。
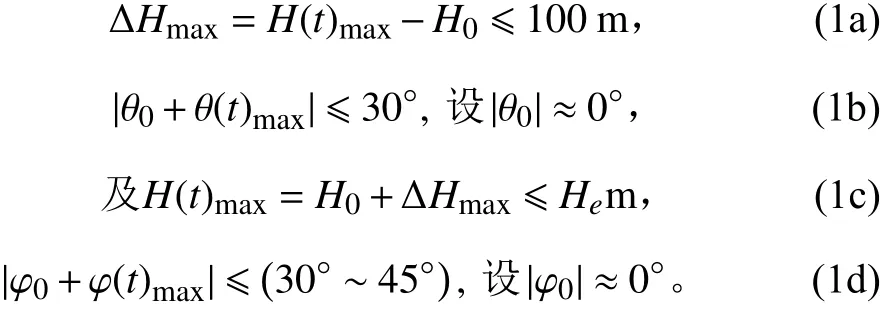
文献[2]提出的安全性要求是:对上述主要事故经恢复性挽回操纵后,潜艇的潜深和纵、横倾都应同时保持在下列范围内,并促使潜艇的初始航行深度H0(及航速V0)按有关规则进行安全性选择。
对于经过潜艇均衡和按条例补充均衡的水下巡航潜艇,一般是以潜艇运动的航向与深度为基准,处于等速定深直航状态,其操纵运动特性主要决定于潜艇垂直面运动稳定性的品质、升降舵的操纵能力、艇体水动力的对称性程度(关于垂直面的)。这些特性是潜艇操纵性设计阶段必需考核的重点指标。就潜艇水下航行状态,关注的控制潜艇操纵运动最主要的参数是潜深H,影响潜深的直接可控因素为航速V、纵倾角 θ和升降舵角 δb,δs(操纵力),即 H=f(V,θ,δb,δs)。
在文献[6]中,英国对战略核潜艇的安全功能要求区分为“基本安全功能及更高顶层的”关键安全功能。该功能由六大关键安全功能组成,第1项即是潜艇操纵,第6项是控制火灾危害。为了保证潜艇操纵基本功能,需预防的的操艇事故是碰撞、搁浅和因舵室进水或操纵性失控造成的潜艇“超深”。因此必须保持潜艇结构的完整性(水密性与气密性)、控制艇的浮力与重量、保持潜艇静稳性等基本功能,以及完整的推进动力,是对潜艇操纵的直接保证。
由上文可知,升降舵卡与舱室进水事故,是常见的两类水下操纵安全性问题。本文概括介绍潜艇水下操纵的两类主要事故由来与危害及应急操纵的基本概念,论述水下状态潜艇的流体静力学特性与升降舵的动力学特性,以及它们对潜艇运动与应急挽回操纵的影响,揭示潜艇水下运动过程中纵倾与深度易不稳定的力学上的根本原因。
1 潜艇应急操纵的含义与特点
舰艇操纵大致可分为两类:控制舰艇运动的操纵与使舰艇静止(系泊)的操纵。这里只讨论控制潜艇运动状态的应急操纵。
水面舰船的应急操纵性是指舰船应付紧急情况的操纵性能[7]。常用的应急操纵包括全速满舵旋回和应急全速倒车制动的停船操纵,用于防御突然来袭的兵器、兵力或规避碰撞、搁浅等紧迫局面的应急操纵。
潜艇的应急操纵是指突然发生的失去对潜艇航向、纵倾、深度的操纵事故的统称。一般是指危险纵倾、舵卡和舱室进水的应急挽回操纵,通常还包括火警,但灭火救灾斗争与舵卡、进水事故的动力抗沉斗争,在具体操作上有显著区别,本文只涉及动力抗沉问题。
尾舵卡、舱室进水事故的动力抗沉具有2个显著特点[8]:
1)时间上突然发生,空间上事故运动幅度大,变化快;
2)危害极其严重,涉及潜艇的存亡。
航海实践表明,在应急操纵工况下,受力不易确定,多种外力影响下的舰艇运动响应也是较复杂而紧迫的,而控制潜艇运动的手段和能力是有一定限度的。一般把应急操纵归属潜艇大机动及特殊工况下操纵运动研究,是潜艇操纵性研究的难点和热点,受到广泛特别关注。
2 潜艇静力学与操纵动力学特性
核潜艇出现之前,潜艇工程师和艇员关注的操纵问题主要是:潜艇的操纵控制装置是否能够满足潜艇在垂直面内运动控制的使用要求(特别是在近水面的潜望深度),即可能存在深度(纵倾)控制的操纵能力不足的问题。
但是,在核潜艇为代表的现代潜艇问世之后,关注的重点发生了根本的变化,除了上述潜艇机动性操控的基本要求外,还必须实现潜艇在垂直面内的深度机动性和运动稳定性之间的平衡。高速大舵角的深度机动会形成几十度纵倾和很快的大幅度深度变化,出现了潜艇的纵倾角/深度操纵随航速变化( H/θ~V)的巨大风险。因此,在潜艇深度变化及保持深度与潜艇航向变化及保持航向之间,将更多地关注潜艇的深度变化和保持深度问题。而现代潜艇操纵的上述特征是由静力学与操纵动力学特性决定的。
2.1 水下状态潜艇的流体静力学特性
水下状态的潜艇有2个突出的流体静力学特性:
1)潜艇水下储备浮力为0
潜艇设计水线以上所有水密容积,包括水密艇体和附体的容积等提供的浮力,称为储备浮力,用Vrb表示,单位是m3,并与主压载水舱里水的容积相等,是潜艇正常下潜条件之一,在较早的潜艇时代,用来衡量潜艇在风浪中安全航行的能力,并表示水面抗沉和水下自浮能力的好坏。对于单壳体潜艇约为10%~20%∇ ↑ ( 注 ∇ ↑为潜艇水下排水量,m3),双壳体潜艇为25%~30%∇ ↑。但是,水下状态的潜艇之储备浮力为0,潜艇依靠浮力直接支撑平衡艇的重量,要求潜艇处于“中和浮力状态”或“零浮力状态”,即潜艇的浮力和艇的重量相等。为此,艇上设置了多种保障系统、装置及设备,如浮力调整系统及其包含的浮力调整水舱、疏水泵、舱底泵等,纵倾平衡系统及其包含的纵倾平衡水舱、中压气管路、四通操纵旋塞等。
潜艇为什么要设计成中和(或零)浮力状态?
如果潜艇的重量大于浮力或小于浮力,为了保持潜艇的深度,就必须要求潜艇维持一定航速,提供一定动升力,实现对潜艇深度的控制。但是,军用潜艇的战术使用则要求潜艇能在水下悬停或以很低的航速(如2~3 kn)航行的要求。潜艇与飞机不同,潜艇正常情况下是不依靠向前运动产生的动升力来支撑潜艇的重量。
潜艇的技术与战术特点要求其具有低速运行,此时艇体和舵的水动力,对潜艇存在的由艇的实际重量与浮力造成的浮力差、力矩差(或称剩余浮力及其力矩)的平衡能力是很低的。所以,潜艇必须处于中和浮力状态。
零储备浮力状态,决定了水下潜艇对于浮力和重量这两者的变化都很敏感,容易出现“掉深”,甚至深度失控,尤其是低速的经航工况航行时,潜深波动大,监控不当容易形成下潜惯性。
2)水下状态潜艇的静稳性力矩小
潜艇水下状态的平衡稳定是与水面舰船完全不同的流体静力学状态。此时潜艇的稳性条件变为艇的重心G必须位于浮心C之下(见图1)。因为水线面面积的消失,潜艇的纵横稳定中心M,m与浮心C等三心重合了。因此,水下状态潜艇的纵稳性与横稳性基本相等,其纵倾1°扶正力矩M与横倾1°扶正力矩相等,或表示成:


图 1 处于水面和水下状态的潜艇横稳性Fig. 1 Transverse stability of submarine in surface and submerged states
对于现代潜艇约为10~25t ·m/(°),与水上状态纵倾1°的扶正力矩相比差别极大。如苏联的33型潜艇,水上排水量1 319.36 t,其水上状态约为1 940 t ·m/(°) , 而水下状态仅为5.4t ·m/(°)。
所以,水下状态中高速工况发生尾升降舵卡或低速舱室大量进水事故时,产生大的纵倾力矩,就容易出现纵倾失控,形成几十度危险纵倾;反过来,当突发大纵倾时,必然有很大的纵倾力矩克服了相应的扶正力矩,这个纵倾力矩来自何处呢?通常情况下主要由舱室进水产生,或由升降舵角产生的。
2.2 潜艇尾升降舵的流体动力学特性
1)各种航速舵角下的首舵卡,均可用尾舵保持操控
首升降舵位于指挥室围壳上或艇体首部,与尾升降舵相比,更临近潜艇的垂直面水动力作用中心,在具有相同舵力系数和舵角下,首舵产生潜艇纵倾和垂向速度的能力大约是尾升降舵的1/3[2],甚至数倍之差。因此,各种工况下的首舵卡,正确操纵尾升降舵都可抑制其影响(见图2)。
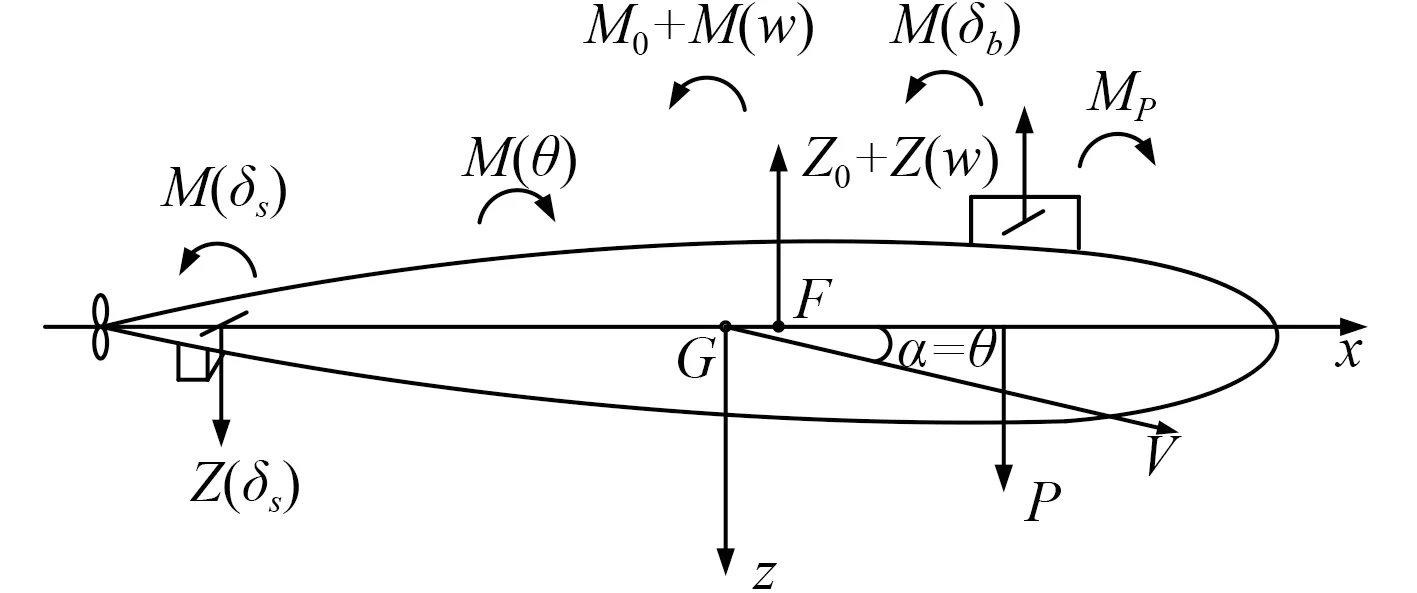
图 2 有纵倾等速定深运动Fig. 2 Keeping depth in a constant velocity with a trim
2)根据潜艇操纵性理论,潜艇的变深机动可近似看成定常潜浮运动
该运动具有下列特性[2]:
一定航速时操纵尾升降产生纵倾角的能力为
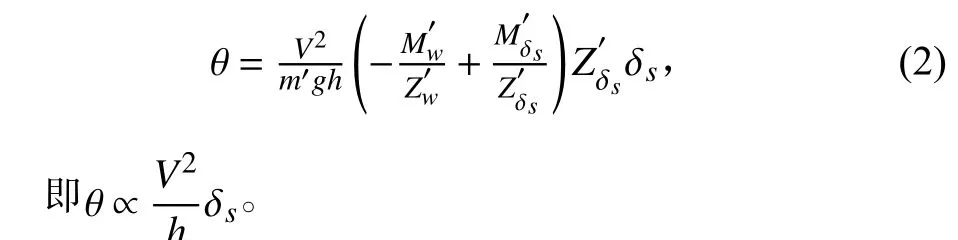
一定航速时操纵尾升降舵产生垂向速度的能力为

操升降舵产生的深度变化可表示成为

可见,当高速大舵角时,潜艇的纵倾和潜深改变迅速,易使潜艇纵向失稳或深度失控。潜艇操纵性设计上,通常尾升降舵面积是按军用标准所规定航速时单位舵角产生一定垂向升速率的能力来决定的,如文献[2]是用所谓“平均航速”设计的,相关资料表明是指“航渡速度”,约为7 kn。我国是参照苏联/俄罗斯的有关文献规定的,取10 kn作为设计航速。
因此,当潜艇高速航行时,尾升降舵就显得过于“庞大”,满舵时存在很大的潜在风险,如升降舵舵角1°时,潜艇部分航速的水动力特性如表1所示(首舵系围壳舵)。

表 1 某艇不同航速时的升降舵水动力(矩)Tab. 1 Hydrodynamic force caused by a submarine elevators
尾升降舵面积,可通过选用较高设计航速来限制。但是,当发生舱室进水事故时,尾升降舵的高效操纵力,将有效的支持高压气吹除的挽回作用。为保证操艇安全,就出现了多种操纵性安全技术,如采用按航速高低对尾升降舵角的限用技术,在升降舵装置构型上采用了:左右舵舵时可分别操纵的分离舵(或称差动舵)(英)、大小舵(俄)或分片舵(美)等新颖尾舵装置,提高尾舵操纵的安全性和机动性能。
3 常见案例及事故原因分析
3.1 危险大纵倾
潜艇在执行巡逻任务中,大深度航行期间,艇的纵倾由无纵倾状态变成首倾至18°,深度增大近60 m,航速进行了减速操纵,仍接近中速工况;潜艇完好,没有发生进水,动力推进装置工作正常。试分析判断该艇事故状态。
混淆本例的因素有:在此前已进行了大约20 s应急操纵,如下令停车、排水、吹除中组抑制下潜惯性等,在此期间艇的潜深增大约10 m。分析的关键有两方面:
1)艇的首纵倾从何而来?什么原因使潜艇从尾纵倾变成大的首纵倾?如艇的水下纵倾1°扶正力矩则造成近20°首倾约需300 t ·m的首纵倾力矩。在没有进水情况下,由于海水密度的变化产生的浮力差,作用于浮心,其力矩差是不大的,显然只有尾升降舵误操了下潜满舵时,在较大航速下,才可能形成这样大的操纵能力。如果舱室进水了,将增加事故分析判断的复杂性。
2)潜艇深度增大是艇重了吗?还是另有原因?
当潜艇浮力减小、舱室进水或消声瓦与艇体压缩等都可能引起艇重掉深,但在本例状态下,艇体完好,艇体压缩产生的负浮力是不大的,下潜深度的迅速增加,显然是由于大的首纵倾,在较高航速推进下造成了潜艇的快速下潜,并形成了下潜惯性。
针对性应急挽回操纵的主要方式
1)立即检查尾升降舵的工作状态,并立刻调整,按需操纵,控制潜艇纵倾;
2)立即采用应急吹首且主压载水舱,操相对上浮艇或应急倒车,快速恢复纵倾;
3)应急吹除,直浮水面,注意潜艇姿态,控制深度;
4)对大深度状态的应急挽回操纵要有足够的力度,类似供气吹除初始状态时“要猛”、“要狠”。对已形成显著下潜惯性状态,要果断应急吹除上浮。
3.2 舱室进水
潜艇舱室破也进水类似于重力作用下容器壁面小孔出流,其出水速度可表示为:

则舱室进水流量Q用自由进水公式表示为:

式中:A为进水孔面积,m2;H为进水孔的压头,m。Cn为流量系数,取Cn=0.6~0.7,瑞典SSPA取0.7,水面状态取0.6。
如在100 m深度处,破口直径300 mm,面积A=0.07 m2,当取Cn为0.7时,进水量约为Q=2m3/s 。
又如在200 m深度处,破孔直径5 in,破孔面积A≈0.012 67 m2,取Cn=0.6时,进水量Q≈0.475 9 m3/s≈0.5 m3/s。
对于破孔直径100 mm情形,流量系数Cn=0.7时,深度100 m,200 m,300 m时的进水量Q如图3所示。

图 3 通过耐压船体直径100 mm的破损孔流入的水量Fig. 3 The amount of water flowing into the vessel through a 100mm diameter damaged hole in the pressurized hull
可以看出:
1)大深度发生潜艇进水事故,往往会造成大量进水。用于应急挽回的时间很短,只有几十秒钟。
2)对海水冷却管路破损,应立即关闭相应的截止舷侧阀。
3)发生进水事故后,要第一时间进行压载水舱吹除。有时,由于受岗位职能的影响,采用习惯性的均衡(排水、移水)方式来应急挽回无异于“杯水车薪”,但在潜艇状态受控后,且在小于安全深度以内时是有意义的。
4)当艉部舱室进水,将导致螺旋桨停车。由于艇速太低,艇的操控力小,易产生过大的尾纵倾(40°~50°),为此,在设计上可用增大尾部主压载水舱的容积来弥补。对于首部进水,当电力系统可用,应增速至最大,增加潜艇的可控性,控制艇的尾纵倾处于较理想状态,通常认为从大深度浮起时是20°~25°左右。
3.3 常见的事故原因
航海实践的经验教训表明,促使潜艇处于抗沉应急操纵险境的常见原因大致如下:
1)操纵失误及舵装置故障
如操纵人员把上浮舵在忙乱紧迫状态下误操为下潜大舵(满舵)角;或发生“跑舵”为下潜满舵;或剧烈地机动过程中,频繁操纵与大舵角变换等造成液压失灵、零部件/元器件、操舵装置故障。
2)通海管路破损进水
管路腐蚀、老化,加上长时间大潜深航行的高压作用,可能发生爆管现象。
3)频繁执行任务或远航巡逻返航途中,人员的警惕性较低,机械设备处于疲劳状态,也是造成紧迫操纵局面的又一种寻常原因。
4)操纵人员对危险航行状态缺少潜艇操纵模拟器上的操作演练,并缺乏对水下状态操纵性主要的基本流体静力学特征的认识及判断。
由多次应急挽回操纵过程可见,要总结好两方面经验教训:
5)对典型主要事故如尾舵卡、舱室进水、火警等要明确事故的基准状态,明确相应的挽回操纵的基本方式与操作顺序,建立操纵指南性规则。
4 结 语
水下航行状态潜艇的纵倾、深度与航向,是潜艇运动位置和姿态的主要参数,也是潜艇操纵运动的基本操控目标参数。中高速尾升降卡、低速舱室进水等主要事故,将迅速产生显著纵倾力矩、负浮力,很快造成大纵倾,造成潜深快速偏移,严重威胁潜艇的安全。
水下抗沉操纵的关键因素是时间、航速和抗沉操纵设备(如高压气系统等)等三要素,以实现安全应急上浮:
1)抗沉挽回时间以秒计,要做到及时发现、及时报告、及时判断和决策、及时执行、果断行动;
2)舱室进水时的抗沉操纵中航速的使用,主要决定于艇的纵倾角状态。原则上,尾纵倾时应增速,首纵倾时应减速。结合实际,酌情处理纵倾角度大小情形时的影响;
3)用好高压气,进行正确吹除,尤其当存在首尾端进水时,应首先吹除进水一端的主压载水舱,并控制艇的深度和纵倾与上浮状态。当纵倾接近90°时,横稳性迅速减少到0[1]。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
包装工程(2022年12期)2022-07-04
水上消防(2022年1期)2022-06-16
新视线·建筑与电力(2021年2期)2021-09-10
海洋开发与管理(2020年2期)2020-09-10
直升机技术(2020年2期)2020-06-16
船舶标准化工程师(2020年1期)2020-06-12
山东青年(2016年12期)2017-03-02
广东造船(2016年3期)2016-07-13
中国水运(2014年12期)2015-01-09