基于三维激光的路面裂缝智能识别准确性研究
2020-12-07 02:22孔海望吴迪孙杨勇张傲南
公路与汽运 2020年6期
孔海望, 吴迪, 孙杨勇, 张傲南
(1.广东省建筑科学研究院集团股份有限公司, 广东 广州 510500;2.广东建科交通工程质量检测中心有限公司,广东 广州 510500)
裂缝是评价路面质量的重要指标之一,是多数路面病害的早期表现形式,直接影响道路使用寿命和行车安全,及时掌握路面裂缝发展情况并进行科学管养,能有效避免裂缝进一步发展。目前多数路面裂缝检测采用二维路面检测系统,通过快速连续扫描获取二维灰度图像进行路面破损数据采集,扫描精度接近1 mm。二维图像分析技术不仅能实现快速检测,无需封闭交通,而且拍摄的照片能直观反映路面的平面特征,是裂缝、坑槽等病害的有效调查手段。但该系统采用带状照明灯作为激发光源,较易受路面油污、标线或轮胎痕迹、阴影、光照不均等因素干扰,也无法获取变形类病害的形变信息。目前基于二维灰度图像的智能识别技术还不能对现场随机采集的数据进行有效处理,大多仍釆用现场釆集、人工识别方式,效率低下。基于三维激光的路面裂缝智能识别技术利用三角位移和激光测距原理,可全断面扫描路面各点的高程信息,利用特定算法和深度学习原理从扫描到的路面纹理中智能识别路面病害。理论上,通过二维图像和三维数据相结合,可识别包括沉陷、拥包和坑槽等变形病害在内的所有病害。
1 三维智能路面检测系统
采用广东省建筑科学研究院引进美国WayLink公司技术并结合国内实际需求研发的三维智能路面检测系统识别路面裂缝。该系统包括道路表面成像系统、道路路权成像系统、路面平整度检测系统和车辙深度检测系统,硬件包括GPS接收机、距离测量仪、电源、加速度计和惯性测量单元。配置有高能量线激光成像系统和特制滤光片,具有三维数据收集与拼接及病害自动化识别分析功能,可在最高100 km/h速度下采集纵横向精度为1 mm、垂直向精度为0.5 mm的路面三维点云数据。横向4 m范围内平均分布4 000个像素点,主要用于路面破损、车辙、平整度、构造深度、路面磨耗、路面跳车等检测。
为了提高裂缝识别准确率,该系统采用基于递归神经网络的三维沥青路面全自动像素级裂纹检测方法CrackNet-R。该方法采用一种新的递归单元——门控递归多层感知器(GRMLP)更新内部存储器,与广泛使用的长短期存储器(LSTM)和门控递归单元(GRU)不同,GRMLP通过在选通单元处进行多层非线性变换,对输入和隐藏状态进行更深入的抽象(见图1)。CrackNet-R可实现序列生成和序列建模两相序列处理,其中:序列生成是在研究中特别开发的,以找到最有可能形成裂纹模式的最佳局部路径;序列建模预测输入序列为裂纹模式的及时概率。在序列建模方面,GRMLP仅在每个门处使用一个以上的非线性层,略优于LSTM和GRU。除序列处理外,还设置有一个输出层,用于基于序列预测的及时概率产生像素概率,该输出层可实现从序列级学习到像素级学习的过渡,这对像素级的精确性至关重要。

图1 GRMLP原理示意图
2 准确性分析方法
目前,图像识别领域暂无通用的对准确率进行定量描述的指标。为此,引用信息检索和统计学分类领域的准确率、召回率和F1值指标作为衡量裂缝识别准确性的指标。
对于裂缝识别算法,要求识别结果既准确又全面,准确率、召回率正是这样一组评价指标,其计算公式如下:
Pr=TP/(TP+FP)×100%
(1)
Re=TP/(TP+FN)×100%
(2)
式中:Pr为准确率(Precision);TP为正确检测出来的目标物数目(True Positive);FP为不是目标物却检测为目标物的数目(False Positive);Re为召回率(Recall);FN为是目标物却没有检测出来的数目(False Negative)。
对于道路裂缝识别算法,令集合Γ1为识别算法的检测结果,集合Γ2为实际正确识别出的结果,Γ3为算法正确识别出的裂缝像素集合,Γ3=Γ1∩Γ2,则有:
TP=Γ3的裂缝像素数目
TP+FP=Γ1的裂缝像素数目
TP+FN=Γ2的裂缝像素数目
Pr和Re越接近于100%越好,但很多情况下二者是矛盾的:准确率高,则很难检测出所有裂缝,即召回率降低;召回率高,即检测结果覆盖全面,识别到的裂缝像素多,则准确率降低。因此,需综合考虑准确率和召回率。常用的F1值是综合评价指标,它能总体评价识别算法的优劣,其值越高,算法越优。F1值的计算公式如下:
F1=2PrRe/(Pr+Re)×100%
(3)
在获得识别算法检测结果Γ1和手动标注的真实裂缝图像Γ2之后,首先对它们的裂缝像素进行统计,分别计算各自的裂缝像素数目(TP+FP和TP+FN);然后与Γ1和Γ2的裂缝像素进行对比,若像素(x,y)在Γ1和Γ2中均为裂缝,则该像素记为Γ3的裂缝像素,得到TP;最后计算Pr和Re。
3 准确率影响因素分析
基于三维激光的路面病害智能识别技术的准确率受检测车速、雨水、光照强度的影响,影响方式和程度目前无统一认识。选取广州市某工业区沥青路面为试验路段(该道路建成于2010年,有较多不同严重程度的纵横向裂缝和网裂),设计3种工况,研究以上因素对裂缝识别准确率的影响。三维系统测试前先进行人工检测,作为比对的真值。
3.1 车速的影响
数据采集速度受相机拍摄频率和数据传输速度限制,在保证同等数据质量的前提下,相机拍摄频率越高、数据传输速度越快,最大采集速度越高。
在阴天路面干燥条件下,分别以20、40、60、80、100 km/h车速进行检测,每级车速重复检测3次,取准确率和召回率各自的平均值作为检测值。检测结果见表1、图2、图3。

表1 不同检测车速下路面裂缝识别准确率

图2 路面裂缝识别准确率随检测车速的变化

图3 不同检测速度下的自动分析效果
从表1、图2、图3可看出:检测车速越小,路面裂缝识别准确率越高;车速在80 km/h以下时准确率高于90%且较稳定,能满足规范要求;车速为100 km/h时准确率为87.8%,基本能满足日常巡查要求。实际道路检测中,80 km/h采集速度能满足准确率和工效的要求。
3.2 雨水的影响
降雨过后会在道路表面形成一层水膜,激光在表面发生镜面反射而形成噪点。因此,路面潮湿程度直接影响激光的反射效果,从而影响三维激光路面病害识别准确率。雨后路面潮湿程度在车流作用下会随时间逐渐降低,路面潮湿程度可通过基面湿度计测量。
为研究路面潮湿程度对裂缝识别准确率的影响,分别在雨后30、60、90、120、180 min对同路段进行裂缝检测(车速60 km/h),并记录当时的路面湿度,取5个区域同时段的平均值作为测试值。检测结果见表2、图4。

表2 不同路面湿度下路面裂缝识别准确率
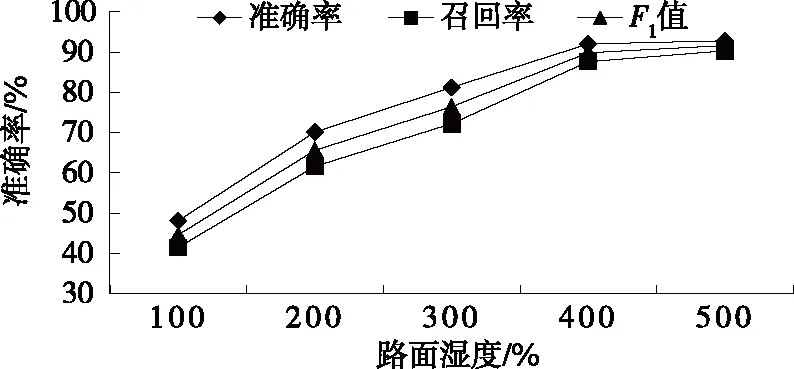
图4 路面裂缝识别准确率随路面潮湿程度的变化
从表2、图4可看出:大雨过后30 min内,湿度在30%左右,路面水膜明显,对激光采集系统造成强干扰,识别准确率极低;随着时间的推移,路面湿度降低,识别准确率不断提升,在120 min后路面湿度降至7.6%时准确率达到92.0%。因降雨后路面干净无污染,准确率高于60 km/h车速测试工况下的准确率。三维激光路面病害识别技术在路面湿度低于8%时基本能保证准确率在90%以上;路面湿度高于8%时,湿度越大,识别准确率越低,说明其对路面湿度极其敏感。
3.3 光照强度的影响
三维激光检测系统采用光源为波长800 nm的激光,可有效降低自然光的干扰。但太阳光波谱是连续的,仍含有少量该波段的光线,且阳光越强烈,该波段光照强度越大。因此,光照强度对采集数据的质量仍存在一定影响。
为研究光照强度对裂缝识别准确率的影响,分别在晴天的12点(300 000 lx)、14点(100 000 lx)、16点(60 000 lx)、18点(10 000 lx)、20点(2 500 lx)进行数据采集,检测车速为60 km/h,地面干燥无杂物。检测结果见表3、图5。
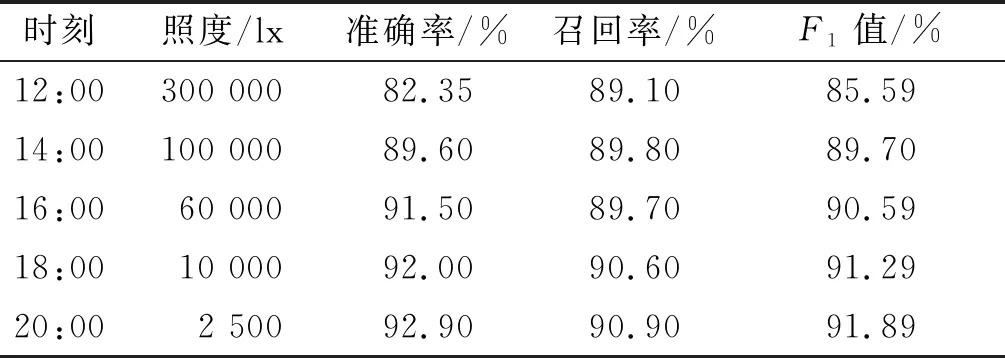
表3 不同光照强度下路面裂缝识别准确率
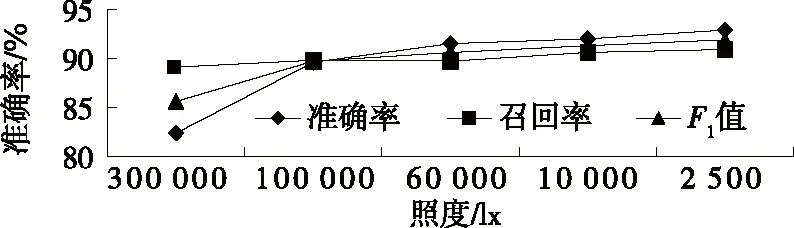
图5 路面裂缝识别准确率随光照强度的变化
从表3、图5可看出:照度在100 000 lx以上时,路面裂缝识别准确率随照度降低明显增强,F1值敏感性次之,召回率基本不随照度改变而改变;照度在100 000 lx以下时,准确率、召回率和F1值均基本稳定在90%以上。准确率受光照强度影响较大主要是因为光照强度越大,光噪点越多,误判比例越高。而漏判基本不受影响。因此,为保证识别准确率,应尽量在照度不大于100 000 lx的条件下进行数据采集。
4 结论
通过不同工况测试,得出三维激光路面裂缝识别系统病害识别准确率受检测车速、雨水、光照强度的影响规律如下:
(1) 一定范围内裂缝识别准确率与车速成反相关关系。车速低于80 km/h时,准确率高于90%且较稳定,能满足规范要求;车速为100 km/h时准确率为87.8%,基本能满足日常巡查的要求。实际道路检测中,车速控制在80 km/h能满足准确率和工效的要求。
(2) 激光对路面湿度极为敏感,裂缝识别准确率与路面湿度成反相关关系。湿度在30%左右时,路面水膜明显,采集的数据噪点较多,识别准确率极低;随着湿度的降低,识别准确率不断提升,在路面湿度降至7.6%时准确率达到92.0%。三维激光路面病害识别技术在路面湿度低于8%时基本能保证准确率在90%以上。
(3) 裂缝识别准确率随照度降低明显增强,F1值敏感性次之,召回率基本不随照度改变而改变。准确率受光照强度影响较大主要是因为照度越大,光噪点越多,误判比例越高。而漏判基本不受影响。为保证识别准确率,应尽量在照度不大于100 000 lx的条件下进行数据采集。
猜你喜欢
铁道建筑(2022年3期)2022-04-07
绿色建筑(2020年3期)2020-11-23
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
照明工程学报(2017年3期)2017-07-10
时代英语·高二(2015年2期)2015-05-18
汽车维护与修理(2015年5期)2015-02-28
新疆农垦科技(2014年6期)2014-02-28
植物营养与肥料学报(2011年2期)2011-10-26