
巡检机器人无线充电最大效率传输方法研究
2020-12-17 12:45杨勇
自动化仪表 2020年12期
杨 勇
(浙江浙能温州发电有限公司,浙江 温州 325602)
0 引言
巡检机器人可以完成设备、设施的日常巡检和安全监控,解决目前火力发电厂输煤系统巡检存在的效率低、质量差、安全风险大及影响职工健康等问题。在输煤现场设置无线充电基座。机器人可自主行走至无线充电基座,通过无线方式补充电能,并在充电完成后继续巡检。这不仅能避免传统充电方式可能引起的火花、触电等安全隐患,也为无人值守输煤系统的早日实现打下坚实基础[1-3]。
感应电能传输(inductive power transfer,IPT)系统以高频磁场作为传输介质,通过发射和接收线圈间的磁场耦合实现电能的无线传输[4-6]。文献[7]详细分析了串-串补偿型 IPT系统负载与效率的关系,得到了系统效率最优所对应的交流负载电阻,并采用半控整流桥控制整流桥交流等效电阻恒为最优交流负载电阻。同时,逆变桥通过原副边之间的通信对系统输出进行恒压控制。Minfan F等提出了一种新型级联Boost-Buck电路拓扑[8],旨在为IPT系统提供最佳阻抗匹配。与传统的“单开关”拓扑结构相比,升压降压“双开关”拓扑结构为IPT系统的设计和控制提供了更大的灵活性。Xin D等基于Buck变换器,提出了一种电流连续模式(continue current mode,CCM)和电流断续模式(discontinue current mode,DCM)组合调节的新型阻抗匹配方法[9]。其控制策略是调节Buck变换器的工作模式和占空比参数,以便在检测到负载变化时使Buck变换器的输入阻抗维持不变。
相对于Buck变换器,Boost变换器可以减小等效负载阻抗、增大反射阻抗。Boost型组合整流器在调节能力和谐振电路方面效率更好[10],非常适用于高电压、低电流的负载。本文采用Boost变换器,研究IPT系统传输效率优化问题。该研究具有一定的实用性和先进性。
1 最优阻抗确定
图1为IPT系统基本电路图。

图1 IPT系统基本电路图
它包括逆变器、耦合系统、整流器和负载。其中:Uin为高频交流电压源;IP、IS分别为初、次级侧的谐振电流;LP、CP分别为初级侧线圈自感和补偿电容;LS、CS分别为次级侧线圈自感和补偿电容;RP、RS分别为初、次级侧线圈的交流阻抗;M为初、次级侧线圈之间的互感;Rin和R1分别为系统输入端和整流桥前等效阻抗;RL为系统的等效负载阻抗;C1为整流器滤波电容;UC1为滤波电容两端电压。
根据图1,可得到以下系统传输功率及效率表达式。
(1)
(2)
(3)
(4)

(5)
从式(5)可以看出,系统传输效率由ω、RP、RS、R2和M确定。对式(5)求导,则基于最大传输效率的最优负载条件可以使用以下极值条件求得。
(6)
最优负载R2,opt为:
(7)
2 Boost变换器输入阻抗特性分析
当负载RL变动时,R2不再满足最优负载条件,导致系统传输效率下降。为保证传输效率基本不变,考虑在整流桥和负载RL之间加入Boost变换器。基于Boost变换器的IPT系统结构如图2所示。当负载RL变动时,通过调节Boost变换器的占空比d,可以使R2始终处于最优。

图2 基于Boost变换器的IPT系统结构图
Boost变换器有两种基本工作模式,即CCM和DCM。CCM是指Boost变换器的电感电流总大于零。DCM是指Boost变换器的开关管关断期间有一状态为一个临界状态,即在开关管关断末期电感电流刚好为0。两种模式的工作条件为:
(8)
式中:d为Boost变换器的占空比;T为Boost变换器的开关周期。
Boost变换器工作在CCM和DCM模式下时,电感L上的电流IL波形如图3所示。

图3 Boost变换器工作在不同模式的电感电流波形
图3中:dT为MOS管Q5导通、二极管S关断的工作时间;d1T为MOS管Q5关断、二极管S导通的工作时间。
在CCM模式下,d+d1=1,则R2为:
(9)
在DCM模式下,R2为:
(10)
3 仿真验证
选取Boost变换器MOS管频率为50 kHz,占空比变化范围为0.15~0.55,电感L=100 μH。为保证Boost变换器始终工作在DCM模式(RL大于100 Ω即可),R2随占空比变化曲线如图4所示。由图4可知,增大占空比可以减小R2。

图4 R2随占空比变化曲线
4 控制方法
由式(10)反解出当系统负载RL变化时,稳定系统传输效率的最优占空比的调节规律,如式(11)所示。
(11)
求解最优占空比时,首先根据式(8)判断系统工作在CCM,还是DCM模式。为了便于实现该调节规律,可以依据式(11),建立关于负载RL和最优占空比dopt之间的一个更为直观的搜索表。当系统中电子元件的参数不变时,对于某个瞬时的一个确定负载值,存在唯一对应最优占空比。
图5为变负载条件下的控制框图。系统实时采样负载的电压电流。控制器根据采样值计算出实时的负载值,然后通过查表,控制器输出维持R2,opt不变所需的Boost变换器占空比dopt,从而稳定系统的传输效率。

图5 变负载条件下系统的控制示意图
5 试验验证
RL取 80 Ω、100 Ω、120 Ω、200 Ω、250 Ω和300 Ω。Q5的开关频率为 50 kHz。占空比d随着负载的变化而变化。同一负载有无Boost变换器的系统效率试验曲线如图6所示。从图6中可以看出,加入Boost变换器,系统传输效率明显增加。
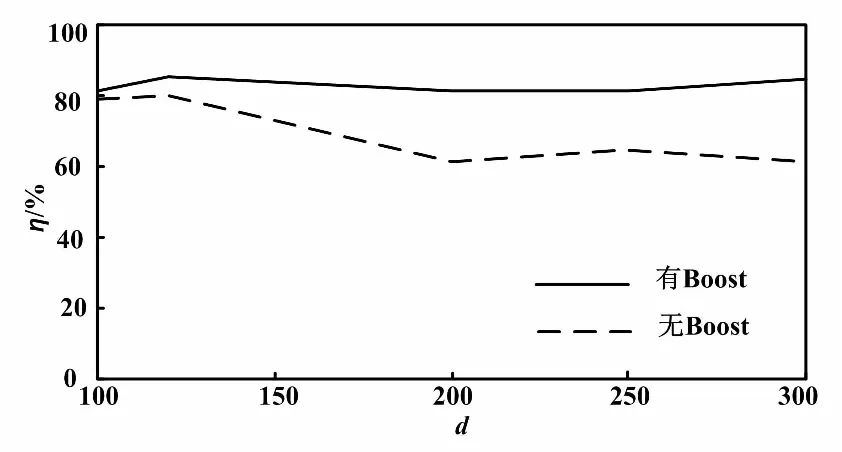
图6 系统传输效率试验曲线
6 结论
本文主要研究变负载条件下IPT系统的阻抗匹配方法,以获得最大效率传输。为了稳定系统的传输效率,在整流桥输出端和电池负载之间加入Boost变换器[11]。在蓄电池充电过程中,当等效负载阻值变动时,通过调节Boost变换器的占空比使系统等效负载始终维持在最优负载值。维持等效负载阻值不变,从而提高系统电能传输效率。仿真和试验均验证了Boost变换器稳定系统传输效率中的阻抗变换作用,即Boost变换器实现阻抗匹配的有效性。
猜你喜欢
大电机技术(2022年4期)2022-08-30
计算技术与自动化(2022年2期)2022-07-04
电机与控制应用(2022年4期)2022-06-27
电源学报(2022年1期)2022-02-25
通信电源技术(2021年9期)2021-09-23
空间电子技术(2020年2期)2020-06-04
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
科技创新导报(2016年8期)2016-10-21
中学生数理化·高二版(2016年5期)2016-05-14
