
倾斜摄影和三维激光扫描技术在历史建筑三维重建中的应用
2021-01-07 01:59李核心
赤峰学院学报·自然科学版 2021年12期
李核心

摘 要:针对传统历史建筑测绘方法工作量大、准确性低、成果形式单一的问题,提出了基于倾斜摄影和三维激光点云融合技术应用于历史建筑测绘,制作准确、完整的图纸,并进行三维仿真建模,实现了历史建筑的全面、准确测绘且成果丰富,为历史建筑后期开展维护管理、保护修缮、合理利用提供准确、完整的基础资料。
关键词:倾斜摄影;三维激光扫描;Lidar;点云;历史建筑
中图分类号:P208 文献标识码:A 文章编号:1673-260X(2021)12-0033-03
历史建筑是不可再生的宝贵文化资源和历史传承的重要载体。保护和弘扬传统优秀建筑文化,建设有历史记忆、文化脉络、地域特色的美丽城镇,是推进新型城镇化建设、建设文化强省的重要内容。准确、完整的测绘历史建筑物平面图、立面图和各类详图,对于历史建筑物的修缮、复原具有重要意义。传统方法通过采用全站仪、测距仪和皮尺等工具对历史建筑物进行丈量并绘制相应图件,存在工作量大、准确性低、成果形式单一等问题。倾斜摄影和三维激光扫描技术采用非接触、全息扫描的方式采集历史建筑表面的密集点云数据和纹理色彩,后期结合相关的软件可快速复建出历史建筑的三维立体模型,在此基础上绘制出相应的平面图、立面图和剖面图等二维平面信息[1]。与传统采集方式相比,该方法具有采集效率高、精度高、成果丰富等特点,对历史建筑物的测绘、保护提供了非常好的技术手段。
1 总体技术路线
首先对测区进行现场踏勘,了解测区地形及周边情况,合理地设计控制点,通过倾斜摄影测量、三维激光扫描测量和全景影像采集高效地获取历史建筑周边、屋顶、外立面、室内灯全方位信息,通过多源数据融合手段构建完整的历史建筑基础数据,在此基础上生产各类测绘成果,如图1所示。
2 外业数据采集
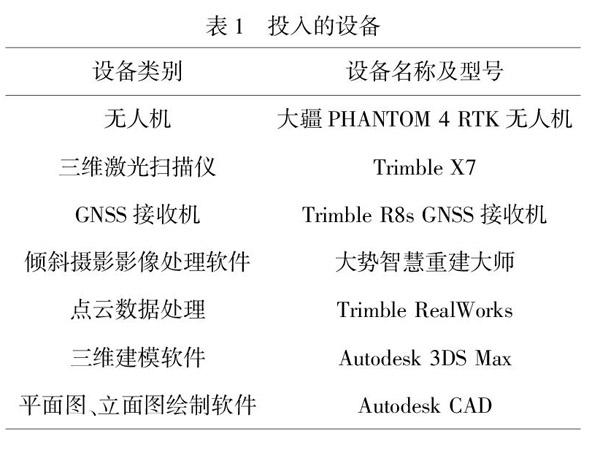
2.1 投入的设备
投入的设备如表1所示。
2.2 倾斜摄影测量数据采集
制定倾斜摄影测量飞行计划:根据摄区形状、工作量、飞机飞行的安全航高,结合摄区地形情况,并依照航空摄影的相关技术要求,制定无人机的飞行计划,重点设计飞行航高、航向重叠度、旁向重叠度、影像地面分辨率等参数。
布设像控点:根据设计的飞行计划,采用合理的像控点网布点方案,一般采用区域网布点方案,为保障成果精度,像控点在航线方向和旁向的跨度一般为300米,个别困难地区在保证精度情况下可适当放宽到400米。像控点的目标影像应清晰,易于判别。弧形地物及阴影、狭沟、尖山顶和高程变化急剧的斜坡等,均不宜选作刺点目标。
航摄实施:所摄区域空域申请经航空管制部门批复后,方可进行航空摄影。各种审批手续办完以后,外业航摄人员开展摄影作业。航摄飞行要求应满足《IMU/GPS辅助航空摄影技术规范》(GB/T 27919-2011)中6.2节之规定。
2.3 点云、全景数据采集
通过Trimble X7三维激光扫描仪对建筑物进行扫描,获取其空间三维数据、颜色信息、纹理等方面的数据,并建立档案,为以后建筑物改造或复原提供了依据。
外业数据采集流程如下:
(1)作业方案制定:首先对现场进行踏勘,确定扫描作业方案,在建筑内外部合理布设测站点。
(2)点云获取:在各测站点上架设激光扫描仪,利用Trimble X7三维激光扫描仪对现场进行扫描,获取建筑外部和内部的点云信息。
(3)全景影像获取:采用的Trimble X7三维激光扫描仪能够在扫描点云的同时获取物体表面影像。除此之外,需补充对建筑的平、立、剖面不同方向和局部的拍照,对重要的保护建筑进行录像,直接作为数据存档。
3 内业数据处理
3.1 倾斜摄影影像处理
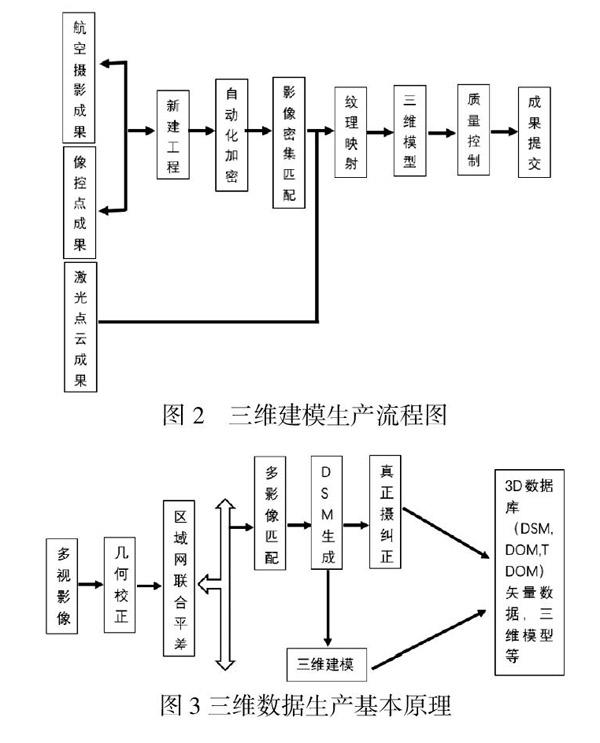
倾斜影像采用武汉大势智慧科技有限公司重建大师倾斜影像自动三维重建系统进行实景三维建模,三维建模生产具体流程如图2所示。
倾斜摄影测量技术通常包括影像预处理、区域网联合平差、多视影像匹配、DSM生成、真正射纠正、三维建模等关键内容,其基本原理如图3所示。
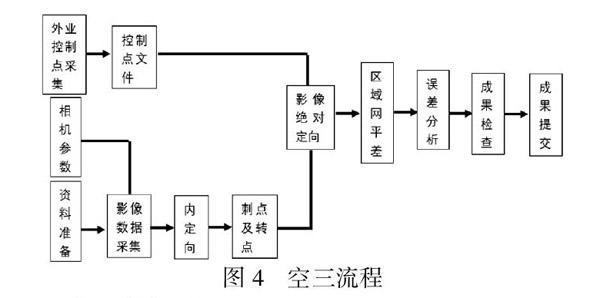
空中三角测量阶段需要外业控制点文件以及点之记、原始影像及相机文件;计算机完成自动相对定向后通过人工选点、刺点完成区域绝对定向;分析误差,空三成果检查合格后提交空三资料,最后利用空三成果进行模型重建。空三流程如图4所示。
3.2 点云数据处理
外业扫描获取单站的点云,通过Trimble RealWorks软件进行全自动或手动拼接,将各站点云归至同一坐标系下,合为一个测区的整体点云成果。主要工作流程如下:
(1)导入原始数据,Trimble X7三维激光扫描仪采集的原始数据可直接在RealWorks软件中打开或拖入到RealWorks软件中,并且在导入阶段就可以进行数据采样、过滤工作和点云自动着色。
(2)通过RealWorks软件的全自动配準或单点配准功能进行点云之间的拼接配准。
(3)完成点云配准后,建筑的彩色点云已经能够立体展示其结构和纹理,快速实现了三维成型。
3.3 倾斜摄影与三维激光扫描数据融合
将空三生成的密集点云与经预处理后的三维激光扫描的点云导入点云数据处理系统对点云数据进行融合处理。首先在软件中对点云初步处理包括消除数据冗余、点云数据裁切分幅、噪声点粗差分类;然后通过自动分类的宏命令对点云自动分类,对自动分类后的激光点云进行人工干预,对点云自动分类后的被错分、少分、或是难以区分的地物进行编辑与修改,同时,对无数据的水系区域、建筑物区域、被遮蔽区域进行针对性处理。最后运用控制点坐标进行点云数据坐标转换,生产目标坐标系的分类后激光点云数据包括地面点点云,非地面点点云,低点、飞点、噪音点,条带间冗余点[2]。通过软件运用宏命令对非地面点点云进行各类地物类别分类,如建筑类别点云、道路类点云、其他各类点云,最终用于历史建筑物三维模型生产。
3.4 正射点云数据制作
历史建筑点云经数据融合后,为了将点云数据转换为建筑的图形数据,需要将点云数据进一步进行处理,制作正射点云数据成果。
(1)对历史建筑各个立面和每层平面分别进行切片,获取每个立面和平面的独立点云数据;(2)通过坐标转换使每个立面和平面都成为正投影点云;(3)对每个正投影点云数据进行保存和输入,使其成为独立的点云数据;(4)最后将正射点云数据与CAD联动进行制图。
3.5 平、立、剖面建筑图绘制
将上一步多得到的正射点云通过Pointools for CAD导入,提取建筑结构特征和量测距离,按合适比例绘制专业的建筑平面图、立面图和剖面图。平面图要求标注墙中轴线、墙体布置及宽度、门窗定位、楼梯、庭院外廊立柱、阳台、室外台阶;立面图标注门窗定位及高度、檐口和屋脊标高、4个方位的立面,绘制单线图;剖面图标注屋架搁置方向,地面、室外、檐口、屋脊、屋架下弦标高[3];发现墙体较大裂缝和其他较严重的毁损,附加简单注明。
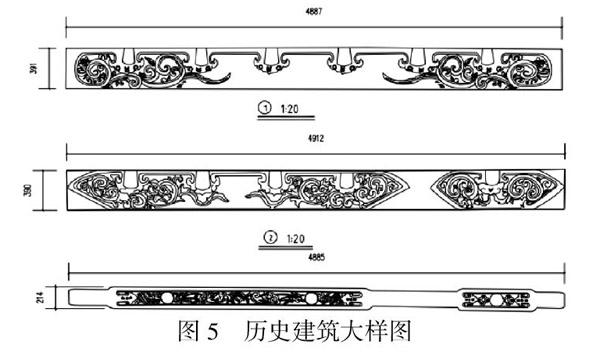
3.6 历史建筑大样数据制作
为完整、真实反映历史建筑物的建筑细节,需制作历史建筑物大样图,可采用点云数据和照片表达大样图的方法进行制作。由于大样图通常为抽象的雕花等复杂结构,采用传统手绘的方法无法真实和立体地反映大样的特征和细节,因此采用彩色点云数据直接表示大样成果,既保证了大样成果的真实性,又保证了尺寸的高精度,同时把大样数据表达从二维表达提升到三维表达,更加立体和逼真。
3.7 三维仿真建模
根据融合后的点云、倾斜影像和全景数据,利用软件提供的绘图工具绘制建筑表面轮廓线,分析和制作建筑的主体几何结构,从而搭建建筑几何模型,已绘制完成的建筑平、立、剖面图也可直接用于三维仿真建模。后续将几何模型导入3d Max等专业建模软件中对模型进一步细化和完善,并赋予纹理贴图,制作建筑精细模型,不但作为数字化存档,并能够结合GIS实现虚拟现实浏览与展示[4]。
4 结束语
本文充分利用倾斜摄影测量和三维激光扫描的技术特点,通过外业数据采集、内业数据处理,融合多源点云数据进而制作历史建筑正射点云数据,绘制历史建筑平、立、剖图形,构建精细三维模型等过程,探索出融空地多源数据为一体的历史建筑数字化测绘技术路线,为历史建筑留下了宝贵的基础性资料,方便后期开展维护管理、保护修缮、合理利用等工作。
参考文献:
〔1〕樊冠嵩.三维激光扫描技术在古建筑测绘中的应用[J].浙江测绘,2020,42(03):35-38.
〔2〕楊必胜,梁福逊,黄荣刚.三维激光扫描点云数据处理研究进展、挑战与趋势[J].测绘学报,2017,46(10):8.
〔3〕刘永锋,李翅,周凯,等.三维激光扫描技术在历史建筑物测绘中的应用[J].城市勘测,2018,33(02):5.
〔4〕方喜波,顾亚静.三维激光扫描技术在天津市历史文化街区三维模型库建立中的应用探讨[J].北京测绘,2020,34(05):86-90.
猜你喜欢
城市地理(2017年8期)2017-11-02
科技资讯(2017年24期)2017-09-15
智能计算机与应用(2017年3期)2017-07-15
农家科技(2017年5期)2017-07-14
中国新技术新产品(2017年14期)2017-07-07
中国科技纵横(2017年3期)2017-03-29
科技创新导报(2016年26期)2017-03-13
中国科技纵横(2016年21期)2017-02-13
科技视界(2016年4期)2016-02-22
绿色科技(2015年6期)2015-08-05
