
基于卷积神经网络的岩心FIB-SEM 图像分割算法
2021-01-15 07:18王润涵滕奇志
计算机工程 2021年1期
王润涵,李 兵,滕奇志
(1.四川大学 电子信息学院 图像信息研究所,成都 610065;2.中国石油测井有限公司 技术中心,西安 710077;3.中国石油天然气集团有限公司测井重点实验室,西安 710077)
0 概述
近年来,页岩气、致密气、致密油等非常规油气产量快速上升,其勘探开发受到广泛关注[1]。与常规油气资源不同,非常规油气储层主要为微纳米级孔隙结构。研究岩心微纳米级孔隙空间结构对非常规油气资源勘探开发具有重要的指导意义[2-3]。聚焦离子束扫描电镜(Focused Ion Beam-Scanning Electron Microscope,FIB-SEM)是一种研究非常规油气储层结构的新方法[4],其使用离子束轰击样品表面以发生溅射,再通过电子束观察表面成像。FIB-SEM 成像技术可用于恢复岩心真实三维孔隙结构图像[5],但若要进一步提取三维孔隙,则需对图像进行物相区分,使用分割算法提取图像中的孔隙[6]。受FIBSEM 成像原理影响,目前提取孔隙存在以下问题:由于电子束并非垂直击中观察面,样品观察面底部接收到的信号比上部弱,因此最终扫描图像由上至下亮度会逐渐变暗,导致利用阈值分割等传统方法进行物相分割时会产生较大干扰[6];岩心图像中有机质和黏土矿物等杂质的灰度值与孔隙相近,增加了孔隙提取难度;采用FIB-SEM 成像技术可呈现孔隙内部细节,但电子束作用在孔隙内部时会使其在图像上出现局部高亮现象[6],对孔隙的精确提取造成严重干扰。
针对上述问题,研究人员提出众多解决方案。2012 年,SALZER 等人[7]采用两阶段分割算法提取多孔介质的孔隙,对易分割的高光区域进行反向传播,但要求非孔隙区域灰度值差异较小,且在岩心FIB-SEM 图像中存在多种杂质干扰的情况下不能有效提取孔隙。2014 年,SALZER 等人[8]又提出一种基于FIB-SEM 图像在Z方向上灰度值变化情况的孔隙提取方法,但对含有黏土矿物、有机质、岩石等多种杂质的岩心图像,会错误提取到杂质边缘,无法精确提取空隙。2016 年,王羽等人[9]分别采用边缘检测、流域和手动阈值分割方法对页岩FIB-SEM 图像进行实验,但上述方法具有受孔隙形貌影响较大、无法提取狭缝以及依赖人工选取阈值等缺点。2018 年,户瑞林等人[10]提出基于主动轮廓的岩心FIB-SEM 图像孔隙提取方法,分割前用人工选择控制点提取孔隙边缘,再利用序列图像的相关性进行形态学处理提取图像孔隙,但需要预先人工选取轮廓点,当空隙数量较多时人工操作较繁冗,且由于需提取孔隙边缘,对边缘不明显的孔隙无法进行精确提取。
近年来,深度卷积神经网络(Convolutional Neural Network,CNN)在图像语义分割应用方面取得良好的效果[11-13]。为增强有用信息的表达并优化全局特征的依赖关系,研究人员在深度卷积神经网络的基础上引入注意力机制[14-15]。与传统图像语义分割算法相比,基于深度卷积神经网络的分割算法能更好地提取图像特征,且采取端到端的分割方式而无需依赖人工处理,目前基于卷积神经网络的岩心FIBSEM 图像分割算法较少。
本文提出一种端到端的岩心FIB-SEM 图像分割算法。建立岩心FIB-SEM 图像数据集,结合光流法与分水岭分割法标注序列图像,构建基于深度卷积的岩心FIB-SEM 图像分割网络,将通道注意力模块嵌入以残差网络为主干网络的编码器,利用多尺度空间注意力模块和特征金字塔注意力模块提取更多特征信息,并使用亚像素卷积模块通过上采样恢复图像分辨率。
1 岩心FIB-SEM 图像数据集及标注方法
1.1 数据集构建
本文为训练岩心FIB-SEM 分割网络并对其进行定量评价,构建岩心FIB-SEM图像数据集,具体流程如下:
1)对岩心FIB-SEM 图像数据库(包含约15 000张图像,由多组致密碳酸盐岩序列图构成)进行图像标注,根据序列图像的层间相关性,使用1.2 节提出的结合光流与基于标记的分水岭分割的标注方法对图像进行标注。
2)在上述数据库中随机选取质量较好的4 264 张图像,裁剪出含有孔隙结构的区域,统一尺寸为400 像素×400 像素。
3)从4 264 张图像中随机选取2 602 张图像和600 张图像作为训练集与验证集,余下1 062 张图像作为测试集。
岩心FIB-SEM 图像示例如图1(a)所示,实线圆圈内为孔隙区域,虚线圆圈内为有机质或者黏土矿物。可以看出,FIB-SEM 图像呈现出孔隙内部细节,在电子束的作用下,同一个孔隙对应的区域灰度值差异明显,包括灰度值较高的高光部分与灰度值较低的黑洞部分,有机质和黏土矿物呈现出与孔隙相似的灰度分布。该图像标注后所得分割结果如图1(b)所示,白色部分代表孔隙区域,黑色部分代表背景区域。图2 为岩心FIB-SEM 图像数据集部分图像示例,这些图像中孔隙数量和灰度分布均不同。
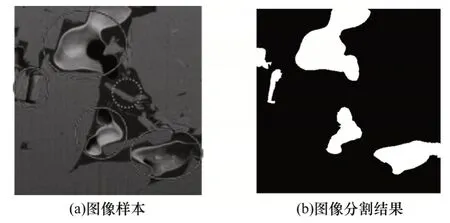
图1 岩心FIB-SEM 图像样本及其分割结果Fig.1 Sample of core FIB-SEM images and its segmentation result
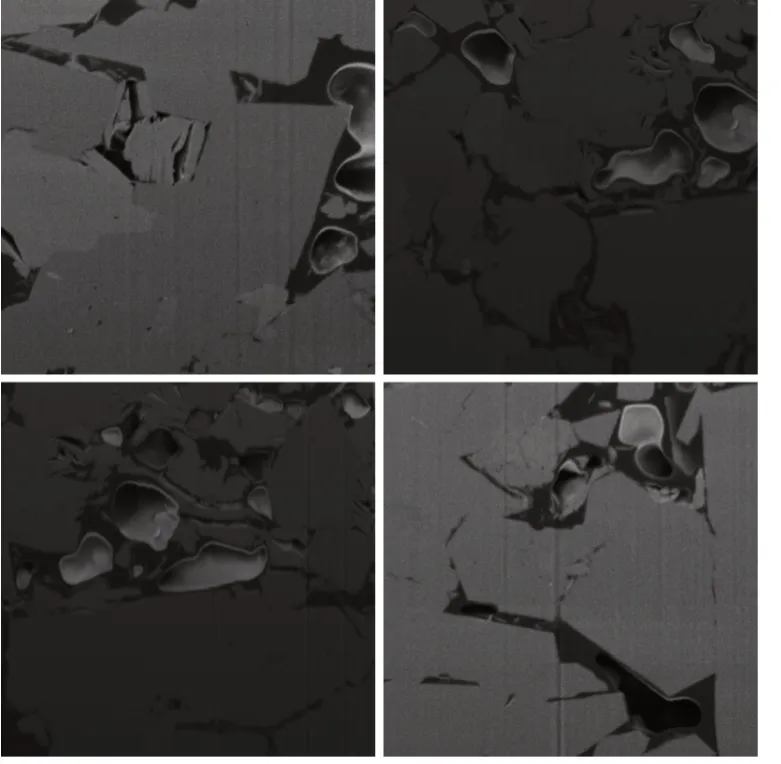
图2 部分岩心FIB-SEM 图像样本Fig.2 Part of samples of core FIB-SEM images
1.2 本文图像标注方法
对于目标为语义分割的图像标注任务,常用方法是采用Labelme[16]、Flickr 等图像标注系统手动选取目标边界,并对每张图像进行标注。上述标注系统虽然为手动标注单张图像提供便利,但仍需耗费较长时间。
本文所用的岩心FIB-SEM 图像数据集由若干组序列图构成,序列图之间有较强的层间相关性,相邻帧之间的差异不大,孔隙区域随帧序列缓慢变化而不会发生突变。因此,当采用基于标记的分水岭分割方法标注第一帧图像时,可使用光流法跟踪得到对应标记点在下一帧中的位置,从而下一帧图像无需重新选取标记点,仅调整不合适的标记点位置进行分水岭分割即可,可大量缩短手工标注时间。
光流法的原理是利用序列图的相关性及对应像素点的变化获取相邻两帧之间关键特征点的对应关系,并由此得到相邻帧间目标物体的运动信息。Lucas-Kanada 稀疏光流法(以下称为LK 光流法)是常用的一种光流法,其利用两帧之间的差分计算光流[17]。假设相邻两帧中同一个物体亮度不变,有以下关系式:

其中,I(x,y,t)为目标物体在(x,y)位置和t时刻的像素值,在t+Δt时刻该物体位于(x+u,y+v)位置。采用泰勒公式将式(1)展开得到:

简化式(2)后得到:

将式(3)写为矩阵形式为:

文献[19-20]提出基于标记的分水岭分割方法,对图像中目标区域进行标记,该标记会将此区域强制修改为梯度图像的极小值区域。通常在目标区域和背景区域设置标记,再采用分水岭分割方法分割出目标与背景。
本文将光流跟踪与基于标记的分水岭分割方法相结合作为图像标注方法,如图3 所示。
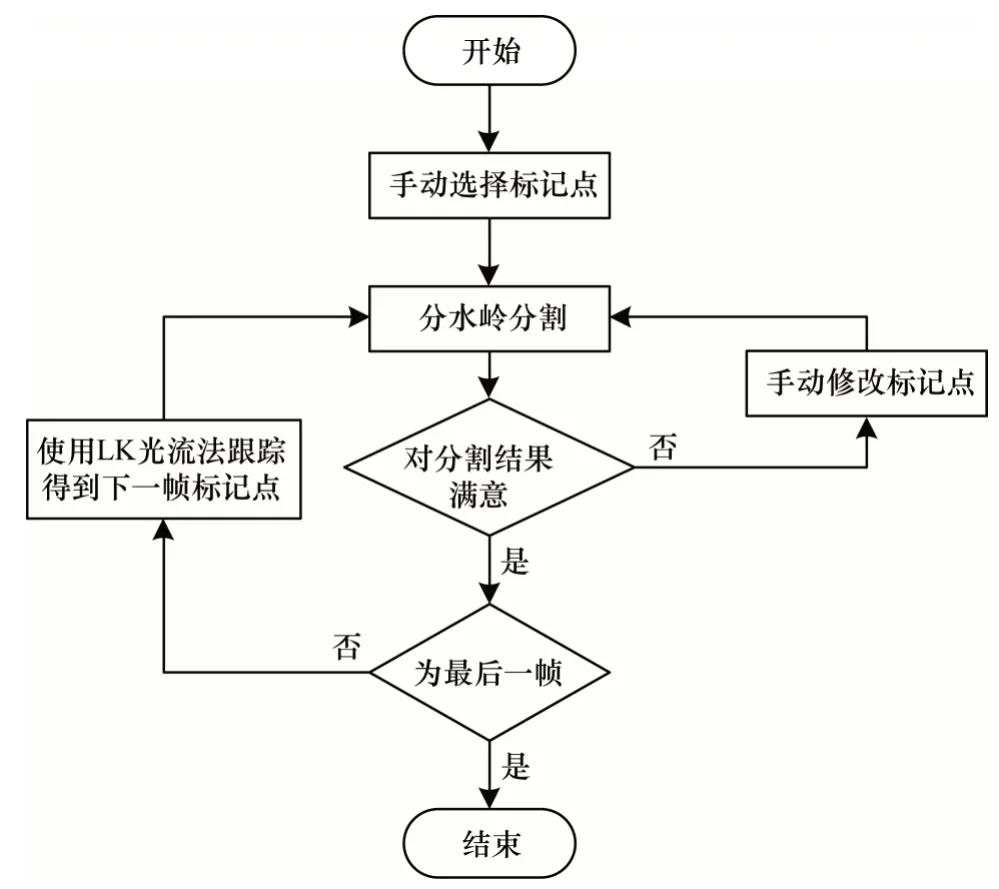
图3 本文图像标注方法流程Fig.3 Procedure of the proposed image annotation method
该方法具体流程如下:
1)手动选择标记点作为改进LK 光流法的特征点(见图4),这些标记点同时作为分水岭分割方法的标记点,图4中实心标记处为孔隙目标,空心标记处为背景。
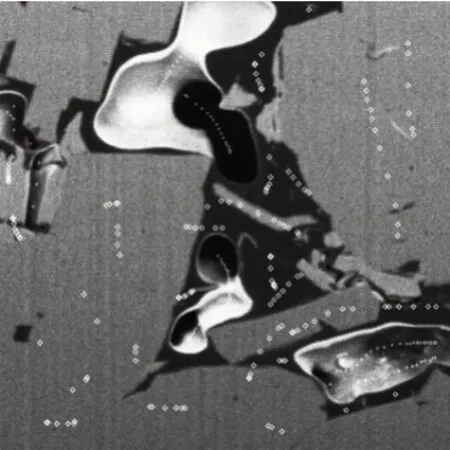
图4 手动选取的标记点Fig.4 Manually selected mark points
2)使用分水岭分割方法得到分割后的图像,如图5所示。若该图像经人工判别可作为标注图像,则进行步骤3;否则手动修正标记点,再次重复步骤2。图6 为手动修正标记点前后的情况。其中,分割后的图像左上角缺少背景标记(见图6(a)),导致左上角被分割为孔隙(见图6(b)),经过手动修正标记点(见图6(c)),得到最终分割结果(见图6(d))。
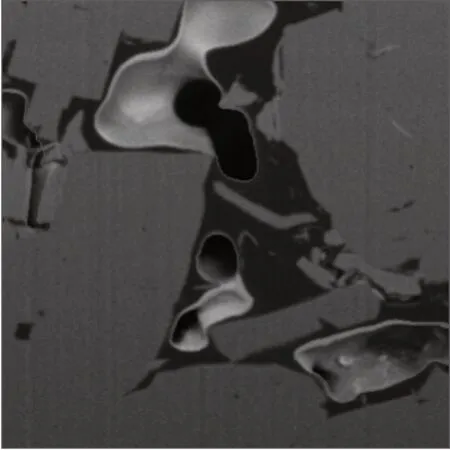
图5 分水岭分割方法的分割结果Fig.5 Segmentation result of watershed segmentation method
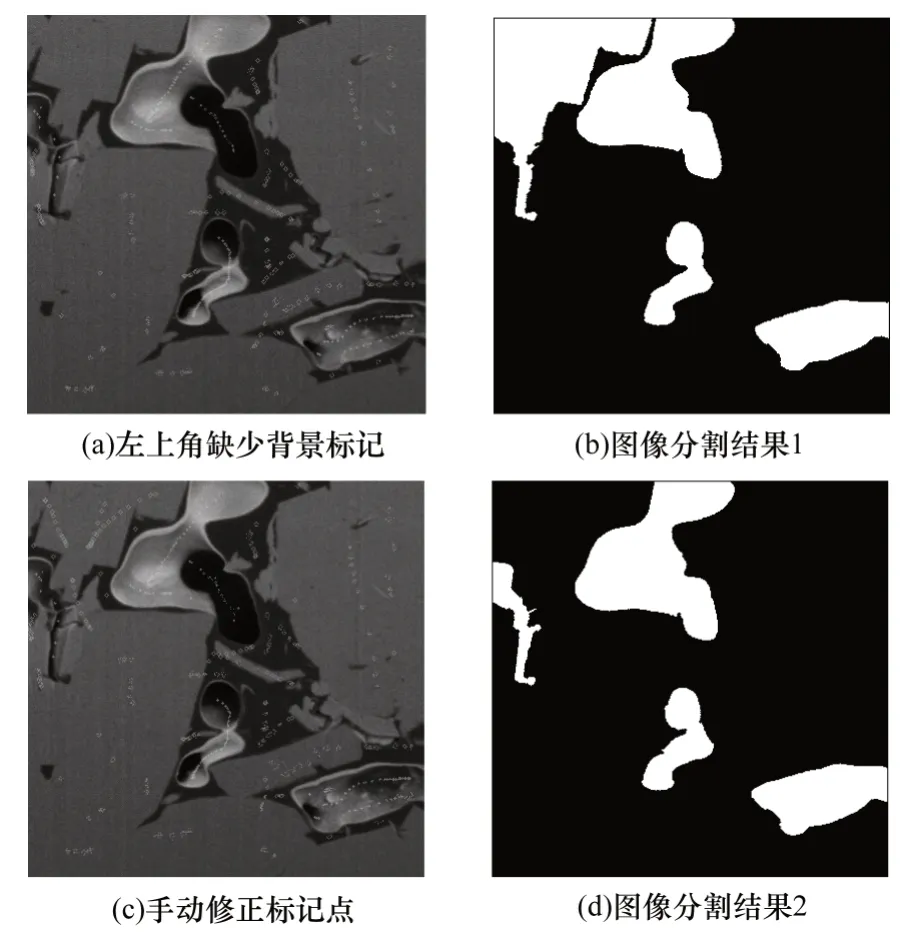
图6 手动修正标记点前后的情况Fig.6 The situation before and after manual correction of mark points
3)若当前图像为最后一帧,则整个流程结束;否则使用改进LK 光流法跟踪当前图像标记点,得到下一帧图像标记点。由于有些标记点不满足改进LK光流法的跟踪要求,在下一帧图像上这些标记点会消失,因此需重复步骤2 再次调整。图7 为使用改进LK 光流法所得连续5 帧图像的标记点,其中半透明线段标记处为标记点移动轨迹。
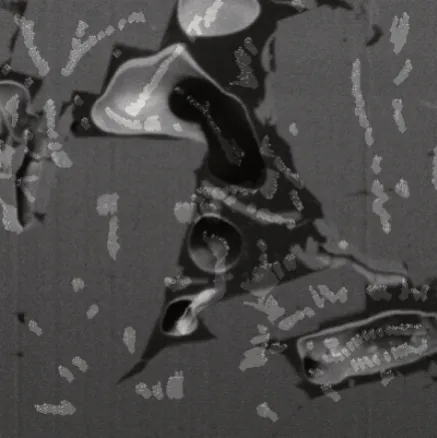
图7 连续5 帧图像的标记点Fig.7 Mark points of five consecutive frames
2 岩心FIB-SEM 图像分割算法
本文提出一种岩心FIB-SEM 图像分割算法,其流程如图8 所示,算法具体如下:
1)利用残差通道注意力(Residual Channel Attention,Res-CA)模块提取特征。
2)解码部分使用多尺度空间注意力(Multiscale Spatial Attention,MSA)模块以得到更精确的目标区域。
3)利用改进的特征金字塔注意力(Feature Pyramid Attention,FPA)模块提取不同尺度特征信息。
4)采用亚像素卷积(Sub-Pixel Conv)模块解码部分的上采样以准确获取分割边缘。
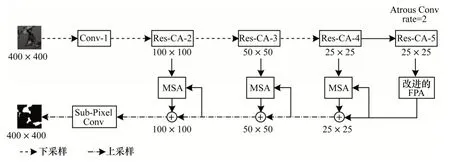
图8 本文算法流程Fig.8 Procedure of the proposed algorithm
2.1 注意力模块
2.1.1 残差通道注意力模块
由于特征图每个通道被视为特征检测器,因此利用通道注意力机制重点关注最能代表输入图像特征的通道。将通道注意力(Channel Attention,CA)模块[15](见图9)嵌入ResNet 50 网络得到残差通道注意力模块(见图10),即将ResNet 50 中卷积层(Conv)的输出作为CA 的输入特征(Input Feature)图,并与CA 的输出相加,其结果输入至ReLu 激活函数,即完成通道注意力模块的嵌入。
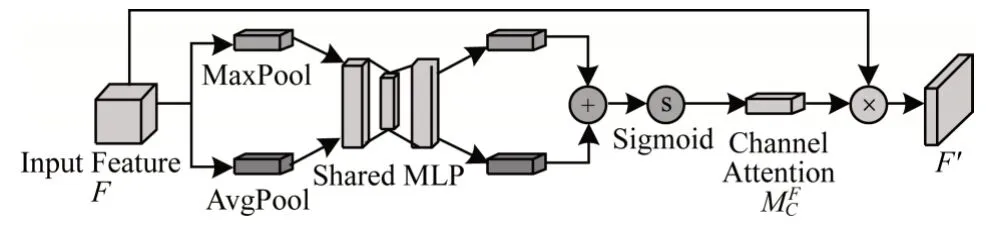
图9 通道注意力模块Fig.9 Channel attention module
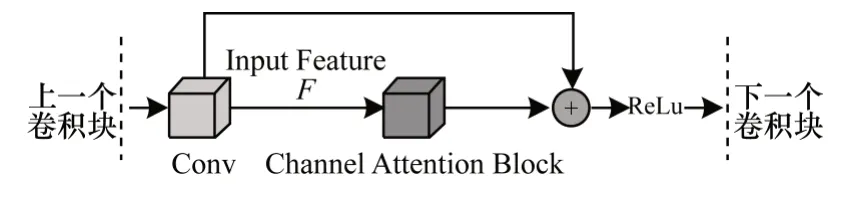
图10 残差通道注意力模块Fig.10 Residual channel attention module
令输入特征图F∈RC×H×W,其中C、H和W分别表示特征图的通道数、高度和宽度,通道注意力模块一维特征权重将输入的特征图与权重向量相乘得到通道注意力模块输出为:

通道注意力模块通过平均池化(AvgPool)和最大池化(MaxPool)获取特征图空间信息,生成两个不同的空间上下文特征向量:平均池化特征和最大池化特征,将其输入到共享网络,具有隐藏层的多层感知机(Multi-Layer Perceptron,MLP)组成该共享网络,即共享MLP(Shared MLP)。为减少参数开销,隐藏层大小设置为RC/r×1×1,其中r=8 为缩小因子。将从共享MLP 输出的两个特征向量逐像素相加进行合并,计算公式为:
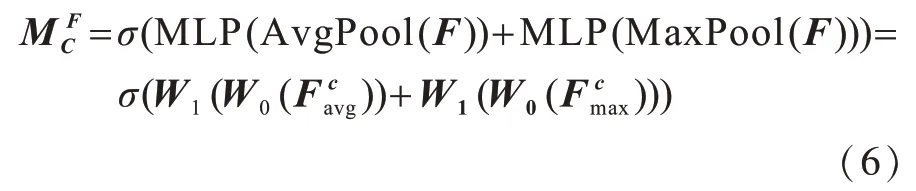
其中,σ为Sigmoid 激活函数,W0∈RC/r×C和W1∈RC×C/r分别为两个输入特征向量共享MLP 的权重参数。
2.1.2 多尺度空间注意力模块
在解码阶段,将空间注意力(Spatial Attention,SA)模块[15](见图11)嵌入多尺度特征融合结构得到多尺度空间注意力模块(见图12),以此作为对通道注意力模块的补充。空间注意力更重点关注特征图中对图像特征贡献程度较大的部位。在多尺度特征融合结构中,低、高层卷积特征分别包含较丰富的位置信息与语义信息[21-22]。为得到位置细节详细且语义信息丰富的鲁棒特征,将低层卷积特征信息逐像素的与高层卷积特征信息相加,同时为防止空间注意力模块学习到的权重向量值过小,添加与残差网络块相似的连接结构以得到更多不同尺度的特征信息。

图11 空间注意力模块Fig.11 Spatial attention module
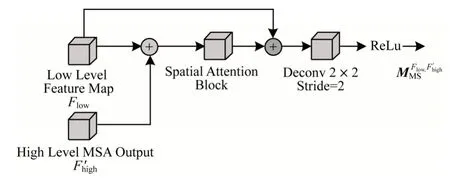
图12 多尺度空间注意力模块Fig.12 Multi-scale spatial attention module
对于输入的特征图F,将平均池化特征和最大池化特征级联后经过卷积层,并输入至Sigmoid 激活函数激活,使空间注意力模块获得特征图权重向量,表达式为:

其中,f7×7表示用7×7 的卷积核进行卷积。将输入特征图与权重向量相乘后得到空间注意力模块输出:

对于多尺度空间注意力模块,其输入为低级特征图(Low Level Feature Map)Flow和高级多尺度空间注意模块的输出(High Level MSA Output)两者尺寸相同均为RC×H×W。多尺度空间注意力模块最终输出为C'、H'和W'分别为下一级低级特征图的通道数、高度和宽度。将Flow和逐像素相加后输入空间注意力模块得到低级特征图通过跳跃连接与空间注意力模块相加,再通过大小为2×2、步长(Stride)为2 的反卷积层进行通道降维和上采样,计算公式为:

值得注意的是,在图8 中Res-CA-4 对应的MSA 模块内,由于不改变特征图大小,因此无需在反卷积层进行上采样。
2.2 特征金字塔注意力模块
特征金字塔结构可提取不同尺度的特征信息并进行融合,PSPNet[23]、Deeplab[13]等网络均采用了该结构。其中,PSPNet 在不同尺度特征上进行池化操作会丢失部分像素位置信息,在Deeplab 的金字塔结构中,若采用空洞卷积则会丢失部分局部信息并导致出现网格现象。为解决该问题,研究人员提出特征金字塔注意力模块,如图13 所示。
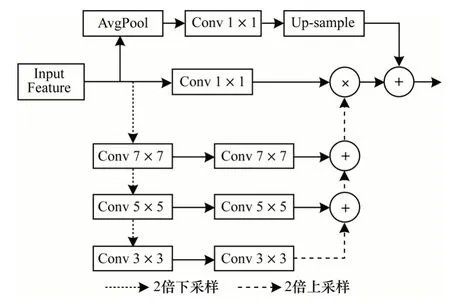
图13 特征金字塔注意力模块Fig.13 Feature pyramid attention module
在FPA 中的卷积分支中,由于使用较大卷积核进行卷积,导致网络参数量过多,计算负担增大,因此改进此模块以减少参数量并加快计算速度。在Inception模块[24]基础上改进如下:1)对于5×5 卷积块,采用堆叠两个3×3 卷积进行替换;2)对于7×7 卷积块,替换为将输入特征分别进行7×1 卷积和1×7卷积,再级联(Concatenate)并采用1×1 卷积进行降维,最终得到改进的特征金字塔注意力模块,如图14 所示。
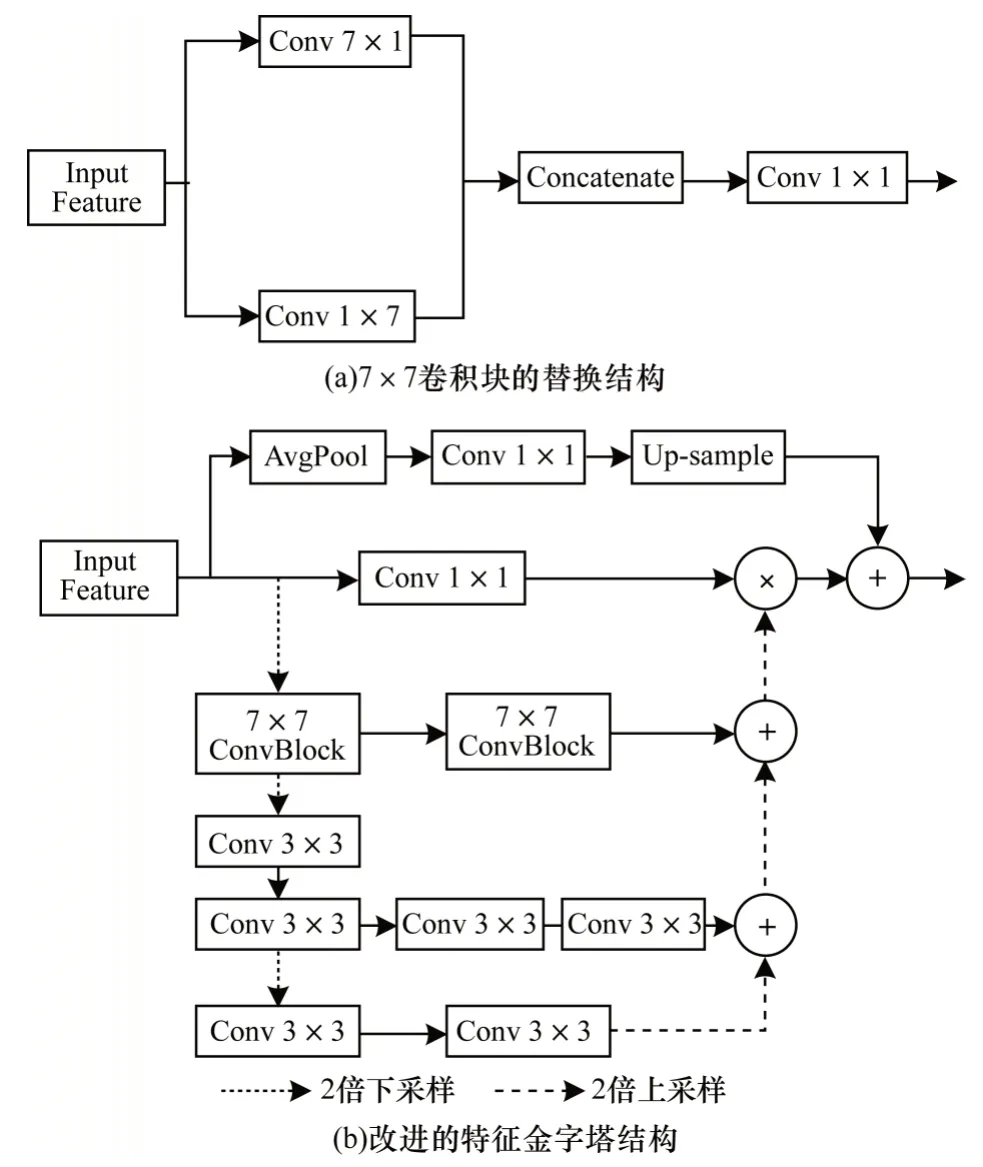
图14 改进的特征金字塔注意力模块Fig.14 Improved feature pyramid attention module
2.3 亚像素卷积模块
亚像素卷积[25]模块广泛用于超分辨率重建领域。语义分割网络在解码阶段通常使用双线性插值、反池化以及反卷积等方法进行上采样,但双线性插值与反池化无法较好地恢复精细的目标边界,反卷积方法计算量大且计算效率较低。亚像素卷积是对特征图像的特征通道进行重新排列,不包含插值和卷积操作,不会丢失边界信息且计算较简单。由于岩心FIB-SEM 图像中孔隙边缘复杂,要求提取的边缘较精细,因此本文采取亚像素卷积模块进行上采样来恢复图像分辨率,具体操作为:输入低分辨率图像ILR∈R1×H×W,其中l、H、W分别为图像的通道数、高度和宽度,采用两个步长为1/r的卷积层f1和f2提取ILR的特征,得到特征图特征通道数增大为r2,重新排列该特征图的通道得到恢复分辨率后的图像ISR∈R1×rH×rW,表达式为:

其中,PS为周期性排列算子,其将维数为C×r2×H×W的向量T重新排列为C×rH×rW的向量,表达式为:

其中,x、y为所输出高分辨率图像的坐标索引,c为所输出高分辨率图像的通道索引。
3 实验与结果分析
为评估本文提出的岩心FIB-SEM 图像分割算法的分割精度及分割速度,本文进行一系列消融实验分别评估残差注意力模块、多尺度空间注意力模块、特征金字塔注意力模块和亚像素卷积模块的性能,并将本文算法与目前主流的分割算法以及传统FIB-SEM图像分割算法进行对比。
3.1 数据集
本文构建岩心FIB-SEM 数据集进行实验,该数据集中2 602 张图像为训练集,600 张图像为验证集,1 062 张图像为测试集。为扩充数据集并避免过拟合问题,通过旋转变换、投影变换、平移变换和翻转变换对数据集进行数据增强处理,如图15 所示,采用镜像填充作为像素填充方式,最终将数据集扩大8 倍。
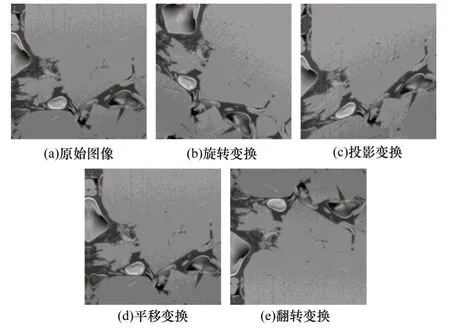
图15 数据集扩充图例Fig.15 Legend of extended dataset
3.2 实验环境与超参数设置
本文实验采用Intel®i7-7700K CPU 4.20 GHz 处理器、16 GB 内存、NVDIA GTX 1060 6 GB GPU 以及Ubuntu 16.04 操作系统、Python 3.6 编程语言和Keras 2.2.4 深度学习库。超参数设置如下:对于所有网络层的权重值,使用均值为0、标准差为的高斯分布进行初始化,其中,N为某一个神经元节点的输入节点个数;受显存限制,batch_size 设置为4,steps_per_epoch 设置为800。使用Adam 优化器进行反向传播更新参数,初始学习率为1.0×10-4,该优化器其他参数为默认值。
3.3 损失函数
本文选择交叉熵函数作为损失函数,先使用Softmax 函数处理网络最后的特征图层,将Softmax函数的输出与真实标注数据作为交叉熵函数的输入,交叉熵函数的输出即为损失值。Softmax 函数定义为:

交叉熵函数定义为:

其中,p'j为真实标签,pj为采用Softmax 函数得到的属于类别j的概率。
3.4 评价指标
因为数据集中存在较多孔隙区域占比远小于背景区域的图像,使用像素精度(Pixel Accuracy,PA)无法准确描述模型性能,会存在PA 值很高但是少数类别样本分错的情况。因此,本文使用平均像素精度(Mean Pixel Accuracy,MPA)、平均交并比(Mean Intersection over Union,MIoU)、精确率(Precision)、召回率(Recall)和F1 值作为分割精度的评价指标,计算公式如下:
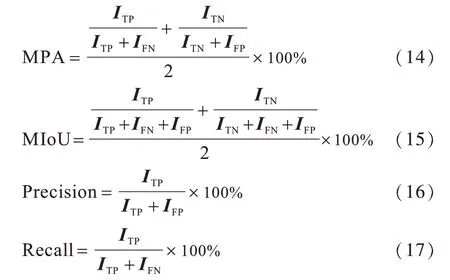

其中,ITP表示正确预测的孔隙处像素点个数,ITN表示正确预测的背景处像素点个数,IFP表示将背景预测为孔隙部分的像素点个数,IFN表示将孔隙预测为背景部分的像素点个数。
3.5 训练过程
图16 给出本文所提算法的网络模型在训练过程中训练损失的变化情况。可以看出,采用Adam 优化器使损失值迅速降低,并在迭代35 次后趋于稳定。验证损失和训练损失曲线下降趋势相近且收敛趋于平稳,训练过程无过拟合现象,且泛化能力良好。
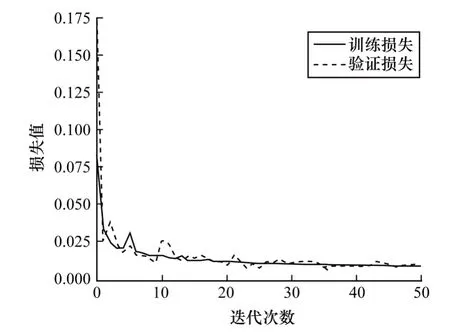
图16 训练损失变化情况Fig.16 The situation of Changes in training losses
3.6 消融实验
为证明本文提出的残差注意力模块、多尺度空间注意力模块、特征金字塔注意力模块和亚像素卷积模块对孔隙提取的有效性,进行消融实验比较上述模块对结果的影响。其中,ResNet50 作为不加入上述模块的基本网络用Baseline(其结构见图17)表示,上采样采用双线性插值Bilinear。实验结果如表1 所示,可以看出本文提出的模型各项指标值均最高,各模块均能有效提升孔隙的提取精度。其中:Res-CA 和MSA 模块通过使用注意力机制将网络注意力集中在孔隙特征部分;改进的FPA 模块使用金字塔结构进一步提取特征信息;亚像素卷积模块使孔隙边缘更加精确。
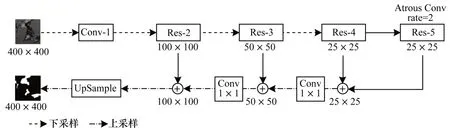
图17 Baseline 结构Fig.17 Baseline structure
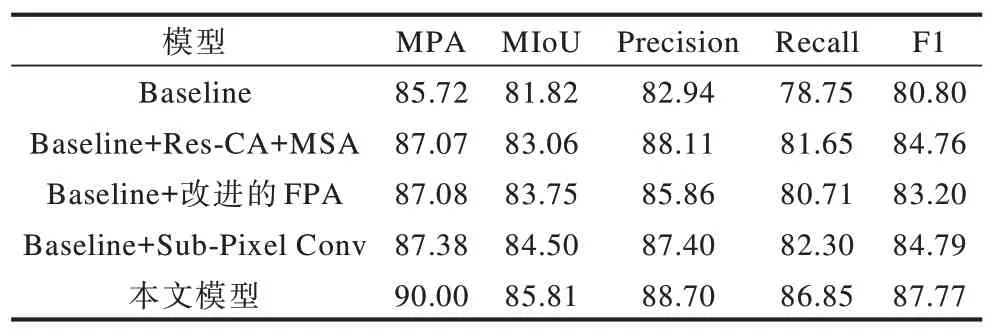
表1 不同模型对实验结果的影响Table 1 Effects of different models on experimental results %
将加入不同模块后模型所需的参数量、其对每张图像的运行时间(若运行时间短则分割速度快)以及得到的分割精度进行对比,结果如表2 所示(Deconv 表示使用反卷积进行上采样)。可以看出:Baseline+Res-CA+MSA 所需参数量和运行时间较Baseline 更多,但其MIoU 值更高;Baseline+改进的FPA 所需参数量和运行时间较Baseline+FPA 更少,且MIoU 值接近,说明使用较小卷积核替代较大卷积核具有一定的效果;Baseline+Sub-Pixel Conv 所需参数量和运行时间、分割精度都优于Baseline 和Baseline+Deconv,其得到的孔隙边缘更精确。本文模型包含上述各个模块,在降低参数量与运行时间的同时,达到最佳的分割效果。
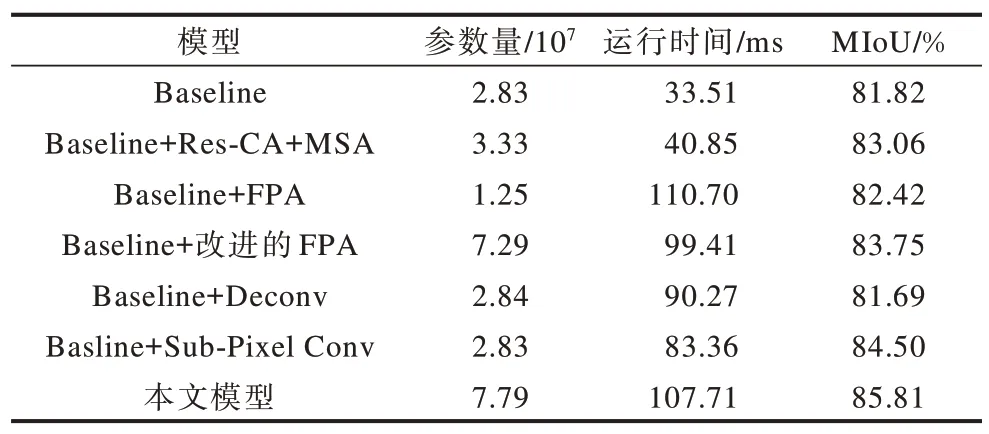
表2 不同模型在性能上的对比实验Table 2 Comparative experiments on the performance of different models
3.7 不同分割算法的对比
3.7.1 本文算法与传统分割算法的对比
传统的岩心FIB-SEM 图像分割算法包括传统阈值分割算法和基于主动轮廓的岩心FIB-SEM 分割算法[10](以下称为文献[10]算法)。将本文算法与上述两种传统分割算法的分割精度进行对比。由于文献[10]算法以序列图像的相关性为基础且需要手动标记轮廓,因此在测试集中选取80 帧序列图像进行实验,手动标记出第1 帧序列图像中孔隙区域的轮廓。该方法每次只能处理1 个孔隙连通域,若要处理多个孔隙区域,则需多次提取再叠加得到最终结果。
图18为上述3种算法的分割结果对比情况。其中:第1 行从左到右分别为第1 帧、第15 帧、第30 帧具有真实孔隙标签的原图;第2 行从左到右分别为采用阈值分割算法对第1 帧、第15 帧、第30 帧图像进行分割得到的结果,该结果通过手动选择提取灰度值为0~43 和111~255 的区域获得;第3 行从左到右分别为采用文献[10]算法对第1 帧、第15 帧、第30 帧图像进行分割得到的结果,具体分割过程为:分别手动标记5 个孔隙区域的轮廓(见图18 第3 行左起第1 张图),由于每次只能提取1 个孔隙区域,将5 次运行算法得到的区域叠加得到最终分割结果,区域灰度权重a=0.5,区域面积权重b=1,结构元半径为5。图18第4行从左到右分别为采用本文算法对第1 帧、第15 帧、第30 帧图像进行分割得到的结果。
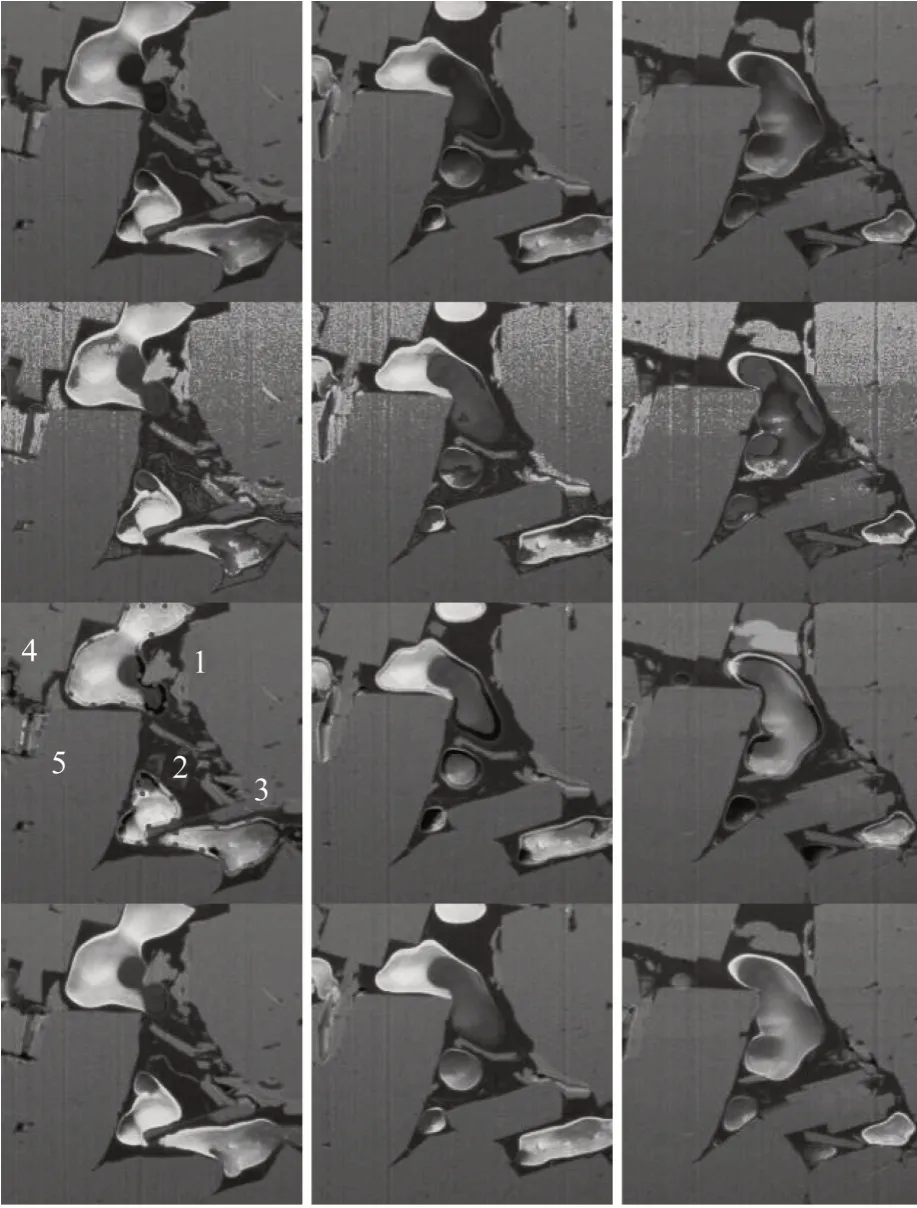
图18 本文算法与传统分割算法分割结果对比Fig.18 Comparison of segmentation results between the proposed algorithm and traditional segmentation algorithms
由图18 可以看出:传统阈值分割算法得到的孔隙有高光现象,孔隙暗部与基质灰度相差不大且FIB-SEM图像整体灰度不均,会同时提取孔隙和基质,无法对孔隙进行有效提取;文献[10]算法对初始几帧序列图像分割效果较好,但无法精确分割孔隙边缘及细长孔隙区域,且对序列图像中逐渐分离为两部分的孔隙(见图18 第3 行左起第2 张图下方2 个孔隙),无法跟踪其变化并分割,同时基于边缘信息判断轮廓变化,未考虑目标区域的灰度特征信息,造成在后续序列图像中将基质边缘误判为孔隙边缘而进行过度分割(见图18第3行左起第3 张图顶部),且随着序列图像的变化,被误判为孔隙区域的轮廓会不断扩大,导致无法正确提取孔隙,因此,文献[10]算法只能有效提取少量序列图像中相对变化不大的孔隙;本文算法采用卷积神经网络进行端到端的孔隙分割,无需手动标记,可有效分割出孔隙区域,并实现较细小孔隙区域的完整分割,孔隙分割精度高于传统分割算法。
表3 为3 种算法对每张图像的运行时间以及所得MIoU 值的对比情况。其中,文献[10]算法将提取1 个孔隙的平均时间作为分割每张图像的运行时间。可以看出:文献[10]算法由于使用主动轮廓算法寻找孔隙边缘并利用形态学进行后处理,因此运行时间较长;本文算法使用卷积神经网络对每个像素点进行分类,在很大程度上缩短了运行时间。
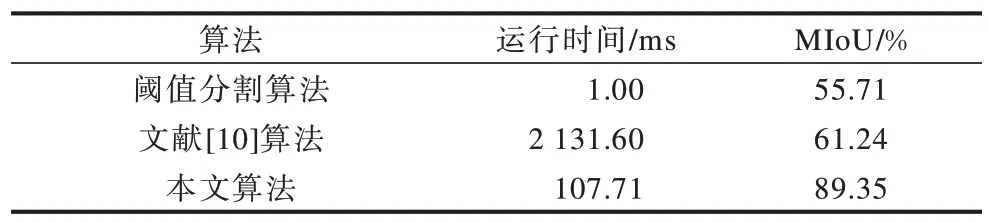
表3 3 种算法的实验结果对比Table 3 Comparison of experimental results of three algorithms
3.7.2 本文算法与主流分割算法的对比
将本文算法与PSPNet[23]、SegNet[26]、FCN-8s[11]、U-Net[12]、RefineNet[27]、BiseNet[28]以及DeeplabV3+[13]等主流分割算法的分割精度进行对比。其中,FCN-8s和SegNet采用VGG-16 作为主干网络,PSPNet 和RefineNet 采用ResNet50 作为主干网络,DeeplabV3+采用xception 作为主干网络。
图19 和图20 分别为本文算法与上述主流分割算法对岩心FIB-SEM 图像数据集中第30帧和第70帧图像的分割效果对比(红色区域代表真实标签,黄色区域代表预测正确的孔隙区域,绿色区域代表预测为孔隙但实际为背景的区域,彩色效果参见《计算机工程》官网HTML 版)。
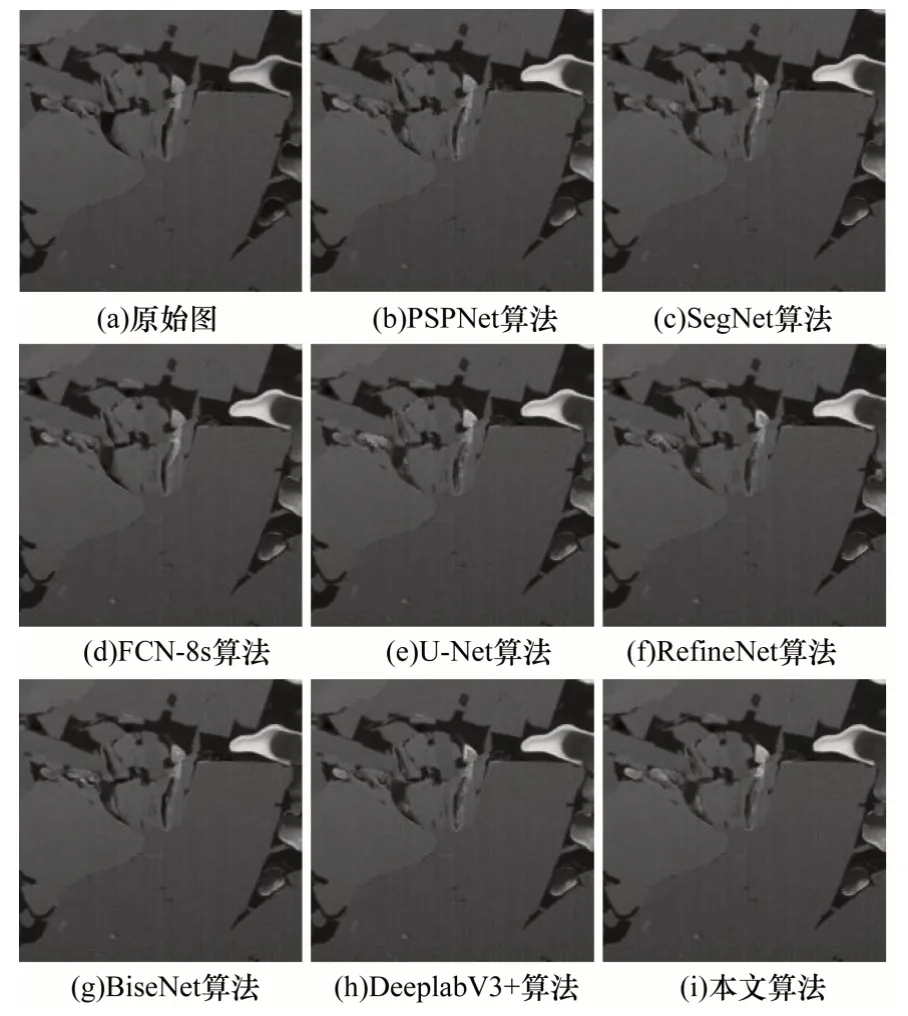
图19 不同算法对第30 帧图像的分割效果Fig.19 Segmentation effect of different algorithms on the 30th frame image
由图19 可以看出:PSPNet、SegNet、FCN-8s、RefineNet 和BiseNet 算法对于小目标分割效果较差,未提取出图像中左侧和中部细长的孔隙;U-Net 算法对大孔隙中与基质灰度值接近的区域分割不准确;DeeplabV3+算法采用ASPP 模块对细节分割较准确;本文算法由于采用注意力模块并在使用亚像素卷积模块进行上采样,因此对于小目标提取精度更高,可获取更准确的目标边缘。由图20 中各分割算法对左侧孔隙下方和中部孔隙下方的分割结果可以看出,本文算法对细节部分的分割精度更高。
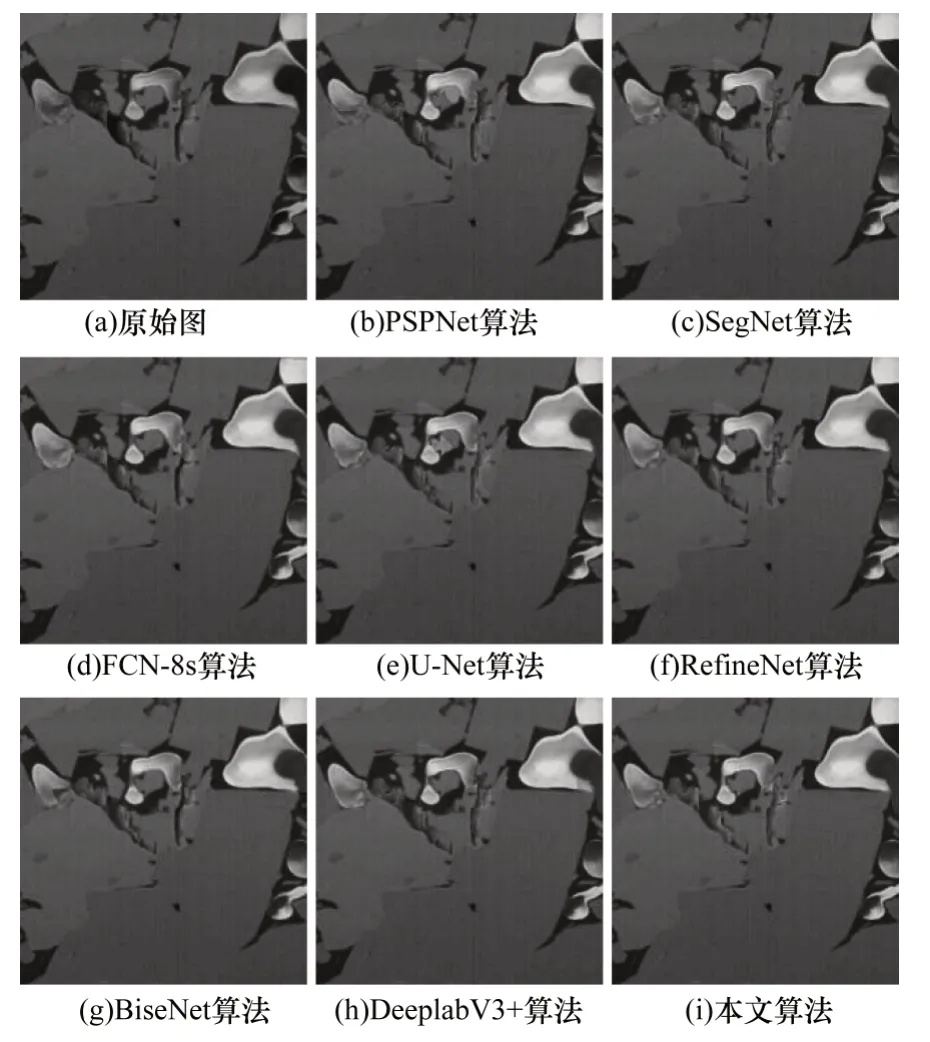
图20 不同算法对第70 帧图像的分割效果Fig.20 Segmentation effect of different algorithms on the 70th frame image
将本文算法与上述主流分割算法所需的参数量与运行时间进行对比,结果如表4 所示。本文算法因为加入了注意力模块和金字塔模块,所以参数量要多于U-Net、PSPNet、SegNet 和BiseNet 算法,而金字塔模块使用多个小卷积核级联代替原卷积核,因此本文算法参数量少于FCN-8s 算法。在运行时间上,为得到更精确的结构,本文算法运行时间比U-Net、SegNet 和BiseNet 算法更长,但引入亚像素卷积模块进行上采样,在一定程度上缩短了运行时间。表5 为本文算法与上述主流分割算法的实验结果对比。可以看出,本文算法可对孔隙区域进行精确分割,其评价指标值均高于其他主流算法。
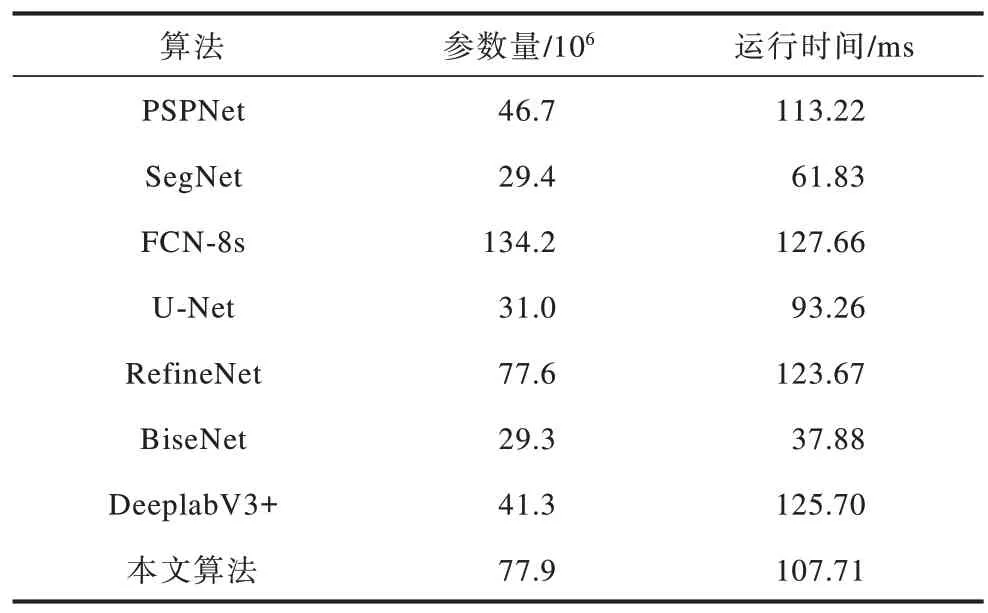
表4 不同算法的参数量与运行时间对比Table 4 Comparison of parameter quantity and running time of different algorithms
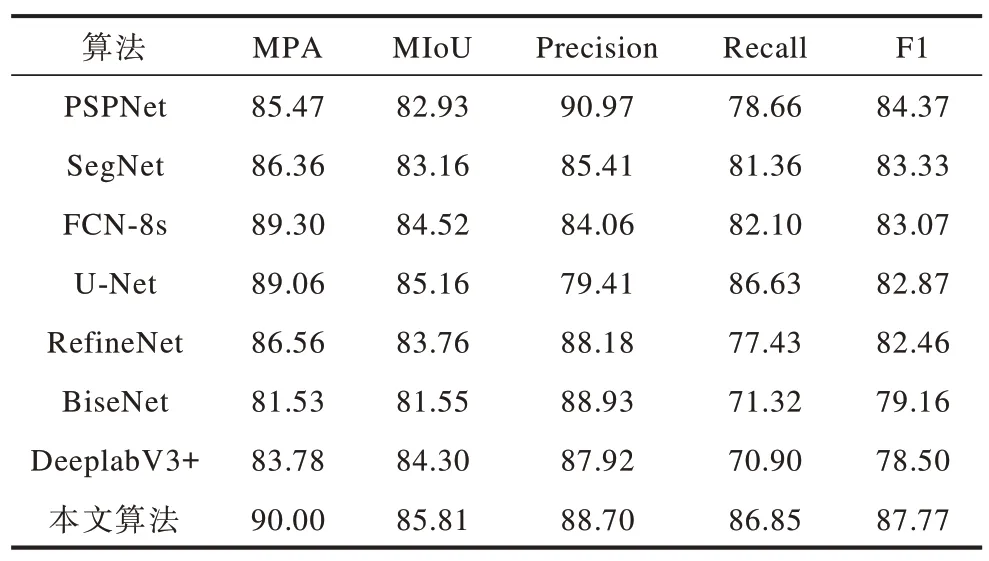
表5 不同算法的实验结果对比Table 5 Comparison of experimental results of different algorithms %
4 结束语
针对传统岩心FIB-SEM 图像分割算法提取孔隙需人工标记且分割精度较低的问题,本文提出一种利用卷积神经网络的端到端图像分割算法。采用光流法与分水岭分割图像标注法构建岩心FIB-SEM 数据集,将残差通道注意力模块、多尺度空间注意力模块以及特征金字塔模块嵌入分割网络并采用亚像素卷积模块进行上采样。实验结果表明,和阈值分割算法、基于主动轮廓的岩心FIB-SEM 图像分割算法相比,该算法分割结果更精准且无需人工操作。然而本文算法引入复杂的注意力模块与金字塔模块导致网络参数量较大且计算效率不高,后续将引入轻量级卷积网络,进一步提高计算效率与分割精度。
猜你喜欢
小雪花·成长指南(2022年1期)2022-04-09
矿产综合利用(2020年1期)2020-07-24
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
化工管理(2017年23期)2017-09-11
传媒评论(2017年3期)2017-06-13
中国神经再生研究(英文版)(2016年8期)2016-12-01
第二课堂(课外活动版)(2016年2期)2016-10-21
当代化工研究(2016年2期)2016-03-20
天然气与石油(2015年2期)2015-02-28
油气地质与采收率(2014年6期)2014-12-16
