
自重构模块化机器人模块设计综述
2021-01-16 02:51戴野张启昊高语斐齐云杉王建辉
哈尔滨理工大学学报 2021年5期
戴野 张启昊 高语斐 齐云杉 王建辉









摘要:自重构模块化机器人是指通过一种或多种模块组装而成,能根据工作环境的变化重构为另一种构型的机器人,具有操控范围广、结构可变、功能简单易扩充等优点,现已成为学术与工业领域的研究热点。为了探讨近年来自重构模块化机器人模块设计的研究进展,对国内外已有代表性成果的模块结构进行整理,从同构与异构、串联式与阵列式两方面对自重构模块化机器人进行分类,并在此基础上分析了研究中存在的主要问题,提出可能的发展方向并对以后的研究作出展望。
关键词:机器人;重构;模块;同构;异构;串联式;阵列式
DOI:10.15938/j.jhust.2021.05.005
中图分类号:TP242 文献标志码:A 文章编号:1007-2683(2021)05-0034-10
0 引言
机器人是当今社会发展的一个热点,随着科技的不断进步,机器人将越来越多地应用于工业及非工业领域中,逐步取代入类完成各种冗杂繁琐、危险度高的工作。机器人可以在不同的环境中进行简单的重复劳动,效率高,完成度好,极大地提高了工业及生活等领域的运转效率[1-2]。但随着工作环境日益复杂以及目标任务逐渐多样化,传统机器人的局限性逐渐凸显出来。由于机器人的可靠性能,其越来越多地应用在非结构环境下,但是在这种环境中存在着不可预料的突发情况,研发人员也很难事先确定机器人的作业任务。功能固定,无法应对环境与任务的变化成为传统机器人的限制。为提高机器人的环境适应能力,设计能够满足不同任务需求的自重构模块化机器人,对工业领域的发展具有重要意义[3-7]。
1 自重构机器人模块的设计理念
目前传统的机器人,如工业机械臂和仿生机器人等,大都针对特定的应用目的和场合,对某个或某些特定任务需求进行整体设计,功能比较单一。并且这些机器人都是在受控环境下运行工作的,环境的任何变化都会导致机器人操作出现问题,从而增加了在工业中的平均资源消耗。机器人设计的下一阶段是从模块化单元组装的角度出发,提高安装、维修、更换、控制等方面的便捷性,研究人员在开发的后期引入了自动化、自愈、重构等概念,创造了自重构模块化机器人[8]。自重构机器人模块的结构决定了机器人之间的连接方式及其可靠性,影响着机器人的构型决策,重构后的运动方式、运动误差,以及功能实现的可靠度。因此,模块的设计是自重构机器人设计的基础[9]。
对于自重构机器人模块结构的设计,可从两方面进行分类:
一是从模块构型上可分为同构模块设计与异构模块设计。同构即机器人构型由同种模块组成,同构机器人的模块通常设计为具有多种自由度与多个连接面,包括不同角度的旋转,这种设计是为了在组成构型时易于连接与运动;异构即机器人构型由n类模块型组成(其中n≥2),异构机器人的模块种类较多,每种模块有各自的功能,因此自由度个数与连接面个数都不相同,通常包括连接模块、功能模块与旋转模块。异构机器人设计之时便具有相应的针对性,为适应某些特定功能的场景,牺牲了一定程度的互换性和通用性。因此,在已有的典型自重构机器人原型中,大多数采用了同构方式。
二是从模块内部运动副配置上可分为串联式模块和阵列式模块两种结构类型。串联式模块一般不具有规则的外形设计,模块内置运动副,其重构后可实现超冗余链式构型,依靠模块间的灵活结合形式,可以完成抓取、蛇形、环形等链式结构,对不确定性环境有更强的适应能力。阵列式模块一般具有规则的立方体或者六面体结构,运动时以整数倍的自身体积进行移动,该运动方式便于使用计算机语言表达,模块运动路径中邻居模块的位置和状态、模块单元移动方案中不同时刻的具体位置可根据模块几何外形进行空间划分和计算机语言描述。相對的,串联式模块机器人由于模块外形和关节的连续运动,为模块空间位置的计算和描述带来了困难,不便于在计算机中进行建模和描述[10]。
2 模块设计的研究进展
2.1 串联式同构模块设计的研究进展
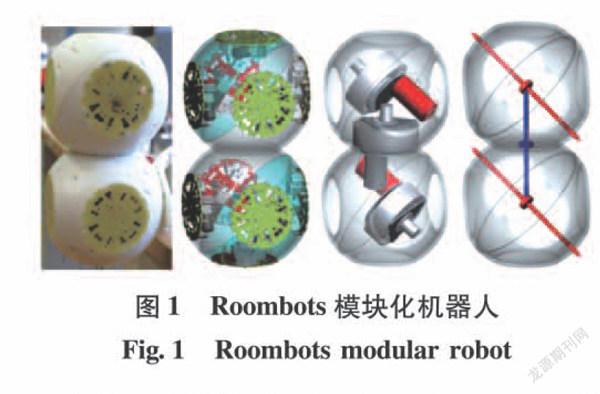
瑞士的Alexander Sproewitz等人设计了一种用来作为家具积木的模块化机器人Room bots(R8)[11],如图1所示。RB的每个模块都有3个自由度,可以连续旋转,没有关节的限制,具有非常高的灵活度,同时每个接头的斜式滑环允许电力传输和通信。但是该单元模块没有独立运动能力,重构变形运动需在固定的底座上进行。
丹麦技术大学提出了一种名为ATRON的双子型模块[12],如图2所示。这种模块由相互对称的两部分组成,运动方式为中心铰接型,这种模块化机器人的自重构过程由模块内部两子模块间的相对旋转实现,以模块的中心为旋转中心,子模块间能发生相对旋转,模块间通过机械挂钩的伸出与收回实现连接或分离。同时还提出了一种采用分布式控制策略的模块化机器人运动在线学习策略,该种策略在可实现性、可重构性、可伸缩性和生物合理性等方面更具有优势[13]。
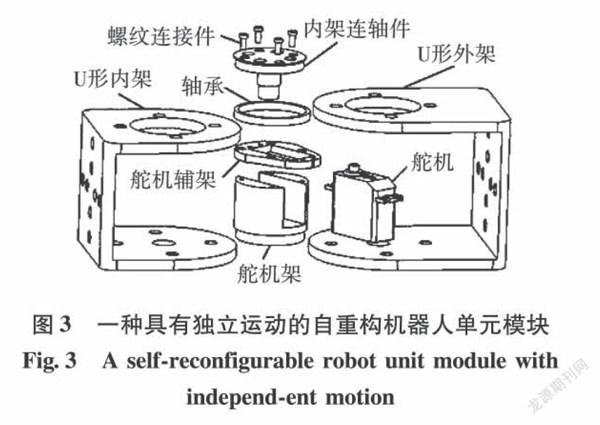
天津理工大学葛为民等人研制了一种自重构机器人模块,可实现机器人的独立运动[14],如图3所示。该机器人的单元模块具有1个自由度,能通过U型外架和U型内架实现3600的旋转动作;其结构还包含1个主动对接装置和5个被动对接装置,主动对接装置可通过4个钩爪实现与其他模块的对接动作,并完成位置姿态的修正。该单元模块具有独立运动能力且非常灵活,并可通过不同重构方式实现不同构型的转换[15]。
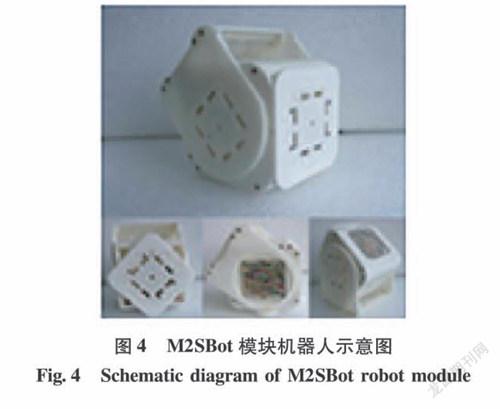
河北工业大学的王晓峰等人设计了一种mobilemodular self-reconfigurable robot(M2 SBot)模块机器人[16],如图4所示。其主要由两个U块和一个旋转轴组成。这两个U块的形状不同,分为外U框架和内U框架。内U框架可以围绕旋转轴独立旋转±90°,并且用于与其他模块的主动连接面对接。两个模块对接的过程中,当距离在0.3m时,通过模块上的红外传感器引导模块相互靠近,当距离小于30mm时,可通过磁铁吸引来补偿对接误差。在达到设定距离后,关闭红外传感器,步进电机由启停机构控制,通过微动开关对连接面进行对接,最后由一套基于正弦加速的槽型自动对接锁紧机构完成锁紧,实现模块对接重构。
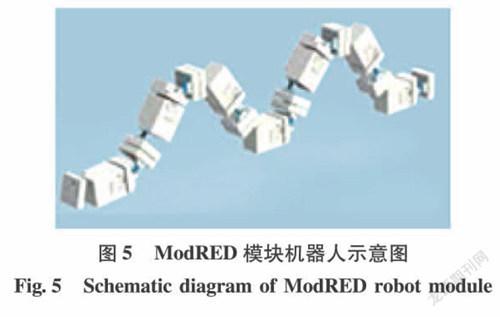
美国的内布拉斯加大学研制了一种ModularRobot for Exploration and Discovery(ModRED)机器人模块[17-18],如图5所示。其主要应用于城市搜救和探索未知环境。该机器人模块的连接面上共安装有4对红外发射器和接收器,用以实现近距离传感、定位和局部通信。ModRED机器人模块具有4个自由度,2个主连接面和2个侧连接面,便以重构成更多的构型。
中国矿业大学的刘建功研制了一种名为E-MERGE的第二代模块化机器人[19],如图6所示。该模块结构为长方体,具有4个连接面。与其他模块不同的是,模块间通过高频电磁进行连接,这种电磁连接工作方式具有简单快速等特点。模块内的电机具有一个自由度。第二代EMERG模块机器人采用集成分布式和集中式控制方式,具备环境感知能力。由于模块增加了主控芯片,该主控芯片具有控制器局域网络的功能,同时还增加了控制模式切换单元与通信信号,因此第二代EMERG模块间就可以实现自由通信,还可以灵活切换控制方式[20]。
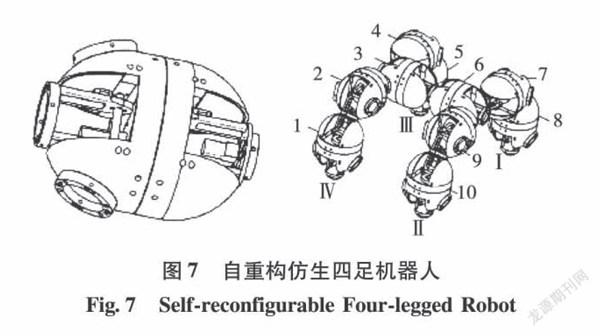
福州大学的陈刚等人设计了一种自重构仿生四足机器人[21],如图7所示。这种模块化机器人具有3个自由度,模块的结构大小为150mm×110mm×110mm,由单元模块机体结构与连接结构组合而成。机体结构可以实现上摆70°,下摆70°,中间旋转360°的结构运动,且这3个自由度的运动互相独立。连接结构包括主动连接面与被动连接面,可以安装在任意摆杆上,通常被动连接面与下摆杆通过插销式连接,主动连接面与上摆杆通过插销式连接。
哈尔滨工业大学的赵思恺等人研发了一种模块化可重构外肢体机器人[22],如图8所示。该机器人的单元模块由两个完全相同的等腰直角三棱柱子模块组成,每个子模块都具有一个回转平面与一个连接平面。回转平面用于实现模块间的连接转动,不同子模块的回转平面互相重合,依靠磁性实现相邻模块的快换连接。两个子模块成中心对称分布,可以绕公共转动轴进行-180°~180°的相互旋转。连接平面用于模块单元之间的连接。
南开大学的朱威等人设计了一种可重构模块化蛇形机器人[23],如图9所示。该机器人包括头部模块与身体模块,头部模块只有一个偏航关节,身体模块同时包含偏航和俯仰关节。连接时前一模块尾部的钩爪通过挡板的孔洞与后一模块的插销啮合,完成主动连接。
2.2 阵列式同构模块设计的研究进展
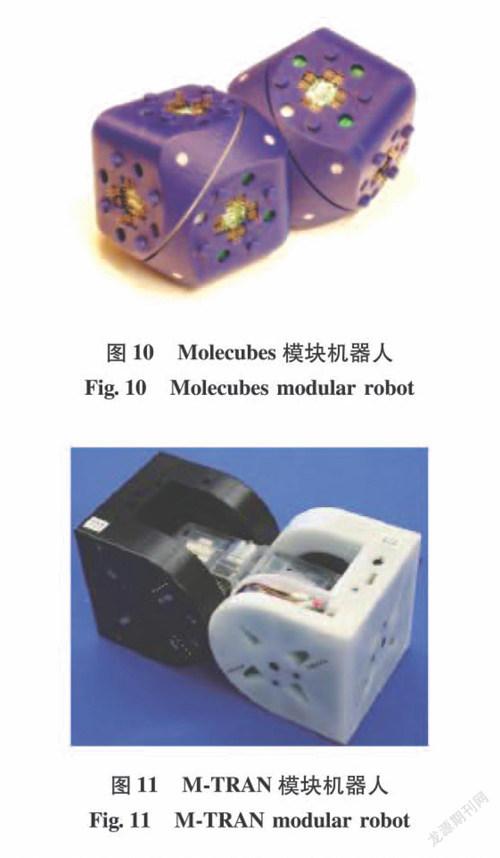
美国康奈尔大学研制了一种名为Molecubes的模块,如图10所示。该模块外形均为正方体,每个模块均可被分割为两部分,分割线为对角线。每个部分均具有三个连接面,通过位于中心的旋转自由度连接。Molecubes模块已经发展到了第二代,第一代Molecubes模块需要不断供电来维持工作,因而只能在地面固定的底座上进行运动;而第二代Molecubes模块采用了机电结合式的连接机构,这种设计可以更灵活的实现重构,但两代模块均没有独立运动能力[24-25]。
日本的产业技术总合研究所研制并开发了一种名为Modular Transformer(M-TRAN)的双子型模块[26],如图11所示。这类模块既可以通过连接或断开相邻模块来形成复杂的链式或晶格式系统,还可以独立成小的机器人分别进行协调运动。相比于其他模块设计,具有更为强大的灵活性与运动能力。每个M-TRAN模块单元具有2个旋转自由度和对称分布的六个连接面。该机器人模块已经研制到第3代模型,M-TRAN的第1代和第2代模块的连接装置采用内平衡磁铁原理,M-TRAN的第3代模块结构的连接装置采用由微型电机驱动的钩爪式结构[27]。
哈尔滨工业大学的赵杰等人研制了一种Uni-versal Robot(Ubot)单元模块[28],如图12所示。该单元模块主要采用万向式的正方形立方体基本结构,这种万向式结构可以使每个模块都能灵活地完成重构与协调运动。每个模块均具有两个转动自由度和四个连接面,每个转动自由度可在士900的范围内绕直角轴转动。同时该主模块的硬件连接控制机构为两个钩爪,采用钩爪式的设计可以灵活实现两个模块之间地连接与断开。但该单元模块也不具有独立运动能力[29]。
麻省理工学院设计了一种名为Momentum-driv-en Modular Robots(M-Block)的单元模块[30],这种模块具有自主移动的能力,如图13所示。在模块内部设有飞轮用于存储角动量,制动机构对飞轮减速,并在短时间内对模块施加大扭矩,当扭矩足够大,模块就会打破它和周围的磁键,转到一个新的位置,从而实现自主移动。单个模塊可以通过这种旋转移动在非结构化环境中自主移动,也可以在由相同模块组成的三维网格上移动,还可以在平面上实现所需的轨迹或向其他平面进行凸凹过渡。2019年,麻省理工学院推出了升级后的机器人M-Blocks 2.0版本,各模块化机器人之间通过类似条形码的微型通信系统相互识别,从而配合完成简单任务[31]。
哈尔滨工业大学的朱延河等人设计了一种Ser-emo机器人[32],如图14所示。Seremo机器人的每个模块都是一个完整的结构,自带传感器、执行器、处理器、电池和通信手段,与其他机器人模块相比,其可以像车轮系统一样运动,实现二维平面的位移。Seremo机器人通过齿轮机构控制车轮的转向,并增大了回转面积,使其可以准确的变换所在位置,完成重构,模块之间依靠八个磁铁实现连接。
英国谢菲尔德大学研制出一种名为Hybridmodular robot(HyMod)的自重构混合模块化机器人[33],该模块也是可以实现自主移动,如图15所示。HyMod单元模块具有3个旋转自由度和4个连接器,每个单元可以通过差动轮独立移动,并与其他单元组合形成任意立方晶格结构。连接器通过在其外壳外伸出挂钩来锁住相反连接器的挂钩,从而完成连接。HyMod机器人具有自行组装能力与高效的模块移动性,可以在可重构制造、搜索和救援以及空间探索领域使用。
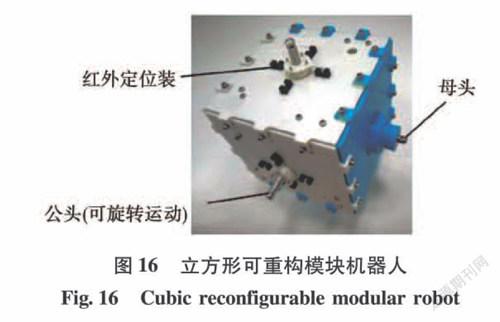
上海交通大学的刘开元提出了一种立方形可重构模块化机器人[34],如图16所示。这种模块为正方体结构,每个面上都有一个连接接口,相对面上的两个连接口是不同的,一个为主动连接口即公头,另一个为被动连接口即母头。当两模块对接时,公头旋转,同时公头与母头周围安装有四个红外定位装置用于调整位姿,推动母头与公头完成对接。该立方体模块同样无法实现独立运动,因此还设计了特殊基座,基座上均布有母头,可以连接、支撑模块以确保模块稳定对接。
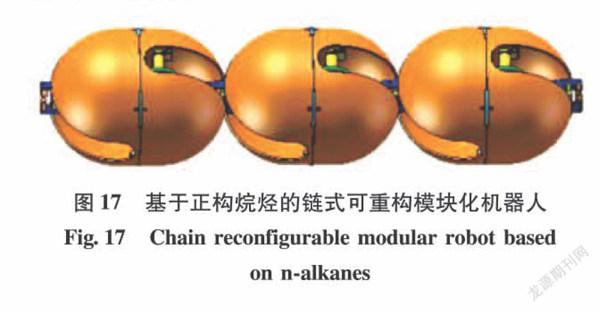
中国科学院沈阳自动化研究所受到烷烃结构的启发,研究了一种基于正构烷烃的链式可重构模块化机器人[35],如图17所示。甲烷间的连接可以看作是两个正交运动的机构,由此可将模块化机器人的模块单元设计为四自由度。根据化学键的形成原理,模块单元的连接接口采用卡口连接方式,由两个接口交互完成。
2.3 串联式异构模块设计的研究进展
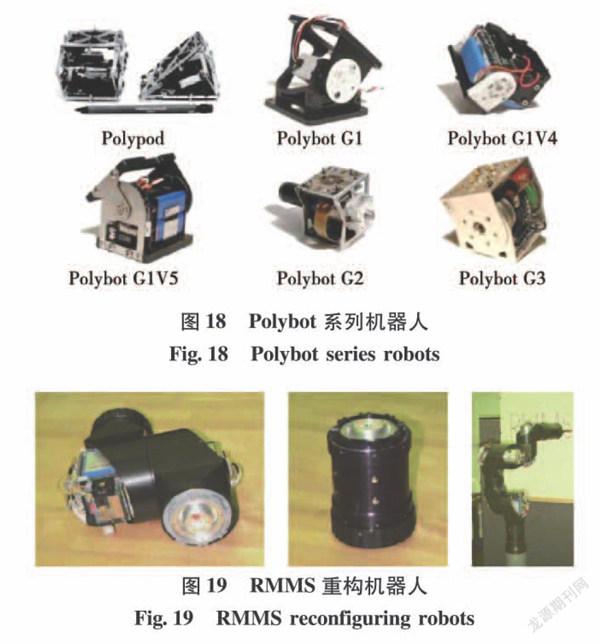
美国加利福尼亚州帕洛阿尔托研究中心研制出了一种PolyBot可重构机器人[36-37],如图18所示。该机器人由体节模块和节点模块两种模块组成。体节模块具有1个旋转自由度,由铰接的关节实现;节点模块为六面体结构,每个面能够与其他模块对接。该机器人模块的对接方式采用雌雄异体的轴孔式对接方式,并通过记忆合金的变形形成固定连接[38]。
Carnegie Mellon大学研发的Reconfigurablemodular manipulator system(RMMS)重构机器人[39]由转动关节模块和多种尺寸的连杆模块组成,如图19所示。转动关节模块由直流伺服电机驱动,接口分为公接头和母接头两种,通过接头的配对实现与其他模块的快速连接。RMMS不仅实现了机械结构的可重构性,而且实现了电气、控制系统软、硬件的可重构性。其中,控制系统软件运行在Chimera实时操作系统上,并采用基于VME的主控制器和ARMbus的局域网实现了模块之间的通讯。
加拿大ESI公司生产的Modular reconfigurablerobot-2(MRR-2)可重构模块机器人[40]如图20所示。其模块化设计思想意味着更容易定制,转动关节模块由永磁直流无刷电机驱动,由谐波齿轮减速器减速和传动,由光电编码器进行位置反馈,并配备有行程开关、零位开关、急停按钮、机械档块等安全装置。不同功率的模块尺寸不同,可应用于不同的场合。
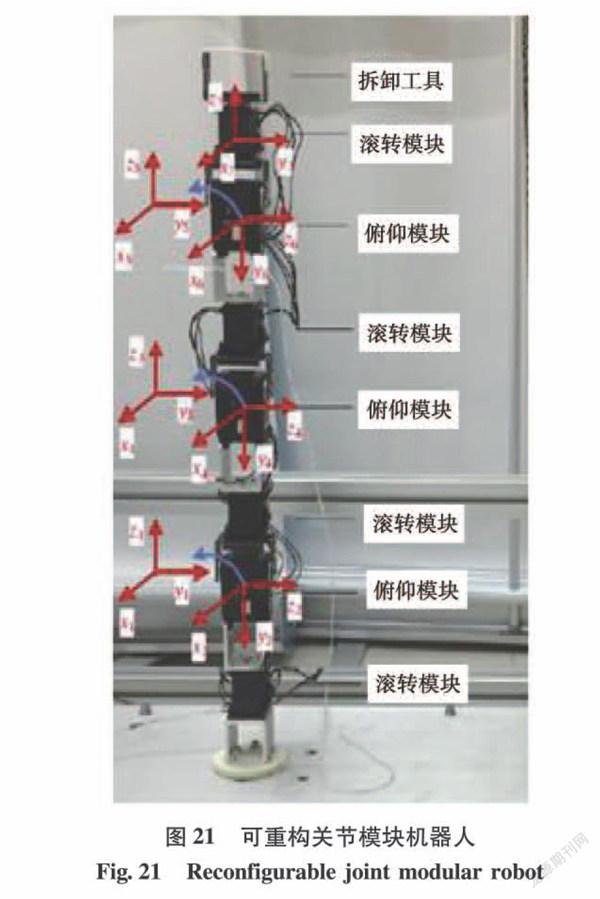
南京航空航天大学的夏颖设计了一种可重构模块机器人[41],如图21所示。将可重构机器人分为几种功能模块:运动关节模块、操作功能模块、连杆功能模块与载荷功能模块。运动关节模块的作用是为机器人实现运动,包含高精度大扭矩和普通类型的俯仰运动模块、滚动运动模块、直线运动模块与偏航运动模块;操作功能模块即为末端操作模块,包括擦拭、通用抓取等功能模块;连杆功能模块起连接与支撑的作用,用于机器人本体的构造,包括支架连杆与结构支撑功能模块,可重构机器人可根据任务需要进行重构组合。
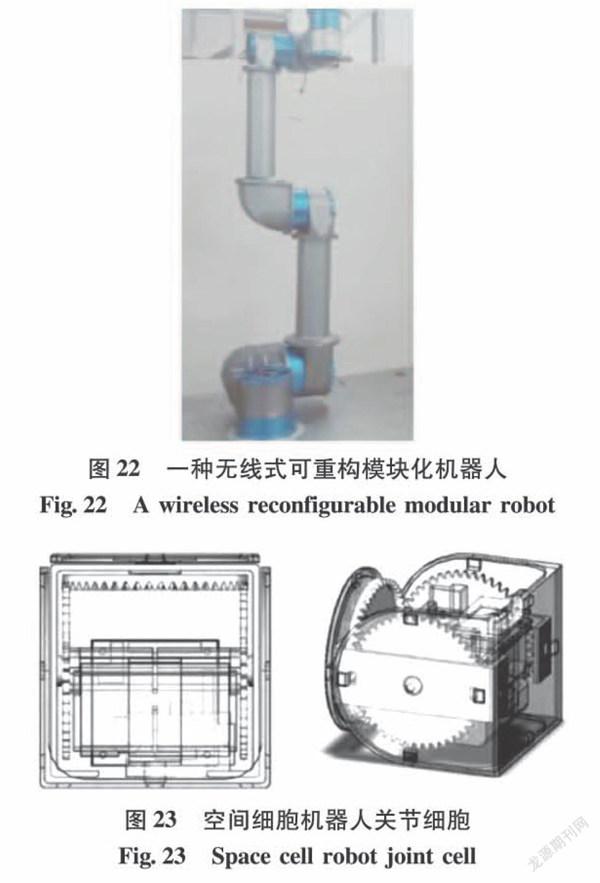
哈尔滨工业大学研发了一种无线可重构模块化机器人[42],如图22所示。该可重构机器人是由一个拟人化的七自由度机械手、一个可重构连接机构和一个无线控制器组成。每一个关节模块的内轴通过深沟球轴承支撑,其接头处将钢轮、弹性轮、谐波发生器分离来进一步减小接头的尺寸。该机器人的外部零件用螺钉组装在一起,并用锥形销定位,以防止旋转产生间隙,其输出部件由单个十字滚子轴承支撑,减轻了重量,提高了关节的旋转精度。
2.4 阵列式异构模块设计的研究进展
哈尔滨工业大学的赵阳等,在模块化自重构机器人的基础上,结合Cellular robotic system(CEBOT)的概念,提出了建立在全新系统化体系之下的空间细胞机器人系统[43],并给出了三种细胞的结构设计。他们提出,细胞是空间细胞机器人的最小组成单元,大致分为:关节细胞、功能细胞与间质细胞。这种空间细胞机器人利用仿生学原理将重构过程分为四个层次,即细胞、组织、器官至机器人,同时将多层次重构理念运用于个,这样的设计可以使得对单一模块种类的需求减少又提高了构型的多样性。其关节细胞如图23所示。
图22 一种无线式可重构模块化机器人
赵阳对空间细胞机器人的系统进行完善后,哈尔滨工业大学的曹恩梽提出了空间细胞机器人的仿真模型并对其自组装运动过程进行了研究[44]。该模块采用了基于模型开发的设计流程,设计出了间质细胞模块与关节细胞模块的结构。间质细胞模块由底部两个主动轮进行驱动,依靠底部的万向轮维持整体的平衡,通过两个主动连接面与两个被动连接面來与其他模块进行重构。关节细胞模块依靠两个直齿渐开线齿轮与锥形齿轮啮合进行驱动,通过四个被动连接平面来与其他模块进行重构。同时在连接面的设计上进行了创新,采用了舵机、凸轮与弹簧管的组合,连接时舵机的动力转换为凸轮的行程,从而使得弹簧发生形变以完成主动的连接动作。这样设计可以避免太空中失重或磁场紊乱对连接过程的影响,同时可以吧连接过程中的误差控制在10mm内。其间质细胞模型与关节细胞模块如图24所示。
大型空间桁架结构是大型空间飞行器的重要组成结构,在大型空间任务中起到构建、延展、固定支撑等重要作用,因此空间细胞机器人必须具有在桁架上攀爬移动的能力以完成桁架的组装。哈尔滨工业大学的游斌弟团队在空间细胞机器人系统的基础上,结合在轨攀爬任务的需求提出了几种细胞单元[45],并对其进行了基本描述。根据在轨桁架攀爬与组装的要求,设计了连接细胞L、转动细胞B以及末端执行器细胞S(攀爬时通常为手爪细胞),每个细胞的连接面均有一个旋转自由度。这三种细胞的构型表达如图25所示。
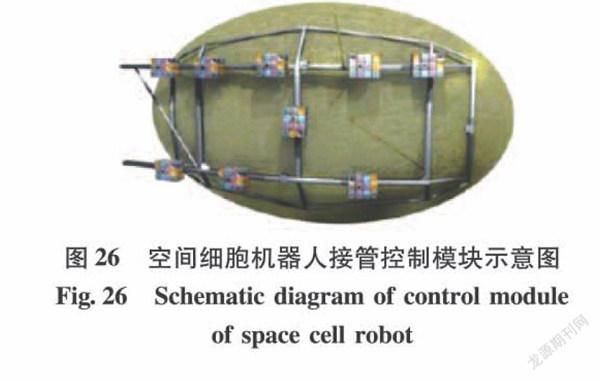
西北工业大学的黄攀峰团队将细胞机器人的概念运用到了卫星中,在细胞卫星概念的基础上,对其结构与接口两部分问题进行了阐述[46-48]。如图26所示,该卫星的设计理念主要为将卫星按照功能进行子系统拆分,拆分后的部分设计为具有标准接口的细胞,以便于进行组装。
3 自重构模块化机器人发展中的关键问题及未来展望
自重构模块化机器人是机器人研究领域新兴的研究方向,也是机器人研究领域的热点和难点。近年来,随着模块化自重构机器人从最初的概念设计发展到物理样机和物理产品在工业领域的应用,这一过程经历了众多研究者的研究和优化[49]。自重构模块化机器人结构的多样性和灵活性引起了越来越多学者的关注和研究,成为21世纪机器人研究的重要方向,
目前,自重构模块化机器人的实际应用还有很长的路要走。需要面对许多间题和挑战。未来,自重构机器人的模块设计需要解决以下问题:
1)自重构模块化机器人主要由单元模块组合而成。随着单元模块尺寸的逐渐减小,势必带来功能实现、能源供应等问题。因此,如何解决模块设计和性能平衡问题将是未来自重构模块化机器人研究的一个重要方面。
2)面对不同的任务需求,如何实现模块的快速设计,建立一种行之有效的模块设计系统,将功能实现与基本模块构型相对应,是今后自重构机器人研究的一大方向。
3)模块化思想不彻底,不能对模块的功能表达与结构设计进行充分“降解”、“减负”。
4)同构机器人模块完全相同,但首、末端模块所需要的驱动是不同的,这就造成了驱动能力的浪费,并且自重构机器人多次重构后,安装误差会相应增加,这必然会对运动精度产生影响。
依靠自重构模块化机器人灵活的自主变形能力与工作特性,越来越多传统机器人无法解决的问题将被克服。除了传统的制造业,其将更广泛的应用于非结构性环境中的消防救援、军事侦察、海洋侦察、军事和其他领域,并且随着我国航空航天事业的发展,各科研高校机构的不断深入探索,未来自重构模块化机器人将更多应用于空间在轨装配、表面检测、空间机械手、快换接口等工作。因此,未来很长一段时间,自重构模块化机器人的研究将为航天工业的应用而展开,具有重要的现实意义。
4 结论
本文综述了自重构模块化机器人不同类别模块的结构设计特点。同构机器人的优点为模块的结构设计与重构过程的运动控制较为简单,但因为机器人由同种模块构成,因此可形成的构型有限且难以实现多层次重构,从而导致不能完成很多复杂的任务。而异构机器人可以重构为实现多种复杂任务的机器人,且具有面向任务的构型策略,具有可实现功能多的优点,但重构、运动控制更为复杂。串联式模块依靠模块间的灵活结合形式,可以完成抓取、蛇形、环形等链式结构,对不确定性环境有更強的适应能力,但不便于在计算机中进行建模和描述。阵列式模块运动时以整数倍的自身体积进行移动,便于使用计算机语言表达,但更受环境因素的限制。
总的来说,随着自重构模块化机器人模块多样化的设计、工业环境下实验的完成,自重构机器人将在更多领域得到广泛的应用。
参考文献:
[1]田闯.工业机器人的现状及发展趋势研究[J].中国管理信息化,2019,22(20):156.
[2]TIMOTHED L,VINCENZO L,ANDREI S,et al.Continual Learn-ing for Robotics:Definition,Framework,Learning Strategies,Op-portunities and Challenges[J].Information Fusion,2020,58:52.
[3]周建平.我国空间站工程总体构想[J].载人航天,2013,19(2):1.
[4]陈森.空间细胞机器人自重构过程研究[D].哈尔滨:哈尔滨工业大学,2017.
[5]刘明尧,谈大龙,李斌.可重构模块化机器人现状和发展[J].机器人,2001(3):275.
[6]TANG L,WANG JS,LIAO J,et al.Current Status and FutureTrends of Robotics:Literature Review[J].Scientific Journal ofIntelligent Systems Research,2021,3(8):167.
[7]夏平,朱新坚,费燕琼.一种新型的自重构模块机器人[J]上海交通大学学报,2006(3):431.
[8]唐聪.细胞机器人转动与连接单元结构设计[J].石河子科技,2021(1);33.
[9]陈维.模块化自装配机器人的系统设计与研究[D].哈尔滨:哈尔滨工业大学,2020.
[10]别东洋.模块化自重构机器人分布式变形策略研究[D].哈尔滨:哈尔滨工业大学,2017.
[11]ALEXANDER S,AUDE B,PIERRE D,et al.Roombots-Me-chanical Design of Self-Reconfiguring Modular Ro-bots for Adap-tive Furniture[C]//2009 IEEE International Conference on Ro-botics and Automation,2009:4259.
[12]CHRISTENSEN DJ,SCHULTZ UP,STOY K.A Distributed andMorphology-independent Strategy for Adaptive Locomo-tion in Self-reconfigurable Modular Robots[J].Robotics and Autonomous Sys-tems,2013(61):1021.
[13]刘永进,余旻婧,叶子鹏,等.自重构模块化机器人路径规划方法综述[J].中国科学:信息科学,2018(48):146.
[14]葛为民,张华瑾,王肖锋,等.自重构机器人变形过程运动学分析及越障仿真[J].中国机械工程,2014,25(19):2608.
[15]曹彦彬,孙雪艳,葛为民,等.基于拓扑结构的自重构模块化机器人重构策略的研究[J].天津理工大学学报,2015,5(3):24.
[16]WANG X,ZHANG M,GE W.A Novel Docking Mechanism De-sign and Dynamic Performance Analysis of Self-reconfigurableModular Robot[M].Chain:Springerlnternational Publishing,2016:681.
[17]BACA J,WOOSLEY B,DASGUPTA P,et al.Real-time Distrib-uted Configuration Discov-ery of Modular Self-reconfigurable Ro-bots[C]// 2015 IEEE International Conferenceon Robotics andAutomation(ICRA).Seattle,WA,United States:Institute of E-lectrical and Electronics Engineers Inc,2015:1919.
[18]BACA J,WOOSLEY B,DASGUPTA P,et al.Configuration Dis-covery of Modular Self-reconfigurable Robots:Real-time,Distribu-ted,IR+XBee Communication Method[J].Robotics and Auton-omous Systems,2017,91:284.
[19]刘策越.面向快速测试进化形态的模块化机器人研究[D].北京:中国矿业大学,2018.
[20]刘扬,沙波,刘建功,等.具备分布式控制和环境感知能力的第二代模块化机器人EMERGE[J].科学技术与工程,2019,19(7):120.
[21]陈刚,东辉.自重构仿生四足机器人运动学分析及仿真[J].机械制造与自动化,2021,50(2);95.
[22]赵思恺,李长乐,张宗伟,等.模块化可重构外肢体机器人[J].仪器仪表学报,2021,42(4):218.
[23]朱威,郭宪,方勇纯,等.可重构模块化蛇形机器人研制及多运动模态研究[1].信息与控制,2020,49(L):69.
[24]ZYKOV V,CHAN A,LIPSON H.Molecubes:An Open-sourceModular Robotics Kit[C]//IROS 2007 Self-Reconfigurable Robot-ics Workshop,2007:3.
[25]孫雪艳.自重构机器人单元模块设计及重构策略的研究[D].天津:天津理工大学,2016.
[26]KUROKAWA H,TOMITA T,KAMIMURA A,et al.Self-Recon-figurable Modular-Robot M-TRAN:Distributed Control and Com-munication.Proceedings of the 1st International Conference on Ro-hot Communication and Coordination Table of Contents Athens,Greece,2007:1.
[27]MURATA S,KAMIMURA A,KUROKAWA H,et al.Self-Reconfigurable Robots:Platforms for Emerging Fune-tionality[M],Springer:Embodied Artificial Intelligence,2004:312.
[28]赵杰,庸术锋,朱延河,等.基于万向式关节的模块化自重构机器人[J].机器人,2010,32(5):608.
[29]刘王军.模块化自重构机器人自动对接及分布式协调控制研究[D].哈尔滨:哈尔滨工业大学,2012.
[30]ROMANISHIN JW,GILPIN K,BUS D.M-Blocks:Momentum-driven,Magnetic Modular Robots[C]//2013 LEEE/RSJ Interna-tional Conference on Intelligent Robots and Systems,2013:4288.
[31]张宇.麻省理工研发出微立方体机器人M-Blocks 2.0版本[J].科技中国,2019(12):108.
[32]BIE D,ZHU Y,WANG X,et al.L-systems Driven Self-reconfig-uration of Modu-lar Robots[J].International Journal of AdvancedRobotic Systems,2016,13(5):1.
[33]PARROTT C,DODD TJ,GROB R.HyMod:A 3-DOF HybridMobile and Self-Reconfigurable Modular Robot and Its Extensions[J].Springer Proceedings in Advanced Robotics,2018(6):401.
[34]刘开元.链式可重构模块化机器人设计及重构策略研究[D].上海:上海交通大学,2019.
[35]FENG Jingkai,LIU Jinguo.Configuration Analysis of a Chain-typeReconfigurable Modular Robot Inspired by Normal Alkane[J].Sci-ence China(Technological Sciences),2021,64(6):1167.
[36]ELDERSHAW C,YIM M,DUFF D,et al.Robotics for FutureLand Warfare:Modular Self Reconfigurable Robots[M].Seminarand Workshop,Defence Science Technology Organisation,2002.
[37]YIM M,ZHANG Y,ROUFAS K,et al.Connecting and Discon-necting Forchain Self-reconfiguration with Poly Bot[J].IEEE/ASME Transactions on Mechatronics,2002,7(4):442.
[38]YIM M,SHEN WM,SALEM! B,et al.Modular Self-reconfigu-rable Robot Systems[Grand Challenges of Robotics][J].Robot-ics and Automation Magazine,IEEE,2007,14(1):43.
[39]PAREDIS C.J.J,BROWN H.B.,KHOSLA P.K.A Rapidly De-ployable Manipulator System[J].Robotics and Autonomous Sys-tems,1997,21(3):289.
[40]ACACCIA G.,BRUZZONE L.,RAZZOLI R.A Modular RoboticSystem for Industrial Applications[J].Assembly Automation,2008,28(2):151.
[41]夏颖.空间在轨可重构机器人运动控制技术研究[D].南京:南京航空航天大学,2018.
[42]XU Wenfu,HAN Liang,WANG Xin,et al.A Wireless Reconfigu-rable Modular Manipulator and Its Control System[J].Mechatron-ics,2021,73:102470.
[43]赵航,赵阳,田浩,等.空间细胞机器人系统关键技术及其应用[J].宇航学报,2018,39(10):1071.
[44]曹恩梽.空间细胞机器人自组装中的运动规划研究[D].哈爾滨:哈尔滨工业大学,2018.
[45]游斌弟,温晓雷,刘育强,等.空间细胞机器人面向桁架在轨攀爬步态分析[J].宇航学报,2020,41(5):521.
[46]黄攀峰,常海涛,鹿振宇,等.面向在轨服务的可重构细胞卫星关键技术与展望[J].宇航学报,2016,37(1):1.
[47]常海涛,黄攀峰,鹿振宇,等.空间细胞机器人接管非合作目标时的交互式参数辨识方法[J].机器人,2017,39(2):129.
[48]HUANG PF,WANG DK,MENG ZJ,et al.Adaptive Post-captureBackstepping Control for Tumbling Tethered Space Robot-targetCombination[J].Journal of Guidance,Control and Dynamics,2016,39(1):150.
[49]刘纪东,徐成宇,朱永伟.基于机器人平台的固结磨料工具抛光叶片路径规划[J].金刚石与磨料磨具工程,2021,41(5):95.
(编辑:温泽宇)
收稿日期:2021-02-27
基金项目:国家自然科学基金(52075134);黑龙江省自然科学基金(LH2019E062);黑龙江省普通高校基本科研业务费专项资金(LGYC2018JC040);黑龙江省普通本科高等学校青年创新人才培养计划项目(UNPYSCT-2017077).
作者简介:戴野(1982-),男,博士,副教授,硕士研究生导师;
张启昊(1996-),男,硕士研究生.
通信作者:高语斐(1997-),女,硕士研究生,E-mail:1479966035@qq.com.
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
小学教学研究(2022年5期)2022-04-28
摄影世界(2022年1期)2022-01-21
语数外学习·高中版上旬(2021年7期)2021-11-11
江苏广播电视报·新教育(2021年34期)2021-01-03
小资CHIC!ELEGANCE(2019年36期)2019-11-26
福建基础教育研究(2019年12期)2019-05-28
福建基础教育研究(2019年11期)2019-05-28
福建基础教育研究(2019年10期)2019-05-28
考试周刊(2017年1期)2017-01-20
