
复合式高速直升机过渡模式控制器设计
2021-02-03 11:13江顺陈燕云何伟盛守照
机械制造与自动化 2021年1期
江顺,陈燕云,何伟,盛守照
(南京航空航天大学 自动化学院,江苏 南京 210016)
0 引言
复合式高速直升机是一种区别于常规固定翼飞机和直升机的新型飞行器,兼具常规直升机的垂直起降功能和固定翼飞机的高速巡航能力,具有极大的应用前景[1]。
然而,复合式高速直升机飞行性能大幅提高的同时也加大了控制系统的设计难度。复合式高速直升机具有3种飞行模式:低速模式、高速模式及在低速模式与高速模式间切换的过渡模式。在低速模式和高速模式时可以分别按直升机和固定翼飞机的控制方法进行控制,但过渡模式存在强非线性和控制输入转移等问题,研究过渡模式的控制器设计对实现全包线飞行具有非常重要的意义。
当前,高速直升机过渡模式是国内外的研究热点。文献[2]提出了基于指数权重分配的鸭式旋翼/固定翼飞机的过渡模式控制律设计方法,并经过仿真验证过渡模式的位置、姿态的稳定性。文献[3]提出了一种基于饱和关联lyapunov设计的非线性控制策略,利用该控制律可以在保持飞机飞行高度的同时进行过渡机动。文献[4]采用一种基于李雅普诺夫理论及李雅普诺夫指数趋近律的滑模变结构控制算法提高过渡模式的稳定性,通过试验验证了该控制算法具有更高的鲁棒性和稳态控制精度。
本文采用自适应PID控制应用于复合式高速直升机过渡模式,建立高速直升机气动模型,利用改进的操纵分配方法,结合自适应PID控制器保证过渡模式的安全性和稳定性。
1 复合式高速直升机建模
1.1 样机基本构型
复合式高速直升机采用共轴双旋翼和推进螺旋桨的布局形式,具有直升机和固定翼飞机两种操纵机构。与带机翼的高速直升机不同的是,本文研究对象不设机翼而把机身作为高速飞行的主要升力部件,不足部分由共轴双旋翼提供,同时由推进螺旋桨提供高速前飞动力。
由于其操纵机构的特殊性,复合式高速直升机在3种飞行模式下的操纵系统也有所区别。通过控制总距、差动总距和纵横向周期变距实现低速模式飞行,通过控制升降舵偏转角、差动偏转角、方向舵偏转角和螺旋桨桨距来实现高速模式飞行。在过渡模式下,低速模式操纵机构和高速模式操纵机构均参与操纵分配,由旋翼和机身共同提供复合式高速直升机前飞所需的升力,配合操纵量变化,实现过渡模式飞行。
1.2 动力学模型
复合式高速直升机动力学模型包括上旋翼、下旋翼、机身、平尾和升降舵、垂尾、方向舵及推进螺旋桨。
1)旋翼气动力
与常规直升机相比,复合式高速直升机的上、下两副旋翼转速相同但转向相反,双旋翼之间气动干扰严重,气动特性难度分析较大[5]。双旋翼气动力模型采用叶素理论建模,计算得到上、下旋翼在机体轴系下的力和力矩的分量为:
(1)
(2)
式中:下标1表示上旋翼,下标2表示下旋翼;H、T、S、Mk分别为双旋翼的拉力、侧向力、后向力和转矩;MG、LG分别为俯仰、滚转力矩;x、y、z为旋翼桨毂中心到机身质心的相对距离;δ为旋翼前倾角。
2)机身气动力
文献[6]采用气动系数计算机身气动力和力矩,这里分别用CDf、CLf、CSf、Cφf、Cψf、Cθf表示机身阻力系数、升力系数、侧力系数、滚转力矩系数、偏航力矩系数和俯仰力矩系数。机身气动力与力矩为:
(3)
式中:lf为机身长度;qf为机身来流动压;Af为机身截面积。
3)平尾和升降舵气动力
平尾的升力和阻力分别表示为
(4)
式中:qh为来流动压;kh为平尾动压损失系数;Clh为平尾升力系数,是与平尾迎角、升降舵偏转角有关的函数;Cdh为平尾阻力系数,是与平尾迎角、平尾来流速度有关的函数;Ah为平尾截面积。
升降舵的升力可表示为
(5)

4)垂尾和方向舵气动力
垂尾的升力和阻力可由垂尾处的速度、迎角计算得到
(6)
式中:qv为来流动压;kv为平尾动压损失系数;Clv为垂尾升力系数,是与垂尾迎角、方向舵偏转角有关的函数;Cdv为垂尾阻力系数,是与垂尾迎角、来流速度有关的函数;Av为垂尾截面积。
方向舵产生的升力可表示为
(7)

5)推进螺旋桨气动力
复合式高速直升机处于高速模式时,由推进螺旋桨提供前飞的推动力。推进螺旋桨在机体轴系下的力和力矩表示为:
(8)
式中:ρ为空气密度;rp为螺旋桨半径;Ωp为推进螺旋桨转速;kpp为推进螺旋桨拉力系数;ktp为推进螺旋桨反转矩系数;xp、yp、zp为推进螺旋桨桨毂中心在机体系下的坐标。
2 过渡模式操纵分配方法
复合式高速直升机的操纵机构在过渡模式不同时刻效率也不同。以低速模式向高速模式过渡为例,随着速度增加低速模式操纵机构效率降低,高速模式操纵机构效率提高。根据操纵量效率值,将过渡区间定为40~50m/s。在过渡模式中,所有操纵舵面同时参与操纵,操纵舵面的增加造成耦合更加严重,控制难度更大。文献[7]提出了线性过渡和功率最小优化过渡方案,本文在此基础上提出基于直升机操稳性和推进功率最优的分配方法。
以低速模式向高速模式过渡为例,过渡模式开始瞬间旋翼后倒角最大,这里记α1,max、α2,max为上、下旋翼最大后倒角。综合考虑线性过渡和功率最小优化方案,将操纵量变为旋翼后倒角参数,即可得到基于双旋翼后倒角约束的操纵分配方法。
(9)
(10)
式中:μ0、μ、μ1分别为过渡模式开始瞬间、过渡过程中和过渡模式结束瞬间的复合式高速直升机前进比。
在速度<40m/s时,直升机低头加速前飞,过渡模式开始瞬间俯仰角记为θmin。在过渡过程中让飞机线性抬头,纵向周期变距也要相应降低。同理,得到基于推进螺旋桨功率最优的过渡方法。
(11)
(12)
式中:B1s、B1e分别表示过渡模式开始、结束瞬间纵向周期变距配平值。通过式(9)-式(12)即实现了过渡模式控制分配。
3 过渡模式控制器设计
过渡模式控制器是复合式高速直升机的设计难点,也是实现全包线飞行最重要的一环。本文采用自适应PID方法设计复合式高速直升机过渡模式控制器,按上节设计的分配方法分配各操纵量,实现低速模式操纵量和高速模式操纵量的淡入淡出。
3.1 控制律设计
1)纵向控制律
过渡模式的俯仰姿态控制律由俯仰姿态偏差产生的纵向周期变距和高度变化产生的升降舵舵量两部分组成。俯仰姿态控制系统如图1所示。

图1 过渡模式俯仰姿态控制系统
过渡模式的俯仰姿态控制律为:
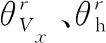
过渡模式前飞速度主要由机体俯仰姿态和推进螺旋桨控制。前飞速度控制系统如图2所示。
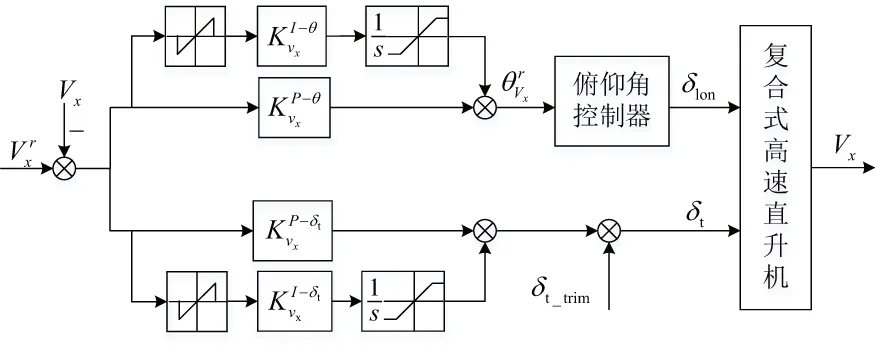
图2 过渡模式前飞速度控制系统
过渡模式速度控制律为:

高度回路主要由主旋翼总距和机身俯仰姿态产生的升力控制,高度控制系统如图3所示。

图3 过渡模式高度控制系统
过渡模式的高度控制律为:



2)横侧向控制律
过渡模式下对滚转姿态控制通过横向周期变距和差动平尾实现,滚转姿态控制系统如图4所示。

图4 过渡模式滚转姿态控制系统
过渡模式滚转姿态控制律为:


式中:φr为滚转角指令;δlat_trim为横向周期变距配平值;δa_trim为升降舵差动偏转角配平值。控制器的比例积分和阻尼系数随前飞速度自适应调整。
航向控制主要由双旋翼的差动总距、机身滚转和方向舵偏转实现,航向控制系统如图5所示。
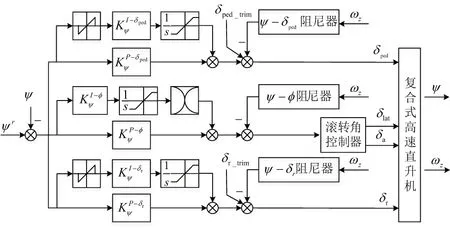
图5 过渡模式航向控制系统
过渡模式航向控制律为:

δr_trim

3.2 控制器参数自适应调整策略
本文根据复合式高速直升机在过渡模式不同速度对应的不同舵效设计自适应调整参数策略。以速度通道为例,过渡模式速度区间为40~50m/s。随着速度提升,尾部推进螺旋桨的舵效上升,纵向周期变距的效率降低,根据二者的关系计算推进螺旋桨和纵向周期变距控制通道的分配系数。
(13)
式中:λδt为推进螺旋桨通道的分配系数;λδlon为纵向周期变距通道的分配系数;∂M(V)/∂δt表示当前时刻的推进螺旋桨舵效;∂M(Vs)/∂δt表示过渡模式开始时刻推进螺旋桨舵效;∂M(Ve)/∂δt表示过渡模式结束时刻推进螺旋桨舵效。
过渡过程中纵向周期变距控制通道分配系数降低,推进螺旋桨控制通道分配系数逐渐增加,最终完全由推进螺旋桨控制前飞速度。由此可以得到自适应参数,即推进螺旋桨控制通道的比例、积分系数。
(14)

3.3 仿真试验验证
复合式高速直升机在高度100m、前飞速度40m/s的稳定飞行条件下,给定高速模式最小前飞速度50m/s的斜坡信号,仿真结果如图6-图10所示。
图6 纵向速度仿真曲线
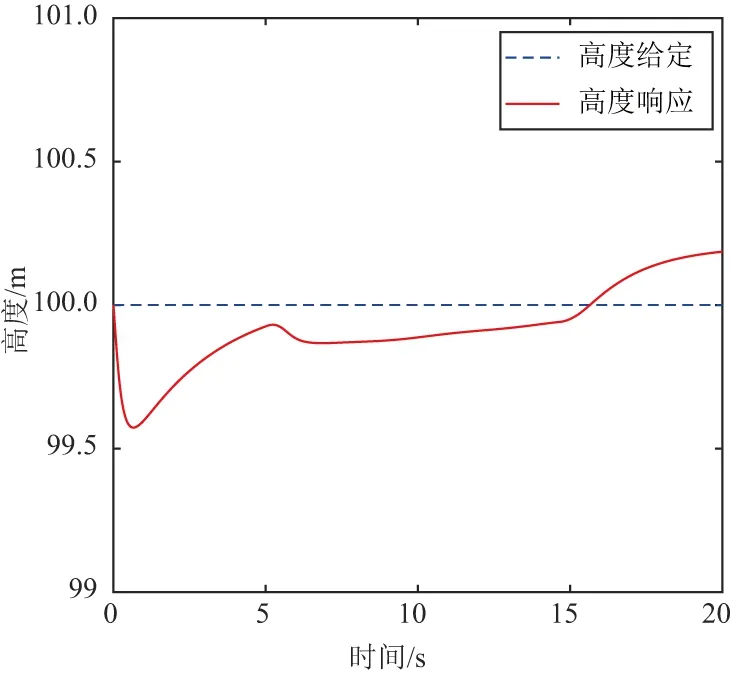
图7 高度仿真曲线
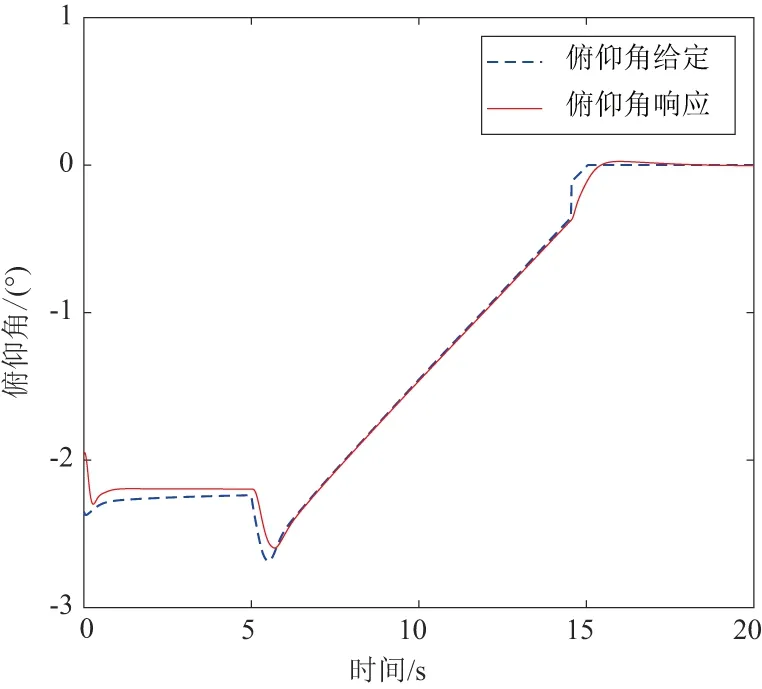
图8 俯仰角仿真曲线
从以上图中可以看出,纵向速度响应迅速,高度误差保持在0.5m以内,且俯仰角姿态保持良好。从低速模式操纵量和高速模式操纵量仿真曲线可以看出,在过渡前期,低速模式操纵机构占主导地位;随着速度的提升进入过渡模式后期,俯仰姿态逐渐回到0°,高速模式操纵机构占主导地位。因此,本文设计的复合式高速直升机过渡模式自适应PID控制器达到了预期的效果,保证了高速直升机过渡飞行的平稳性。

图9 直升机操纵仿真曲线
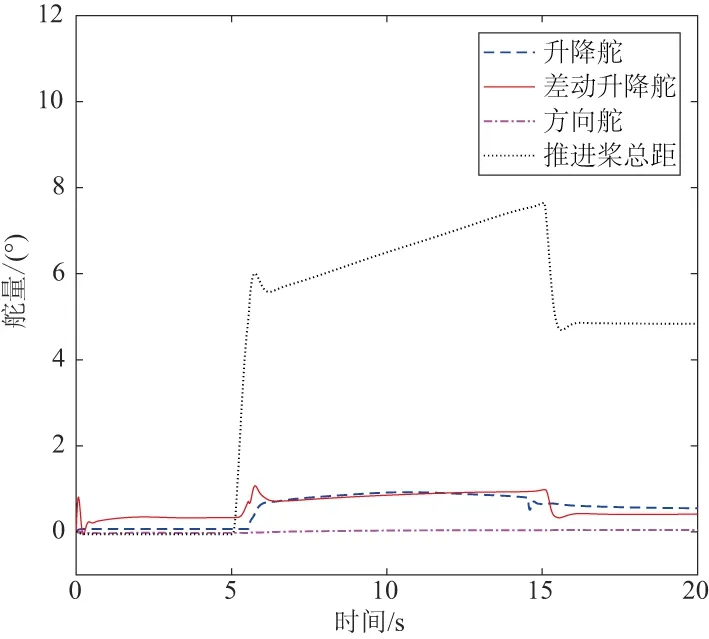
图10 飞机操纵量仿真曲线
4 结语
本文主要研究了复合式高速直升机过渡模式的操纵特性,提出基于操稳性和推进功率最优的控制分配方法,设计过渡模式自适应PID控制器。仿真验证该控制器能够保证复合式高速直升机平稳、快速地完成低速模式与高速模式的切换,过渡过程中直升机姿态保持良好,指令跟踪迅速,为后期工程应用奠定了良好基础。
猜你喜欢
直升机技术(2021年4期)2022-01-12
装备制造技术(2020年1期)2020-12-25
航空发动机(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
民用飞机设计与研究(2019年4期)2019-05-21
大飞机(2018年1期)2018-05-14
兰台世界(2017年10期)2017-06-01
北京航空航天大学学报(2016年3期)2016-02-27
航空学报(2015年4期)2015-05-07
少年科学(2014年7期)2014-08-18
