
一种航带间点云高程差超限的校正方法
2021-02-05 08:40郭如宝
北京测绘 2021年1期
郭如宝
(内蒙古自治区航空遥感测绘院, 内蒙古 呼和浩特 010010)
0 引言
机载激光雷达(Light Detection And Ranging,LiDAR)集成了全球定位系统(Global Positioning System,GPS)、惯性导航系统(Inertial Navigation System,INS)、激光测距系统(Laser Scanning Ranging),可快速获取地表物体的三维坐标信息[1-3]。近些年,随着航空摄影技术的快速发展,机载LiDAR系统作为一种新的数据获取模式,改变了传统的数据获取手段,进一步推动测绘地理信息行业的发展。
机载LiDAR系统飞行作业时,由于受飞行高度和激光扫描仪扫描视场角的限制,每条航带只能覆盖地面的一定宽度,要完成大面积作业就需要敷设多条航带,相邻航带须保证一定重叠度。机载LiDAR系统各子系统本身及子系统间会存在一定的误差,误差会导致点云数据不同航带的同名特征点存在系统性的三维空间偏移,会影响点云数据的相对精度[4-7]。同时,在飞行作业过程中,由于气象条件、飞机姿态、IMU累计误差、地面基站不均匀等客观因素的影响,各航带间可能会出现不规则的点云高程差超限的问题。
本项研究以通辽摄区为试验区,采用一种对航带间点云高程差超限的校正方法,对相邻航带进行整体平差,有效消除或减小了航带间重叠区域的高程差异,并通过大量外业检查点进行精度检测,点云精度达到了相关规范要求的技术指标,最终验证了这一校正方法的可行性,为解决其他类似问题提供一种思路。
1 试验区概况
试验区位于内蒙古自治区通辽市南部,东经121°30′00″~123°45′00″,北纬42°40′00″~43°40′00″,摄区面积17 710 km2。要求点密度≥0.25个/m2,点云旁向重叠度≥20%,点云高程精度优于0.3 m,未限制必须同步获取影像数据,可采用夜间航摄飞行方式。
在试验区范围内及周边选取四个全球导航卫星系统(Global Navigation Satellite System,GNSS)连续运行参考站为基准站,并架设两个B级点作为补充基站,采用联合基站的方法解算POS数据,将机载POS获取的实时数据,通过精密基站坐标,修复定位精度,解算POS数据。
试验区内布设了一个检校场和三个精度验证区。检校场区域内需要一个校准建筑物和一个控制场,并且尽量远离水面(如湖海、江河)等低反射率的地区,并包含平地和街道,检校场航线采用3×4的方式布设。精度验证区在距离基站、检校场较远、精度相对较弱且外业控制实施容易的区域选取,不同精度验证区应选在不同地形条件、不同航线且相距较远的区域,每个区选取20个以上检测点,保证精度满足要求。
试验区获取的高精度点云数据经去噪分类后,可生成1∶10 000比例尺高精度数字高程模型(Digital Elevation Model,DEM),结合卫星影像生成的数字正射影像(Digital Orthophoto Map,DOM)产品,通过等高线反衍技术,利用单片测图的方式可快速生产1∶10 000比例尺数字线划地图(Digital Line Graphic,DLG),能有效填补内蒙古自治区1∶10 000比例尺无图区的空白,是基础地理信息数据的重要来源,为内蒙古自治区经济建设、资源开发和生态监测管理发挥重要作用[8]。
2 点云数据获取
2.1 技术流程
点云数据获取分五个阶段,分别是设计准备阶段、飞行作业阶段、数据处理阶段、质量检查阶段和整理验收阶段。技术流程如图1所示。
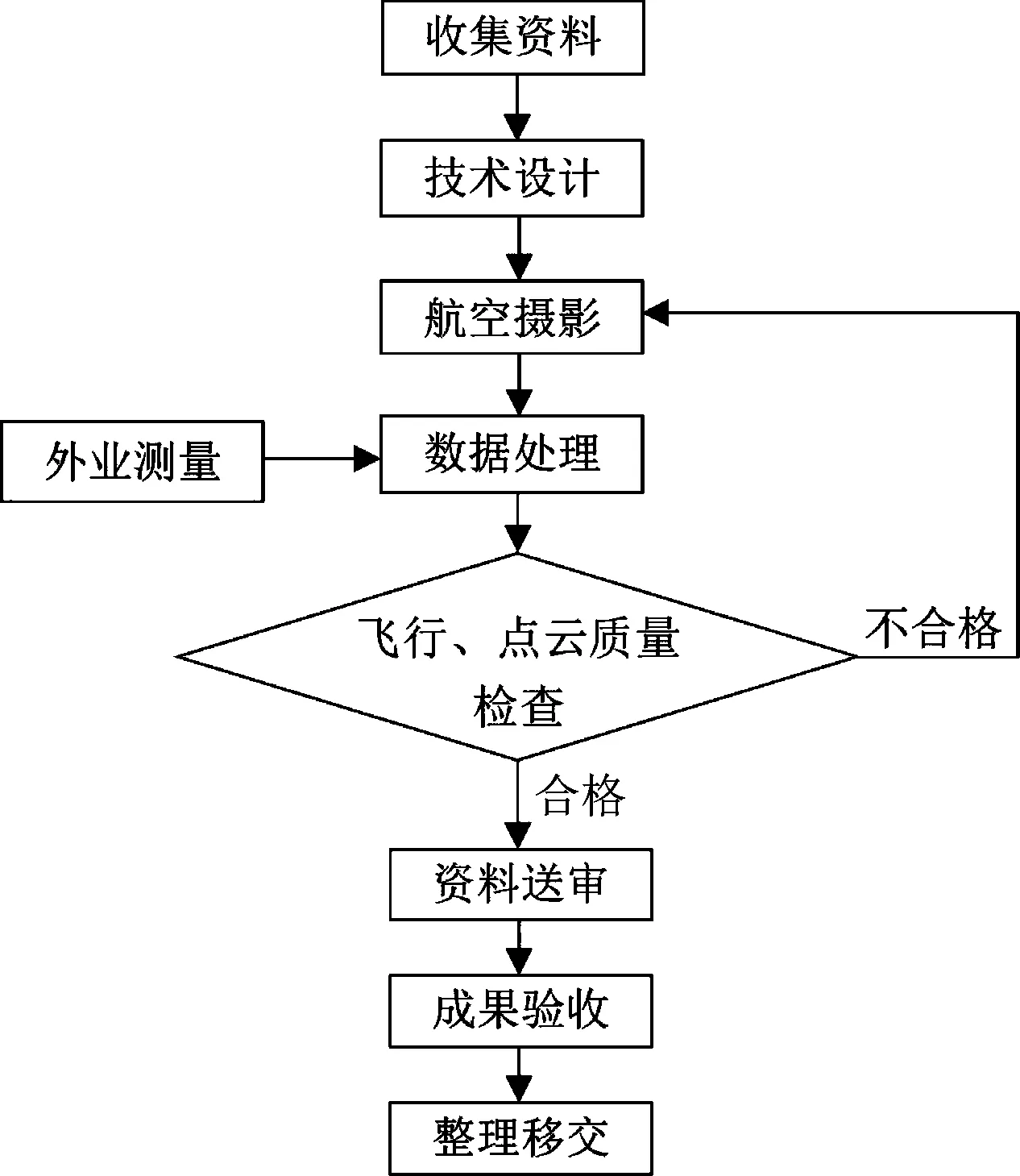
图1 技术流程图
(1)设计准备阶段,需要掌握航摄区域的地形地貌、气候、机场位置等情况,确定航摄区域的基准面,以此判断摄区是否分区,根据航摄仪参数设计相对航高,从而确定摄区的绝对航高,根据摄区面积、位置走向设计航摄的飞行方向和飞行航线数,最后确定飞行航片数,编制航摄技术设计书。
(2)飞行作业阶段,根据设计准备航摄仪,联系通用航空公司,上报飞行计划,办理机场入场证。飞机调运至机场后,安装航摄仪进行地面调试。选择天气晴好日进行航空摄影,每飞完一个架次后,及时将原始点云数据交数据处理人员,快速处理数据并检查结果,以确定数据是否满足符合规范要求,是否需要补飞或重飞。
(3)数据处理阶段,原始点云数据为sdf格式,需利用RiANALYZE经过气象修正后生成sdc格式的文件,再利用Inpho软件的LPMaster模块对经过修正的sdc格式的点云数据,结合外业控制点数据进行平面位置和高程位置纠正,同时纠正双激光头扫描航线的高程差,输出激光雷达点云成果,并进行POS数据解算。
(4)质量检查阶段,需对整个摄区所有数据和文档全数检查,包括飞行质量、点云数据质量、附件质量和航摄文档,编制质量检查报告。
(5)整理验收阶段,由技术负责人向验收专家组做项目验收汇报,验收通过后出具检验报告。
2.2 仪器设备
试验区安排PC-6通用航空飞机和Trimble AX80机载LiDAR系统进行航空摄影,使用拓普康HiperSR型GPS连接就近的GNSS连续运行参考站测量地面高程控制点和检查点,POS设备选用Applanix AP60。Trimble AX80机载LiDAR系统技术参数如表1所示。

表1 Trimble AX80技术参数
2.3 技术设计
根据试验区要求,通辽摄区设计点密度为0.57个/m2,基准面高程为摄区最低点高程。
在AX80_Productivity_Version_09b.xlsx工具中,综合考虑激光发射频率、数据记录模式、激光MTA zone以及点云密度和飞机性能,将相对航高设定为3 500 m。
航线按南北方向敷设,平行于摄区边界线的首末航线一般敷设在摄区边界线上或边界线外,确保摄区边界实际覆盖超出半幅图幅范围,航向覆盖超出摄区边界线半幅图幅范围[9-10]。
在AX80_Productivity_Version_09b.xlsx工具中计算,确定试验区的点云向重叠度为25%,航摄因子计算表如表2所示。
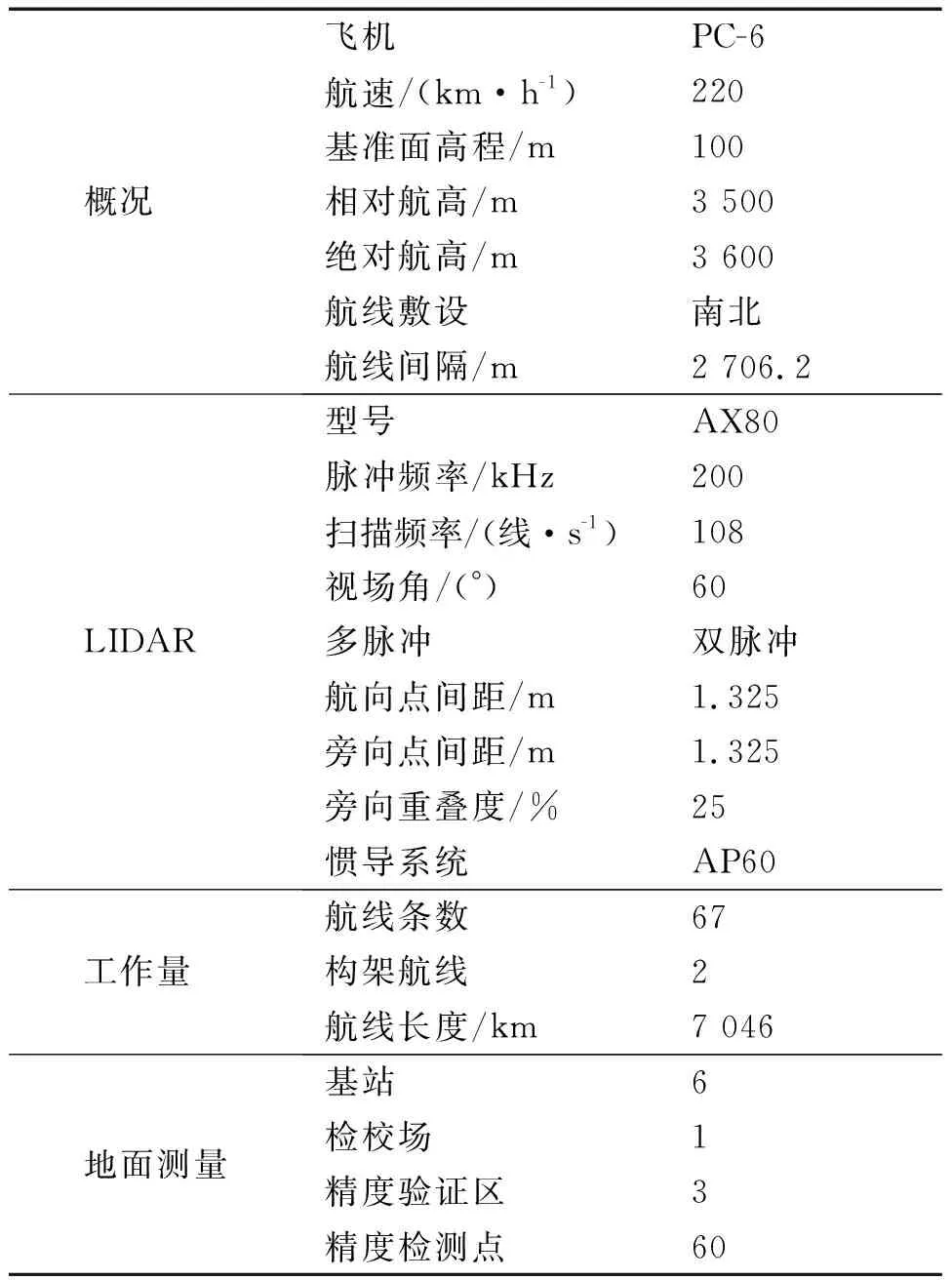
表2 航摄因子计算表
3 点云数据校正方法
3.1 试验区数据问题分析
在数据处理过程中,出现部分航带间点云数据高程差超限问题,且具有不规则性,导致航带间点云拼接精度不能满足相关要求,如图2所示。
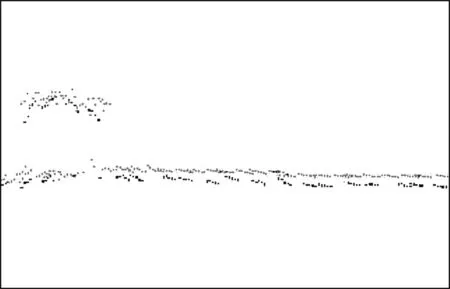
图2 校正前的点云数据
出现的点云数据高程差超限问题,可能是由于DGPS定位误差、姿态测量误差以及安置角误差(航向角误差、俯仰角误差和横滚角误差)引起的。机载LiDAR系统中,IMU与激光扫描仪紧密结合,安装时已尽可能使IMU各轴和激光扫描仪系统各轴指向平行,但实际安装完毕后,IMU各轴指向均与扫描仪系统各轴指向存在微小的角度差[11-13]。另外,在飞行作业过程中,气象条件对飞行的干扰非常大,飞机在受到气流而发生颠簸或逆风飞行时,可能会导致GPS定位偶然误差或IMU累计误差,都可能会造成点云精度的不规则性。各项误差累计后,可能最终会导致部分航带点云数据高程差超限。
3.2 航带间点云校正方法
航带匹配主要是利用航带重叠区域内的地面点和建筑点云提取连接线,并进行最小二乘匹配,计算航线的改正值。
首先要进行点云分类,其目的是为了减小计算量并提高连接线生成的精度和可靠性。点云分类需要考虑以下几点:
(1)植被应该尽量分离出来,植被区域通常存在多次回波,且地表结构不可靠;
(2)应分离出具备较好地表反射信号的地物,如平坦地面和倾斜屋顶等;
(3)分离出的地面点应均匀分布在空间中。
在机载LiDAR系统中,从点云数据中自动提取高精度的连接点比较困难,考虑到试验区内点云数据相对精度较高,可以采用在航带重叠区域内自动生成连接线的方法。
最后进行系统偏移计算,当相邻航带点云数据的高程存在差值时,通常会在Z方向上进行偏移校正,当相邻航带点云数据平面和高程都存在差值时,可同时进行Z方向和Roll、Pitch和Heading角度的偏移校正。在高程和平面联合校正的情况下,连接线的生成需要注意多个方向较大密度的分布。校正后的点云数据如图3所示。
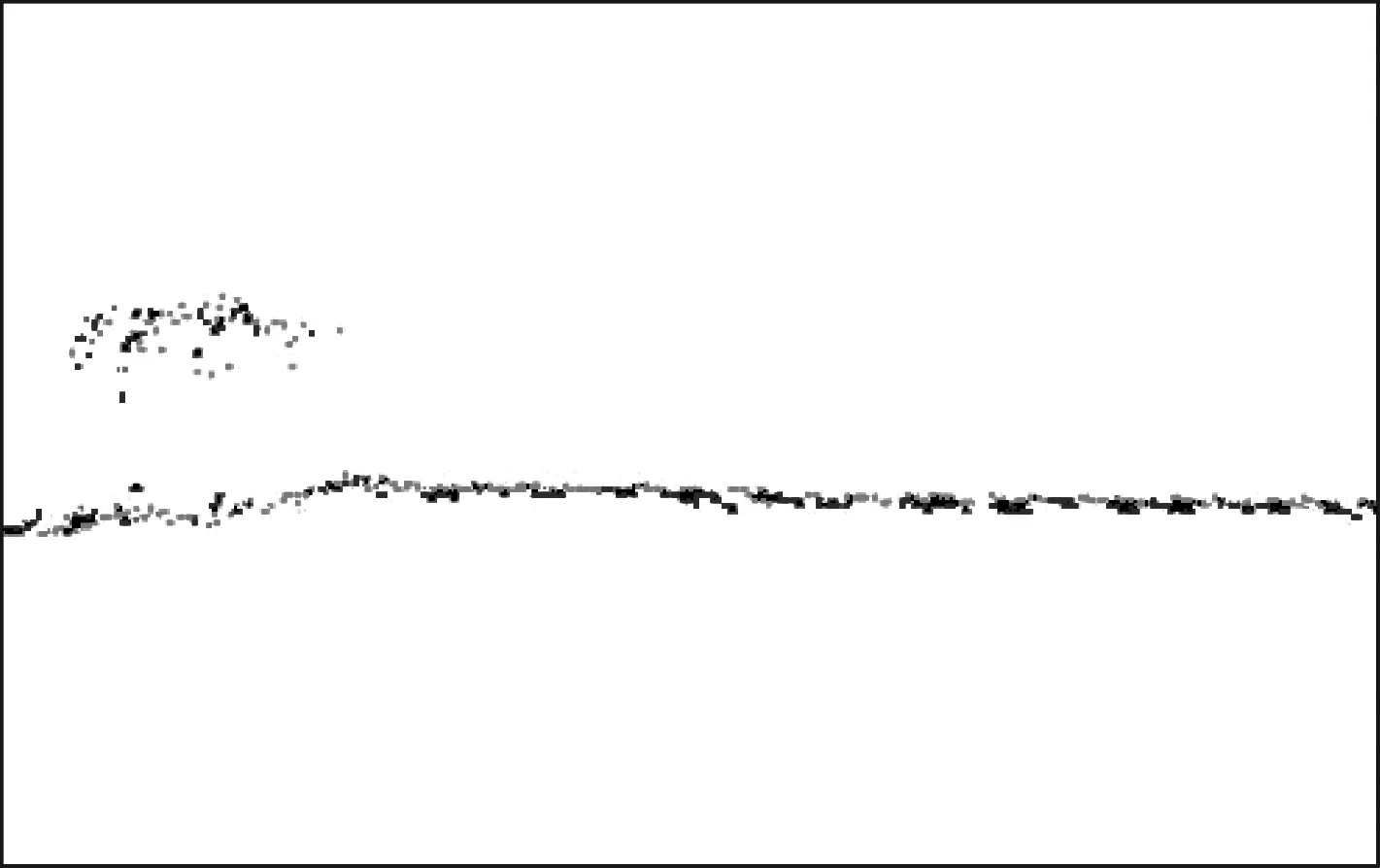
图3 校正后的点云数据
4 精度分析
将外业高程精度检测点导入校正后的点云数据中,进行点云高程精度检测,可计算出点云误差最大值为0.194 m,最小值为0.017 m,误差平均值为0.090 m,高程中误差为0.104 m,经过校正后的点云高程精度满足相关技术要求,如表3所示。
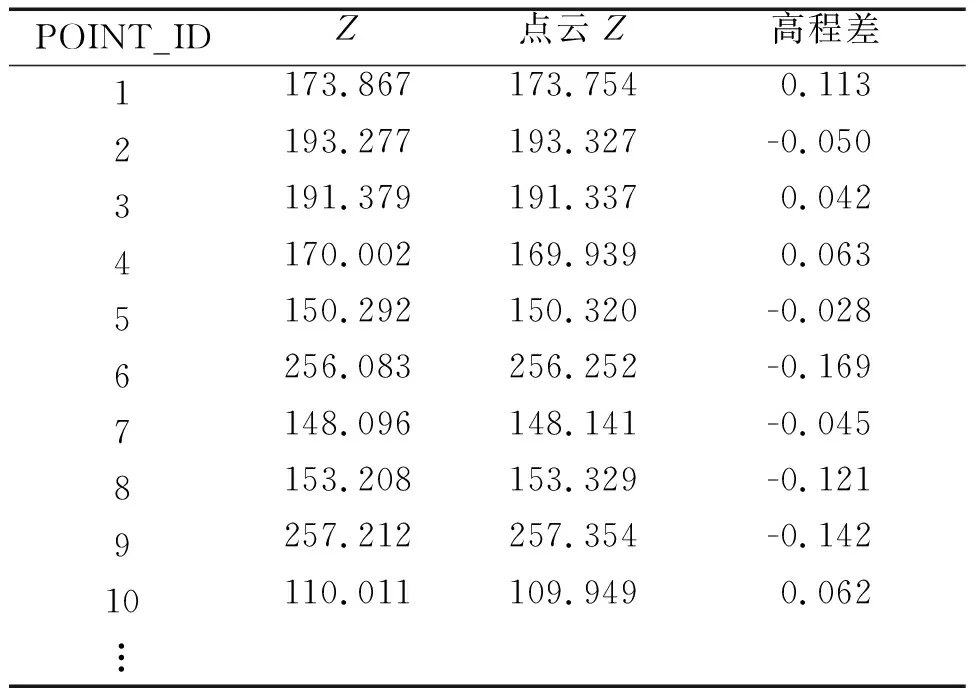
表3 点云高程精度检测表 单位:m
5 结束语
本文以通辽摄区机载激光雷达点云数据为例,介绍了一种快速、高效解决部分航带间点云高程差超限的校正方法,避免了由于数据精度问题造成的补飞或重飞,节约了时间和经济成本,为解决类似问题提供了一种思路。但这种方法可能会存在一定人为的偶然误差,不建议在整个摄区大面积使用。
点云数据为高精度的高程信息数据,主要用于生产1∶10 000比例尺高精度DEM,反衍等高线后经平滑处理,可用于辅助1∶10 000比例尺DLG生产,能较快填补内蒙古自治区1∶10 000比例尺无图区的空白,是基础测绘生产的重要数据来源,为经济建设和高质量发展提供了数据保障。
猜你喜欢
绿色科技(2022年16期)2022-09-15
军民两用技术与产品(2022年1期)2022-06-01
浙江人大(2022年4期)2022-04-28
人民长江(2021年9期)2021-10-18
航天返回与遥感(2021年1期)2021-03-16
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
佛山陶瓷(2017年8期)2017-09-06
领导决策信息(2017年17期)2017-06-21
名人传记·财富人物(2016年9期)2016-11-10
