
基于树莓派的自动避障小车的设计与实现*
2021-02-07 09:07张秉森马吉忠杨一飞毛汉奎吴丽丽
南方农机 2021年3期
张秉森,马吉忠,杨一飞,张 敏,毛汉奎,吴丽丽
(甘肃农业大学信息科学技术学院,甘肃 兰州 730070)
0 引言
近年来,智能化的产品不断出现并进入人们的生活。就目前来说,自动化、智能化就是未来社会发展的方向。历史上的三次工业革命极大促进了人类社会发展。 第一次、第二次工业革命推动了机械的发展,解放了社会生产力;第三次工业革命是信息技术的革命,对人们的生活方式和思维方式产生了巨大的影响[1];而第四次工业革命已经来到,毫无疑问,这次的工业革命将会对人类的生产生活产生更为深远的影响。 本项目设计自动避障小车具有用途广泛、可扩展性强等特点,可以根据需求来添加所需要的功能,市场应用前景广阔。
1 总体结构

图1 自动避障小车总体结构
本项目设计的自动避障小车主要由以下五个模块组成:超声波避障模块、电机驱动模块、摄像头模块、蓝牙模块、手机APP。 五大模块在主控芯片树莓派3B+的控制协调之下,完成小车的自动避障功能。 小车启动运行后自动前行,通过自动避障模块计算判断前方障碍物,然后通过电机驱动模块控制电机转向避让。 后期可以再根据自己的需求添加对应的功能,可扩展性极强。 小车总体结构如图1 所示。
2 硬件设计
2.1 主控芯片
主控芯片可以说是自动避障小车的核心和大脑,负责协调控制小车的所有功能的实现和运行。 所以选用了树莓派3B+作为小车的控制芯片。 树莓派3B+是一款基于ARM 的微型电脑主板,具备所有PC 的基本功能,其采用了 4 核 Cortex A53 64 位 V8 结构,自带 1GB 的内存和 4个USB 接口,带有视频输入、影像输出、音源输出等一系列输入输出接口,性能优秀,且成本较低,使用安装方便。实物如图2 所示。
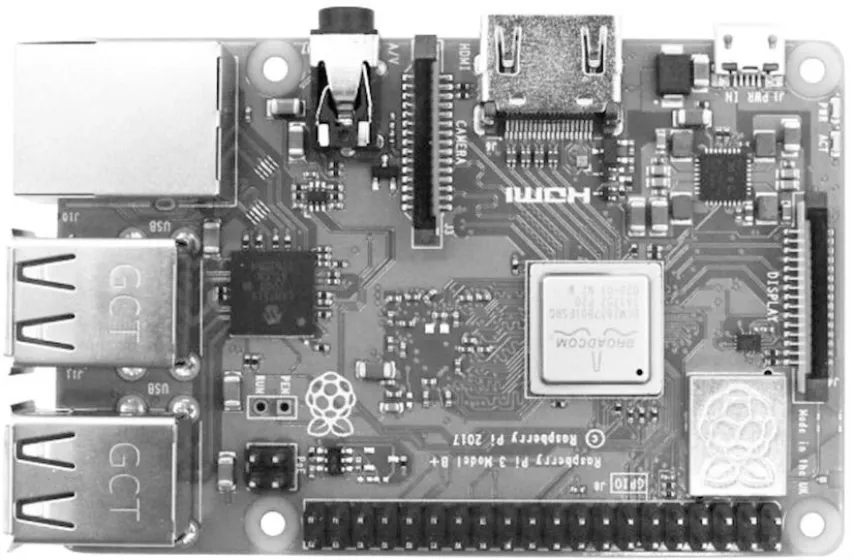
图2 主控芯片树莓派3B+
2.2 超声波避障模块
超声波测距的原理是超声波发射器向某一方向发射超声波,然后通过计算源声波发送时刻和回波信号接收时刻的时间间隔来获取障碍物的距离信息。
选用了HC-SR04 芯片作为小车的超声波避障模块的主控。 其工作原理是从控制口发射出电平信号,然后在接收口等待电平信号输入。 当接收口接收到电平信号之后打开定时器计时,电平信号消失后时读取定时器的值,即为此次测距的时间,再通过时间即可算出距离。
HC-SR04 超声波测距模块提供了2cm~400cm 的非接触式距离,其工作时序图如图3 所示[2]。 HC-SR04 需要提供一个10us 以上的脉冲触发信号来激活模块进入工作状态,进入工作状态后,模块内部发出8 个40kHz 周期电平并检测回波的到来,当检测到有回波信号时输出回响信号[3]。回响信号脉冲宽度与所测距离成线性相关[4]。为了防止发射信号对回响信号的干扰,触发信号周期为60ms以上[2]。

图3 HC-SR04 超声波测距模块工作时序图
2.3 电机驱动模块
选用了L298N 电机驱动芯片作为小车的驱动的主控。L298 电机驱动芯片是SGS 公司的产品,其中比较常见的一款是L298N 电机驱动芯片。 一片L298N 芯片可同时驱动多个直流电机做各种不同的动作,且具有过热保护和检测反馈功能,可以与树莓派3B+直接相连,操作使用简单方便,稳定性好。 其电路图如图4 所示。
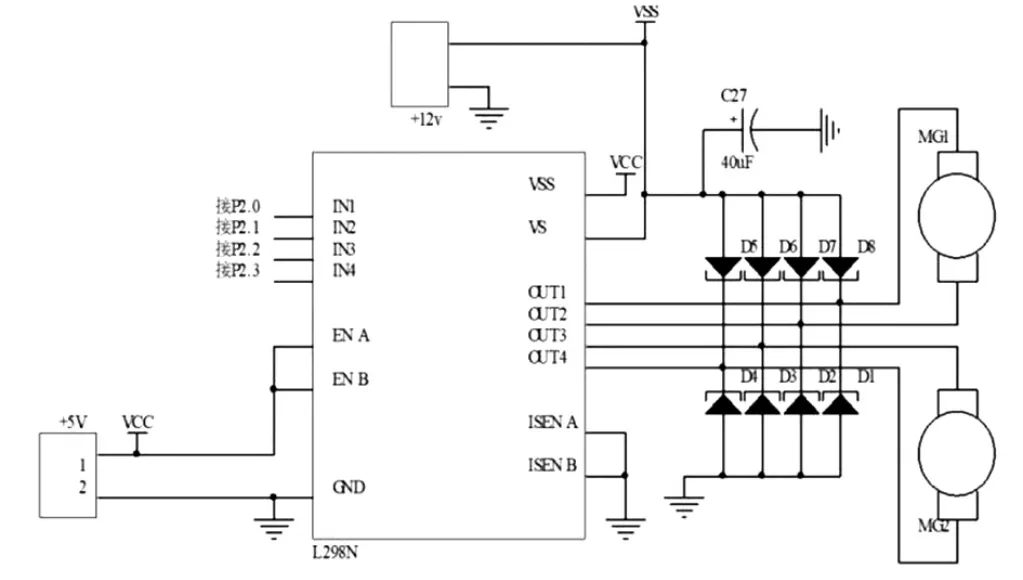
图4 电机驱动模块电路图
2.4 摄像头模块
选用了与树莓派配套的DSI 排线摄像头作为摄像头模块的摄像头,其与树莓派3B+直接相连,图像回传效果较好。
2.5 蓝牙模块
小车的蓝牙模块是树莓派3B+自带的蓝牙,以此实现电脑、手机与小车之间的通信联系。
3 软件设计
手机APP 基于Android Studio 开发,主要用于控制小车启停、查看实时传回图像等。 其主界面如图5 所示。
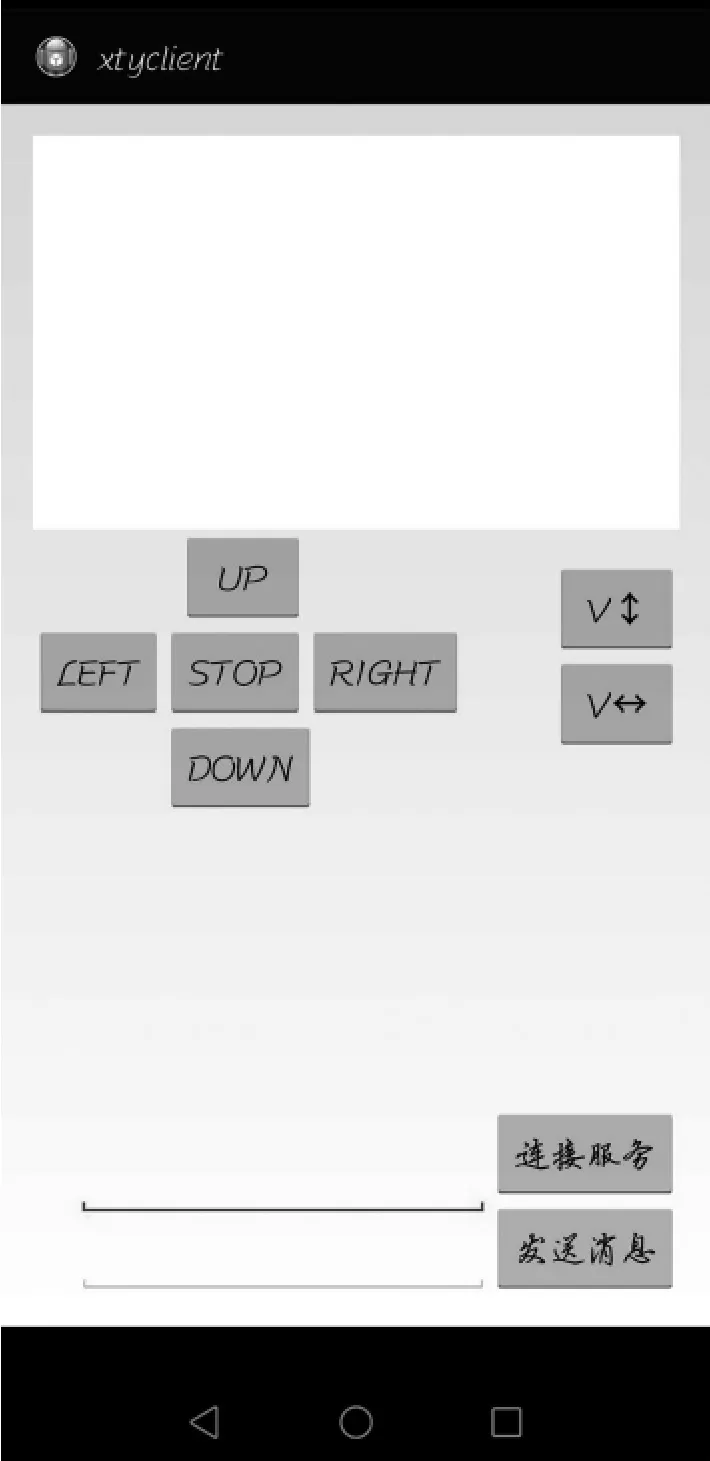
图5 手机APP 主界面
4 总结
自动避障小车基于树莓派芯片设计实现,通过超声波测距、摄像头等实现了小车的自动避障功能,达到了预计的设计效果。 后续可以根据需要的功能再去添加,应用推广价值极高。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
快乐语文(2020年36期)2021-01-14
电子制作(2019年11期)2019-07-04
文苑(2018年22期)2018-11-19
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
新少年(2017年1期)2017-03-15
农产品市场周刊(2016年43期)2016-12-23
军事文摘·科学少年(2016年7期)2016-09-20
