融合惯导和超宽带技术的定位算法
2021-02-07 08:56广州中海达卫星导航技术股份有限公司
电子世界 2021年2期
广州中海达卫星导航技术股份有限公司 李 冀 肖 岩
郑州联睿电子科技有限公司 马琳琳 袁子伦 许连杰
本文针对惯导行人航位推算(PDR)存在累积误差的问题,提出了一种基于惯导和UWB融合的定位算法。使用惯导的加速度计进行步伐检测和计步,结合超宽带(UWB)的飞行时间(TOF)测距信息进行步长及方向搜索得到移动目标的位置信息。实验结果表明:提出的算法提高了定位精度。
室内定位作为导航定位的“最后一公里”,近年已成为研究热点,也是导航与位置服务的核心问题。目前主流的室内定位技术包括:WIFI、蓝牙、RFID、UWB、惯性导航、地磁等,但是,每种定位方法在其精度、鲁棒性、成本、适用环境等方面各不相同。目前还没有一种单一的定位技术能够同时满足定位准确、实时、适应性强、可靠性高和成本低的特点。多传感器融合定位通过将各种独立的定位信息进行融合,达到信息互补和协同工作的效果,从而提高整个系统的定位性能。
目前基于UWB的定位技术由于其高精度的定位性能受到越来越多的关注,UWB定位通常最小定位单元至少需要布设三个或四个定位基站,范围越大部署成本越高,妨碍了其更广泛的应用。而基于惯性导航的定位方式无需部署任何信标节点,具有全天候、低成本等特征,其中行人PDR定位方法是目前研究较多的。由于PDR定位方法只能提供相对位置信息,定位误差会随着时间而累积,故需要绝对位置信息对其进行校正。
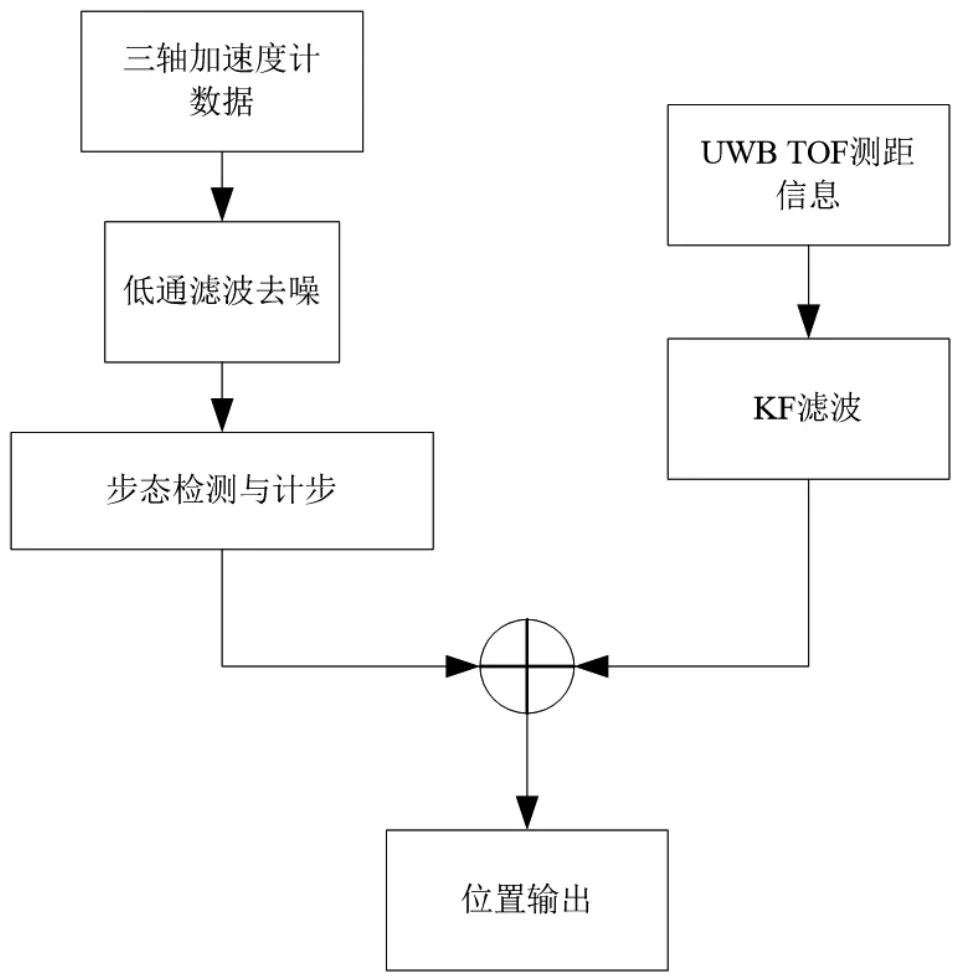
图1 基于惯导和超宽带融合的定位算法流程图
针对上述问题,本文设计了一种基于惯导和超宽带融合的定位算法,采用惯导的加速度计进行步伐检测和计步,结合超宽带(UWB)的飞行时间(TOF)测距信息进行步长和方向搜索,进而得到移动目标的位置信息,提高了室内环境下移动目标的定位精度,同时降低了UWB基站的部署成本。
1 基于惯导和超宽带融合的定位方法
系统整体框架如图1所示,结合三轴加速度数据和UWB测距信息得到行人最终的定位结果。
以东北天坐标系为例,对行人PDR算法进行简要说明,行人位置更新如式(1)所示。

式(1)中,(xk,yk)为第k步时行人的位置坐标,Lk+1为第k+1步时的步长,θk+1为第k+1步时行人行进方向相对于北向的夹角。本文的创新点在于步长及方向角的计算方法。
1.1 基于惯导的步伐检测
融合定位方法中步伐检测是最基本的前提,计步结果的好坏直接影响到算法最终的定位精度。本文对比了不同算法在不同状态下检步的性能,具体结果如表1所示。
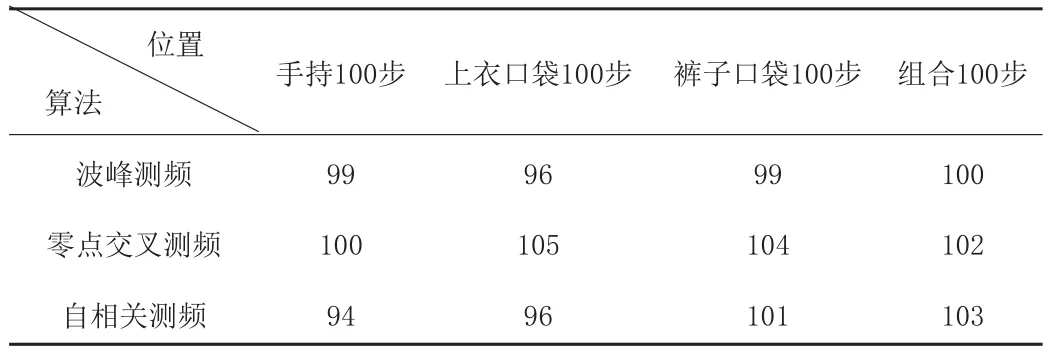
表1 不同步伐检测结果
通过对比测试,其中波峰测频性能略优于其他两种算法,而且波峰检测方法实现比较容易,故本文选择波峰测频方法对步伐进行检测。
1.2 基于超宽带的步长及方向搜索
考虑到传统基于惯导信号的步长及方向估计容易受惯导携带姿态及振动等外界条件的影响,提出了基于超宽带TOF测距信息的步长及方向搜索的方法,分为预测及更新两个部分。仅以二维进行说明。
(1)预测
考虑到行人步长的有界性及方向的随意性,设步长的范围为[L1,L2],方向的范围为[-π, π],第k步时行人的位置坐标为(xk,yk),则第k+1步可能的位置图2中灰色部分所示。

图2 行人第k+1步预测示意图
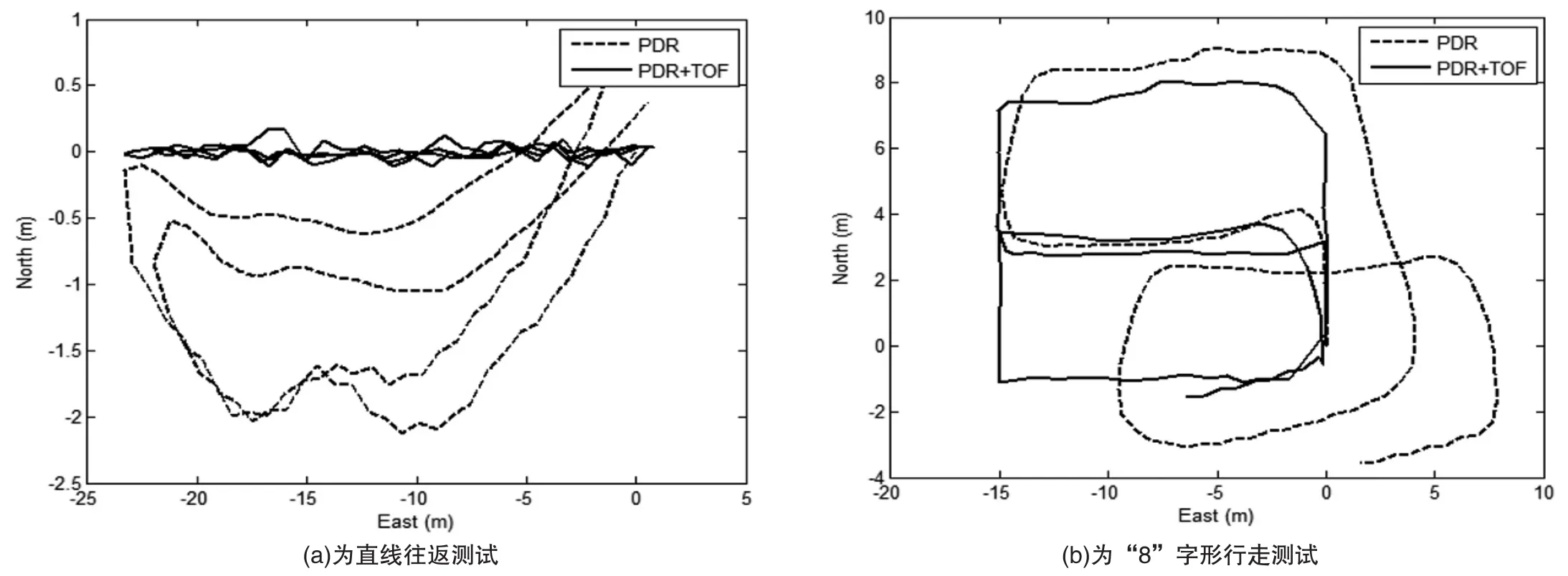
图3 两种方法的定位结果对比图
(2)更新
根据超宽带TOF测距值d与粒子集中每个粒子到超宽带基站的距离值的差值ei,计算第k+1步粒子集中每个粒子的概率值Pi,最后选出最大值Pi对应的位置粒子即为行人第k+1步的位置坐标。具体的计算方法为:
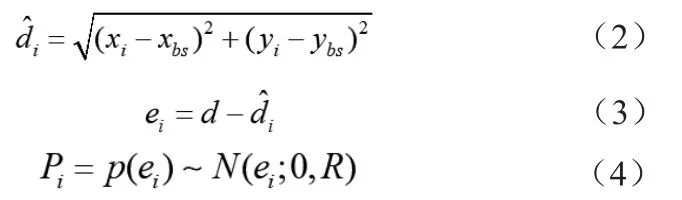
其中,(xbs,ybs)为超宽带基站的坐标。需要注意的是,若只有一个超宽带基站则得到的结果会存在模糊解,所以为了得到唯一的位置坐标,算法需要至少两个超宽带基站提供TOF测距信息来进行模糊解剔除。
2 测试及对比分析
实验中采用Arduino开发板及惯导模块、UWB测距模块搭建数据采集平台,离线采集数据后发送至PC端,通过时间信息将两类数据进行同步处理,然后通过Matlab软件对测试数据进行定位解算。测试使用基于惯导的PDR算法记为PDR,使用融合算法记为PDR+TOF,对于这两种方法分别进行了直线往返行走测试以及“8”字形行走测试,得到图3所示的定位轨迹。
由图3可知,PDR算法得到的定位轨迹累积误差逐渐增大,随着测试时间的增长,轨迹越来越偏离真实轨迹,而PDR+TOF算法能够有效抑制这种问题,保持轨迹的准确性。仿真实验结果表明:本文基于惯导和超宽带融合的定位算法提高了行人室内定位的精度。
结论:本文针对目前PDR算法定位性能差的问题,提出一种基于惯导和超宽带融合的定位算法。仿真实验结果表明,使用超宽带TOF测距值辅助惯导PDR解算之后,提高了定位性能。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
科学(2020年3期)2020-01-06
测控技术(2018年2期)2018-12-09
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年7期)2017-06-05
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01