
基于运动捕捉系统的小型有动力无人机气动特性分析
2021-02-24 04:47赵嶷飞张悦宸赵欣宇
科学技术与工程 2021年2期
赵嶷飞, 张悦宸, 赵欣宇
(1.中国民航大学空中交通管理学院,天津 300300;2.中国民航大学空中交通管理学院,天津 300300;3.民航机场成都电子工程设计有限责任公司北京分公司,北京 100015)
随着无人机逐渐成为社会热点,科研工作者们对无人机的研究日渐成熟,然而小型固定翼飞机的空气动力学性能尚未有系统标准的获取方法。小型无人机飞行特性需要更准确地研究数据来进一步了解其空气动力学模型,然而因为体积小、质量轻,阻碍了常规检测系统的使用,使得气动数据难以测量。现有的方式多以风洞实验为主,但操作复杂、成本较高、对所需硬件要求严格等原因成为很多研究者难以克服的困难。因此,如何方便、经济地获取小型有动力无人机的空气动力学数据变得至关重要,现将在此背景下提出一种普遍易行的获取方法。
运动捕捉系统用于测定非定常效应,而不需要风洞实验中所需要的复杂仪器。文献[1]描述了一种直接从收集的轨迹中提取飞机气动特性的技术。文献[2]介绍了一种从航迹数据中提取飞行器气动特性的方法。利用现代运动跟踪技术,可以从飞行数据确定作用在飞机上的力。文献[3]提出了一套物理启发的基础函数,使系统识别一个非线性空气动力学模型沿栖息轨迹。数据的收集使用动作捕捉系统,关键是允许自由飞行数据从真正的系统轨迹收集。文献[4]采用在运动捕捉系统中通过真实的运动学飞行数据获得准确的飞机模型。文献[5]中一个舷外运动跟踪系统捕获了一架小型无线电控制飞机飞行时的运动轨迹,对记录的运动轨迹时间历程进行了分析,确定了飞机在无动力飞行时的气动特性。文献[6]为了收集微型飞行器的非定常飞行数据,研究人员使用了一个离体运动跟踪系统来捕获飞行器的自由飞行轨迹,该参数模拟了攻角快速变化时的气动滞后,从而捕捉到了升力、阻力和力矩系数数据中动态失速的影响。文献[7]实验期间飞行数据由传感器数据采集系统记录,给出了用于分析飞行试验数据的数据分析方法。
对于上述已有的研究,多数研究对象为小型无动力无人机,对于有动力无人机的气动特性在不适用风洞模型的情况下尚未有明确可供参考且可供通用的测量方法。因此,在小型无动力无人机气动参数分析的基础上,对小型有动力无人机在不同功率输出下的推力值做出了测量,得到无人机的推力曲线。建立小型有动力无人机运动模型,使用MATLAB仿真得到飞机的空气动力学参数,为小型固定翼飞机的空气动力学性能提供方便、经济的新思路。
1 无人机物理参数
采用伟力F959后退式固定翼滑翔机(图1)。F959翼展75.0 cm,质量118 g,三视图如图2所示。机身由轻质泡沫材质构成,手工组装而成。飞机装配前,分别测量其各部件的质量和位置,并且根据质量惯性矩公式[式(1)~式(4)],估算其惯性力矩,结果如表1所示。

表1 飞机物理特性

图1 实验飞机实体

图2 实验飞机三视图

(1)

(2)

(3)

(4)
式中:Ixx、Iyy、Izz分别为航空器沿x、y、z轴的惯性矩;Ixz为航空器在xz平面的惯性积;ρ为刚体密度;xi、yi为质量微元mi在x、y轴上的位置信息。
2 小型有动力无人机空气动力学参数分析
2.1 推力测量
F959使用的电池容量为7.4 V,330 mA。由于飞行过程中发动机的输出功率不同,导致飞机在不同时刻受到的发动机推力都不尽相同,从而飞机每一时刻所受到的升阻力也会随之变化。因此,如何获得飞机行进时的不同推力值,成为分析小型有动力无人机空气动力学参数的关键。
采用直接测量的方式对飞机所受推力进行测量。F959小型无人机遥控器如图3所示,其中液晶屏所示CH3通道可显示油门杆输出效率,并在实验结束后选择性输出其飞行进程中所产生的数据,即在飞行实验后可导出油门杆实时输出功率,如在已知油门杆在每一节点输出功率对应的飞机推力的情况下,即可获得小飞机在飞行过程中所受发动机推力。获得每一节点的飞机推力方法如下。

图3 遥控器
首先将轻质硬纸片固定在飞机机头处,使得小飞机机头垂直朝下仍可立与水平地面。选择测量精度为0.1 g(即10-3N)的电子秤,去除轻质纸片质量及飞机自重后将小型飞机立与水平电子秤测量板上,保持飞机竖直稳定并且不受外力影响,缓慢推动遥控器油门杆,电子秤显示数值即为飞机所受实时推力。以1%为单位记录小型飞机所受推力数值,并绘制飞机推力曲线(图4)。

图4 F959推力曲线
从推力曲线可以看出,推力随输出效率的增长而增长,符合发动机运行规律。在输出效率为0~30%的推力增长幅度大于30%~90%,90%后的推力变化不明显。
2.2 建立气动参数模型
对于试验后期数据的处理,首先是通过基于轨迹时程中相邻点的线性插值估计姿态和位置来填补Vicon系统由于相机摆放位置、角度等问题导致的观测数据缺失。
在填充这些丢失的数据点之后,就可以对原始数据进行平滑和微分。由于Vicon系统不是100%稳定的,系统的原始测量数据包括了飞行实验中不可避免的散射、不确定性和噪声。原始测量结果后期用于计算速度和加速度,并进一步确定气动系数。在这些计算中,噪声将被放大和传播。因此,在对原始数据进行微分之前,需要对其进行平滑处理,以减少噪声的影响。
使用三阶多项式回归方法对原始测量数据进行平滑处理。S-G(Savitzky Golay)滤波法是一种多项式回归方法,利用给定次数的多项式进行非加权线性最小二乘拟合。
使用多项式拟合一组数量为2M+1,且以n=0为中心的数列x(n),即
(5)
式(5)中:f(n)为目标函数,n为0~+∞的随机变量;ak为待定系数,k=1,2,…,N。
最小二乘拟合的残差(ε)为

(6)
利用卷积运算,

(7)
式(7)中:h[m]、x[m]均为卷积变量。
若要ε最小,ε对各个参数的偏导数都应为0,即

(8)
化简后得
(9)
对用于平滑的三阶多项式拟合进行两次微分运算,计算出地球坐标系下的一阶、二阶导数。一阶导数得到速度、角速度,二阶导数得到加速度、角加速度。根据以往数据结论,采用四阶有限差分法的微分方法对实验获取的位置、姿态信息进行微分运算。一阶导数的四阶离散近似表达式为
x′(t)=[-x(t+2Δt)+8x(t+Δt)-8x(t-Δt)+x(t-2Δt)](12Δt)-1
(10)
式(10)中:x为变量;t为时间。
获得结果后利用多项式回归结果的导数来确定作用在飞机上的力和力矩,完成空气动力学分析机身坐标系,如图5所示。
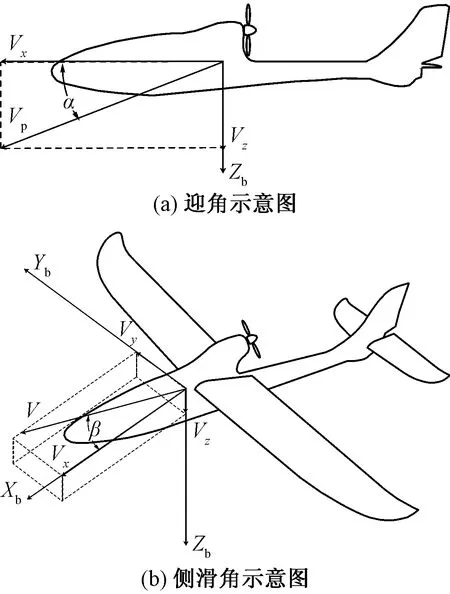
图5 机身坐标系
作用在飞机上的总外力是空气动力、推力和重力的组合。
Fe=Fa+FG+FT
(11)
通过在总外力中减去重力(FG)和推力(FT),可以得到气动力为
Fa=Fe-FG-FT
(12)
而重力为一常数,即
(13)
式(13)中:φ为滚转角;θ为俯仰角。
作用在飞机上的总外力可通过将飞机的质量乘以由数据微分给出的固定轴加速度(ax,ay,az)得
(14)
将空气动力(Fe)在机身坐标系下的元素转换为风坐标系,以产生升力(L)和阻力(D)的表达式为
L=-Fzcosα+Fxsinα
(15)
D=-Fzsinαcosβ-Fxcosβcosα-Fysinβ
(16)
根据图5示意的几何关系,得到迎角(α)和侧滑角(β)与速度沿xb、yb、zb三轴的分量Vx、Vy、Vz的关系为
(17)
升力系数(CL)和阻力系数(CD)可表达为
(18)
式(18)中:ρ为空气密度;V为空速;Sref为无人机基准面面积。
利用转动运动方程可计算出用于小飞机上的滚转力矩、俯仰力矩和偏航力矩分别为
(19)
滚转力矩系数(Cl)、俯仰力矩系数(Cm)和偏航力矩系数(Cn)分别为
(20)

2.3 飞行试验
试验中,Vicon系统提供的软件对贴有反射标记的运动物体位置进行三角测量,8台Vicon红外摄像机跟踪圆形标记的反射。捕捉范围为3.61 m的矩形场地,并延伸至3 m的高度。摄像机分布在捕捉区域的上边缘,跟踪飞机上的6个反光标记。反光标记为直径约5 mm的圆形球体。
飞行试验结束后,导出遥控器中推力输出数值,生成试验推力曲线,导入MATLAB对空气动力学参数进行分析,结果如图6所示。
图6(a)所示为飞机飞行的3D运动轨迹。图6(b)、图6(c)为飞机自身的速度和加速度曲线,可以看出飞机有轻微的侧向运动,这是由于人工发射不能准确按照预定轨迹飞行所致。还可得出在水平方向减速,在垂直方向上呈下降趋势的结论,这完全符合无动力飞机的运动规律。
由图6(d)可得,飞机在迎角为0°时升力系数最小,约为0.21,在迎角为30°时取得最大升力系数1.5,升力随着迎角的增大而增大。图6(e)所示为飞机的阻力曲线,当迎角为2°时阻力系数最小,约为0.12,飞机在迎角为30°时同样取得最大阻力系数0.25,阻力随着迎角的增大而增大。
图6(f)所示为飞机滚转力矩系数随侧滑角的变化曲线,在侧滑角变化范围为-8°~10°,滚转力矩系数随侧滑角的增大而减小,飞机具有滚转稳定性。图6(g)所示为飞机俯仰力矩系数随攻角的变化曲线,在攻角变化范围为-10°~23°俯仰力矩随迎角的增大而减小,飞机具有纵向静稳定性。图6(h)所示为飞机偏航力矩系数随侧滑角的变化曲线,在侧滑角变化范围为-10°~10°偏航力矩随侧滑角的增大而增大,飞机具有航向静稳定性。因此小飞机在此次实验过程中是静态稳定的。

图6 飞行实验结果
3 结论
描述了一架后退式固定翼滑翔机空气动力学系数的获取过程。首先对飞机在不同输出功率下的推力做了测试及记录,得到飞机推力曲线。飞机在动作捕捉系统的记录下进行飞行试验,将遥控器记录的输出效率导出获取飞机实时推力,将位置、姿态的基础上进行多项式回归结果的导数来确定作用在飞机上的力和力矩,利用MATLAB建模得到飞机的气动曲线。提出了一种方便易行的获取小型有动力无人机空气动力学数据的方法。然而,小型无人机产生的推力值较小,使用电子秤测量推力可能产生一定的误差,因此在未来的工作中,可尝试对螺旋桨系数进行研究,使用转速仪测试螺旋桨实时转速,根据螺旋桨性能曲线获取发动机输出推力值,对比其与过往方法的误差值,分析空气动力学性能。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
劳动保护(2018年5期)2018-06-05
无人机(2017年10期)2017-07-06
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09
专用汽车(2015年1期)2015-03-01
科技传播(2014年4期)2014-12-02
