
基于数字滤波器卷积核模型的系统响应误差分析与响应谱优化
2021-02-24 10:13缪小冬胡学敏
制造业自动化 2021年12期
徐 飞 ,缪小冬,胡学敏
(1.盐城工学院 汽车工程学院,盐城 224051;2.南京工业大学 机械与动力工程学院,南京 210016)
0 引言
随着产品结构设计越来越复杂、使用环境越来越恶劣,其使用可靠性问题已经成为产品设计和制造过程中需要考虑的主要因素。因此,如何评估和提高产品的可靠性成为目前亟需解决的问题。响应谱和疲劳损伤等效技术被广泛用于制定振动加速试验谱,进而评估产品在振动环境下的潜在损伤和疲劳寿命[1]。Kelly首先提出了脉冲响应不变数字滤波器法来处理冲击信号[2]。为了减小脉冲响应不变法引入的误差,Smallwood提出了斜阶跃响应不变法来提高冲击响应谱(Shock Response Spectrum,SRS)的计算精度[3]。Ahlin给出了利用斜阶跃响应不变法计算SRS和疲劳损伤谱(Fatigue Damage Spectrum,FDS)的MATLAB程序[4,5]。Anders Brandt对比了脉冲响应不变法、斜阶跃响应不变法和Runge-Kutta方法在线性动力学系统中的计算结果,指出数字滤波器法在计算速度、解的稳定性、动力学范围以及误差的可控性方面都明显优于Runge-Kutta[6]。ISO18431-4给出了利用斜阶跃响应不变法计算SRS的具体过程,并分析了该方法引入的偏置误差,指出该误差只取决于采样频率[7]。Magnevall等人给出了利用斜阶跃响应不变法计算非线性力学系统强迫响应的方法[8,9]。对于非线性系统辨识,陈友声指出数字滤波器法比四阶Runge-Kutta法更准确[10]。近年来,利用斜阶跃响应不变法计算SRS[11~13]、极值响应谱(Extreme Response Spectrum,ERS)和FDS[14~18],从而评估振动与冲击环境及推导试验谱等已得到了广泛的关注和应用[19~23]。然而,现有斜阶跃响应不变法引入的误差依然较大。为进一步减小误差,本文提出了基于数字滤波器卷积核模型的系统响应误差分析方法,在此基础上对比了脉冲响应不变法、阶跃响应不变法、中心阶跃响应不变法、斜阶跃响应不变法及三点拉格朗日法引入的偏置误差和相位误差,并基于三点拉格朗日数字滤波器对FDS和ERS进行了优化分析,最后结合案例对上述过程进行了阐述。
1 理论建模
1.1 基于数字滤波器的系统强迫响应计算模型
对于时域信号,线性时不变力学系统的强迫响应等于激励信号与脉冲响应信号的卷积:

其中,x(t)为响应,f(t)为激励,h(t)为脉冲响应信号。对于一个简单模拟系统:
其中s为拉普拉斯变量。该系统的脉冲响应为:

由式(1)和(3)可得,对于离散信号:

其中,T为采样时间。
由式(4)可知,x(nT+T)可由前一个时间步的响应x(xT)和[nT,nT+T]之间的输入求得,系统的影响取决于exp(-aT)。对[nT,nT+T]之间的激励的近似插值方法定义了数字滤波器方法。本文分析的数字滤波器方法包括脉冲响应不变法、阶跃响应不变法、中心阶跃响应不变法、斜阶跃响应不变法以及三点拉格朗日法,如图1所示。
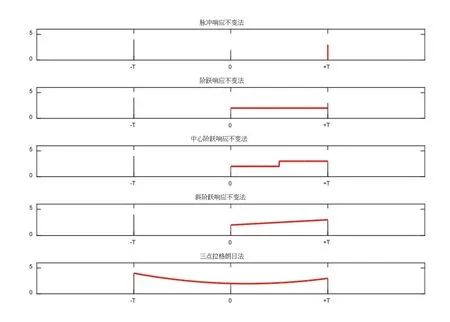
图1 不同数字滤波器法在[0,T]对激励的近似插值
以脉冲响应不变法为例,由式(4)可得:

由式(5)可得:

式(6)可转换成如下数字滤波器形式:

其中,bi和aj为数字滤波器系数,Nb和Na为数字滤波器阶数,其值取决于所采用的数字滤波器方法。
在此基础上考虑一个Q输入P输出的多自由度线性力学系统,其系统传递函数可表示为模态模型:

其中,Nm为模态阶数,[Rr]P×Q和Pr分别为系统第r阶模态的留数矩阵和极点,上标∗表示复共轭。
由式(6)和式(8)可知,对于q点输入p点输出的多自由度系统的每一阶模态,其基于脉冲响应不变法的z域频响函数可表示为:

再结合式(7)可知,利用任何一种数字滤波器可将多自由度系统在q点输入下p点的强迫响应表示为:

因此,构造出不同数字滤波器的系数即可求解多自由度系统在任意激励下的强迫响应。此外,由于所有采样系统均含有混叠效应,响应信号混叠后的频谱Xa(f)等于理论频谱X(f)与其经过频移后的频谱的叠加:

其中,Nal表示需要考虑的经过频移后的频谱的个数。
1.2 基于卷积核的响应误差分析
各种数字滤波器方法对于输入信号在单位采样时间内的插值近似都可看成是时域激励信号与各滤波器卷积核的卷积,该卷积对应于频域的乘积。不同数字滤波器方法的卷积核及其傅里叶变换如下:
1)脉冲响应不变法:
2)阶跃响应不变法:
3)中心阶跃响应不变法:
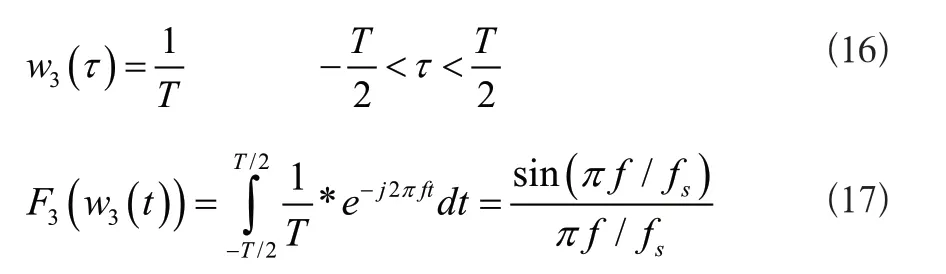
4)斜阶跃响应不变法:
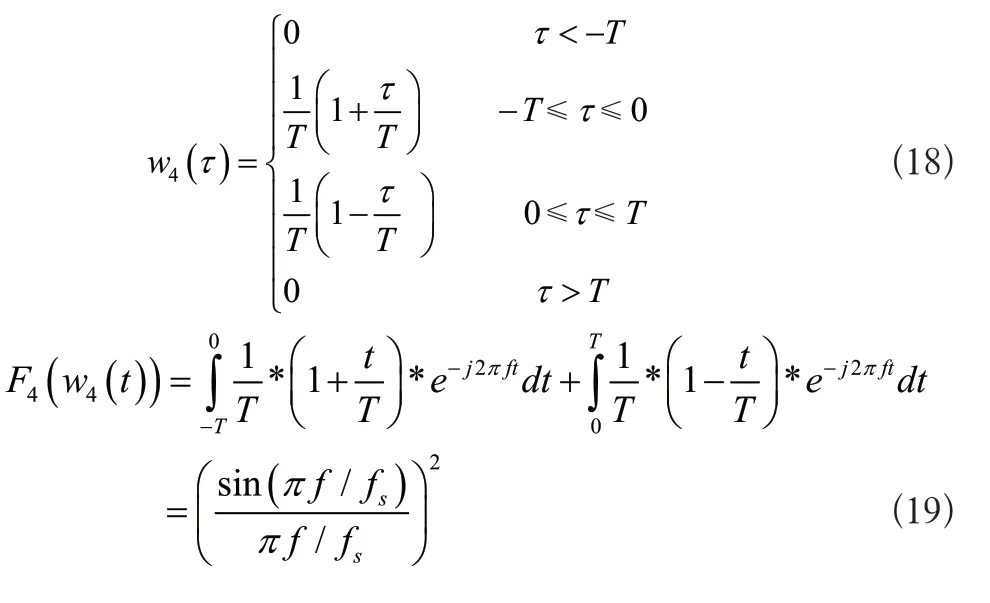
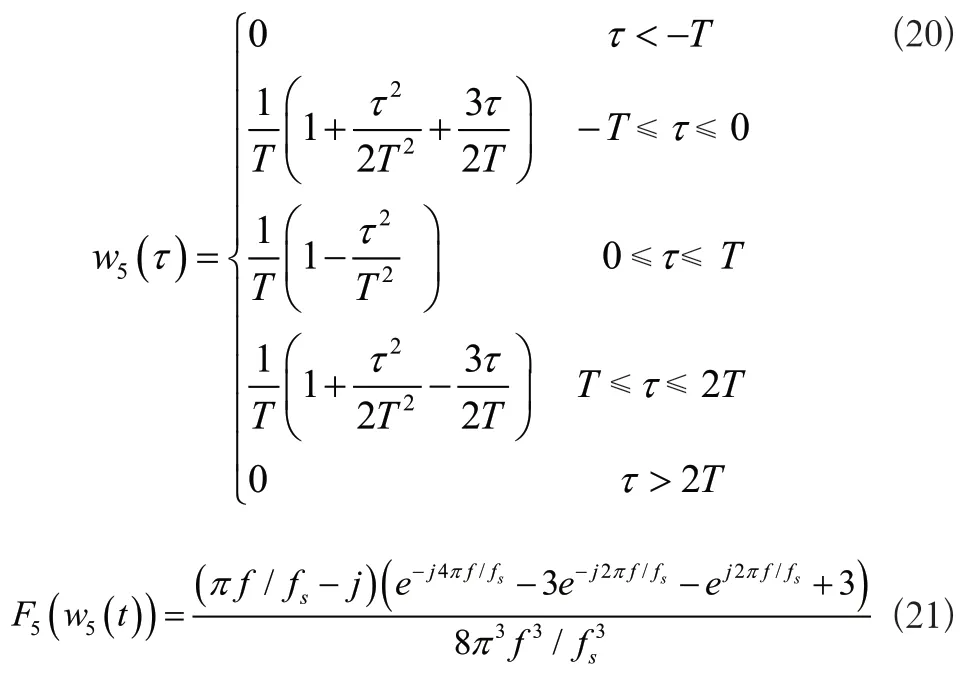
5)三点拉格朗日法:
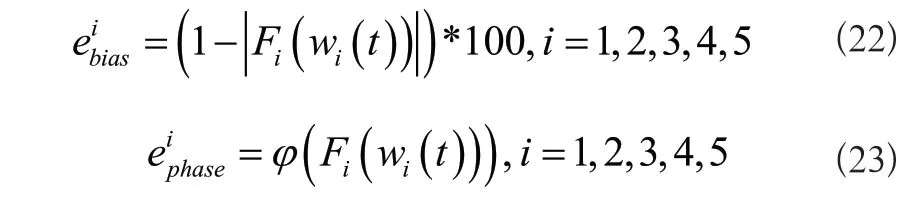
由式(13)、式(15)、式(17)、式(19)及式(21)可知,五种滤波器方法的偏置误差(%)和相位误差分别为:
1.3 基于数字滤波器法的FDS和ERS模型
响应谱常被用于评估振动环境、对比振动量级以及推导试验谱。最常见的振动响应谱包括FDS和ERS。FDS本质上描述了一系列单自由度系统对同一个加速度激励的响应,各个单自由度系统的响应被转换成一定时间内的疲劳损伤并与其共振频率形成一一对应关系,如图2所示。
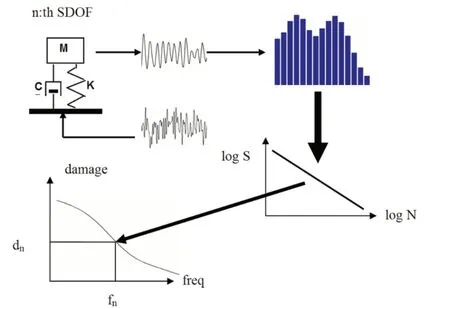
图2 FDS计算流程
在输入加速度x(t)下,一个共振频率为fn,阻尼比为ζ的单自由度系统的加速度输出xa可利用1.1节介绍的数字滤波器求解:

其中,a和b为所采用的数字滤波器的系数,filter为MATLAB函数。
在时域计算FDS时利用雨流计数法对各应力水平下的循环次数进行计数,然后结合S-N曲线和Miner准则计算疲劳损伤量(本文假设应力与加速度成正比):
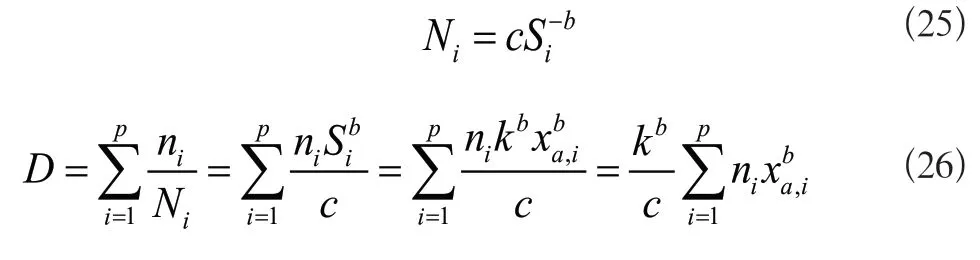
其中,ni表示在应力Si下的循环次数,p为所考虑的应力量级数,Ni为应力Si下的疲劳寿命,b为疲劳指数,D为时域总损伤。
ERS和FDS类似,不同之处在于ERS表示各单自由度系统的最大响应值与其共振频率之间的对应关系,即:

2 仿真案例
2.1 基于数字滤波器的响应误差对比
以一个单自由度系统为例,详细对比不同数字滤波器法对混叠误差的减少作用以及引入的偏置和相位误差。单自由度系统参数如下:m=1kg,c=6N·s/m,k=10kN/m,采样频率fs=80Hz。对系统施加单位脉冲激励,对比理论频响函数(Frequency Response Function,FRF)和由采样导致的混叠后的FRF,如图3所示。
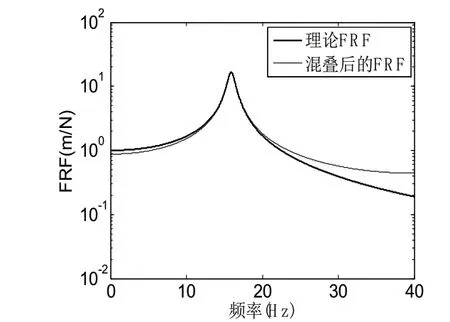
图3 理论与湿叠后的FRF
图4给出了各卷积核的傅里叶变换。从图4可以看出,脉冲响应不变法的卷积核的傅里叶变换为1,因此不能有效减小混叠效应;阶跃响应不变法和中心阶跃响应不变法的卷积核的傅里叶变换幅值相等,在不考虑相位的情况下对混叠效应的减小程度是一样的;三点拉格朗日法能够最大程度上减小混叠效应。
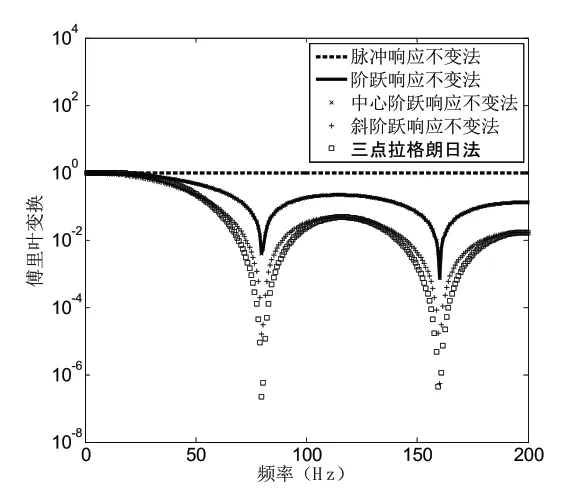
图4 不同卷积核的傅里叶变换
图5对比了理论FRF和采用数字滤波器方法得到的FRF。从图5可以看出,这五种数字滤波器方法得到的FRF都偏离了理论FRF。其中,结合图4可以看出,脉冲响应不变法的FRF偏离理论FRF并不是由于引入了偏置误差,而是混叠引起的。其他方法均引入了偏置误差,且偏置误差随着信号最高频率和采样率之比的增大而增大,如图6所示。从图6可以看出,当采样频率大于信号最高频率的10倍以上时,数字滤波器法的偏置误差均小于5%,其中三点拉格朗日法偏置误差最小并接近0。
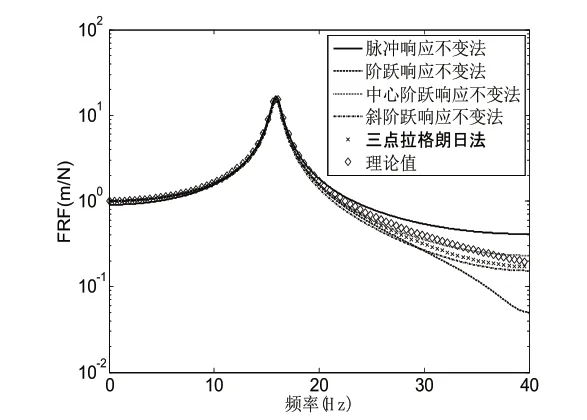
图5 FRF的理论值和数字滤波器求解值
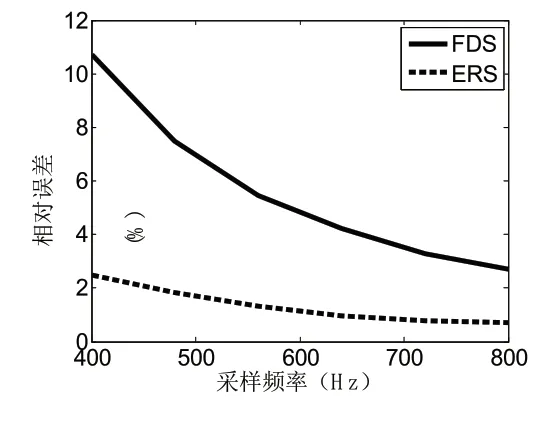
图6 偏置误差对比
图7给出了不同数字滤波器方法引入的相位误差。从图7可以看出,脉冲响应不变法,中心阶跃响应不变法以及斜阶跃响应不变法没有相位误差,阶跃响应不变法和三点拉格朗日法的相位误差随着信号最高频率和采样率之比的增大而增大,当采样频率大于信号最高频率的10倍以上时,除阶跃响应不变法外其他滤波器法的相位误差均接近0。以拉格朗日滤波器为例,图8对比了理论FRF,利用数字滤波器得到的FRF以及利用卷积核和混叠得到的FRF。从图8可以看出,利用数字滤波器得到的FRF以及利用卷积核和混叠得到的FRF完全吻合,表明卷积核可完全解释数字滤波器引入的误差。
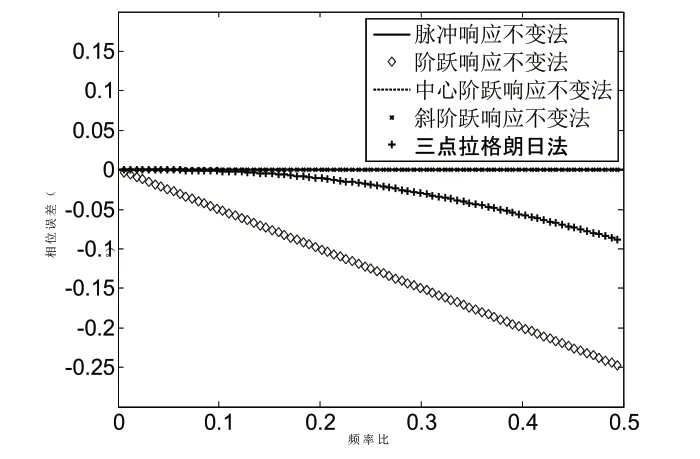
图7 相位误差对比
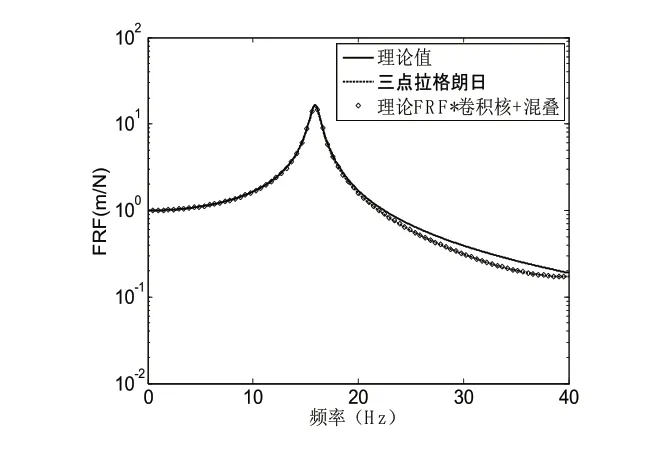
图8 拉格朗日数字滤波器方法卷积核的验证
2.2 基于数字滤波器的响应谱优化分析
假设激励加速度信号为x(t),持续时间为60s,频率范围2Hz~40Hz,功率谱密度为0.01g2/Hz。令质量因子Q=10,疲劳指数b=4,分别基于斜阶跃响应不变法和三点拉格朗日法计算位移FDS和ERS。为对比不同采样频率下两种滤波器计算结果,分别令采样频率为激励信号最大频率的2、4、6、10倍,结果如图9和图10所示。
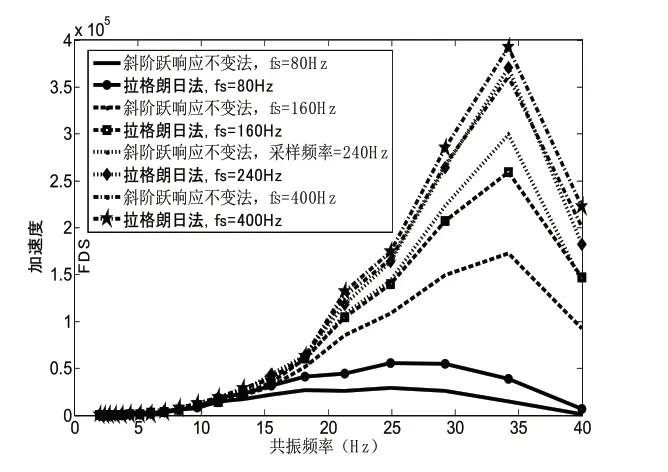
图9 递增采样频率下基于斜阶跃响应不变法与拉格朗日法计算的FDS
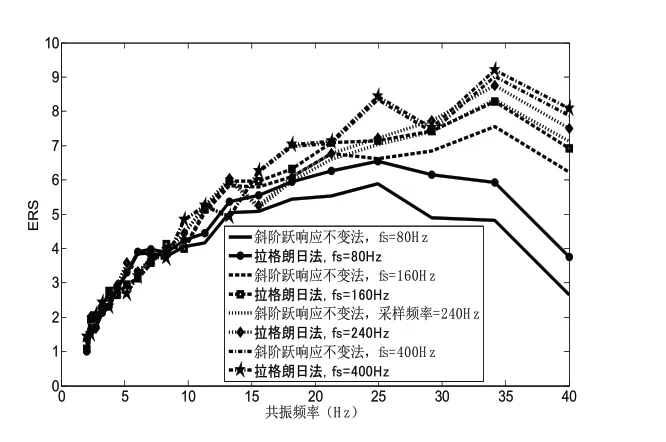
图10 递增采样频率下基于斜阶跃响应不变法与拉格朗日法计算的ERS
从图9和图10可以看出,利用两种数字滤波器方法得到的FDS和ERS随着采样频率的增大而趋于收敛;在给定采样频率下,共振频率越大,利用拉格朗日法得到的FDS和ERS越准确;即使采样频率达到10倍的激励信号最大频率,利用拉格朗日法得到的FDS和ERS依然比斜阶跃响应不变法更准确。
利用两种数字滤波器法计算得到的FDS和ERS的相对误差最大值与采样频率的关系如图11所示。从图11可以看出,随着采样频率的增大,利用两种滤波器得到的FDS和ERS相对误差减小;当采样频率为激励最高频率(40Hz)的10倍时,FDS误差超过10%,ERS误差在2%到3%之间;当采样频率约为激励最高频率的15倍时,FDS误差小于5%;ERS误差明显小于FDS误差。
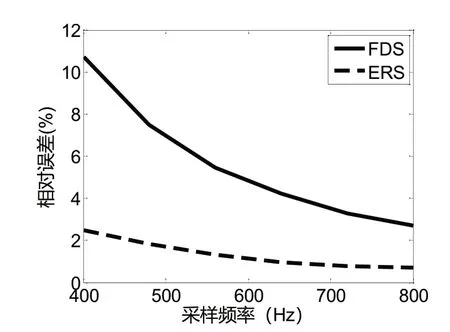
图11 基于斜阶跃响应不变法与拉格朗日法计算的FDS和ERS相对误差
3 结语
本文详细对比了脉冲响应不变法、阶跃响应不变法、中心阶跃响应不变法、斜阶跃响应不变法以及三点拉格朗日法引入的偏置误差及相位误差,并基于三点拉格朗日数字滤波器对FDS和ERS进行了优化分析。结论如下:
1)脉冲响应不变法不能有效减小混叠效应,因此不推荐使用。其他四种数字滤波器方法可有效减小混叠效应,且三点拉格朗日法能够在最大程度上减小混叠效应;
2)采样频率大于激励信号最高频率10倍以上时,各滤波器偏置误差均小于5%,其中三点拉格朗日法偏置误差最小且接近0;
3)当采样频率大于激励最高频率的10倍以上时,除阶跃响应不变法外其他滤波器法的相位误差均等于或接近0;
4)即使采样频率大于激励最高频率10倍以上,相比斜阶跃响应不变法,利用三点拉格朗日法计算得到的FDS和ERS依然更加准确,且FDS精度提高10%以上;
综上所述,三点拉格朗日法引入的误差最小,应该取代目前常用的斜阶跃响应不变法用于线性力学系统的强迫响应和振动响应谱计算,以提高试验谱推导和振动台闭环控制精度。下一步将继续研究三点拉格朗日法在超高斯随机振动和非线性系统的强迫响应方面的应用。
猜你喜欢
小天使·六年级语数英综合(2021年8期)2021-08-16
上海大中型电机(2021年1期)2021-06-09
科学文化(英文)(2020年1期)2020-08-07
建材发展导向(2019年11期)2019-08-24
数学物理学报(2019年1期)2019-03-21
新青年(2018年8期)2018-08-18
咸阳师范学院学报(2016年6期)2017-01-15
公民与法治(2016年4期)2016-05-17
华北理工大学学报(社会科学版)(2015年3期)2016-01-11
电大理工(2015年3期)2015-12-03
