基于WSN 的数据挖掘技术在海洋预测中的应用*
2021-02-25 06:28翟维
计算机与数字工程 2021年1期
翟 维
(西安航空学院电子工程学院 西安 710077)
1 引言
无线传感器网络(WSN)自20世纪90年代末诞生以来,已经发展成为一个能够收集和处理目标信息,并将处理后的信息传递给用户的协作网络。多年来,该网络已应用于环境监测、交通管理、风险监测、野生动物跟踪、安全监测等多个领域。
特别是WSN 的普及,改变了对水资源的监测。通过WSN 可以灵活地调整监测任务,实现对水资源的实时监测。无线传感器网络具有以下优点,尤其适用于监测大型水体的水质。首先,网络节点可以在监控区域内自动形成网络;其次,无线传感器网络具有广泛的监控范围;第三,网络对环境的影响较小[3~4]。
因此,本文基于无线传感器网络和计算机技术,设计了一种能够有效收集海洋水文数据的在线监测方案。然后,利用支持向量回归算法处理由传感器网络收集的数据。为了获得算法中最重要的参数,引入粒子群优化算法,通过粒子间的竞争找到全局最优解。之后,根据纽约港的水文情况,建立了海洋水文数据采集与观测系统。然后,利用传统的支持向量回归和所提出的方法,基于水温、盐度等指标预测海洋动态。结果表明,该算法提高了无线传感器网络的数据利用率,实现了较好的预测精度。
2 海洋水文无线传感器网络
2.1 基本概念
海水检测系统的硬件结构由传感器节点、网关节点和中央计算机系统组成。无线传感器节点分布在待检测的海域中,并且完成数据收集、简单处理以及与汇聚节点的通信。收集的数据沿传感器节点逐步传输,并在多跳后在汇聚节点处收集。它通过通用分组无线业务(GPRS)网络传输到控制中心,成为专家研究的第一手资料。同时,管理员可以通过GPRS 网络传感器网络节点,实现双向通信。本文简要介绍了无线传感器网络中的传感器节点和聚合节点。
传感器节点处于数据采集的前沿。它负责环境参数的采集,然后将信息传递给用户。其结构如图1所示。

图1 传感器节点系统架构
传感单元收集待检测对象的特征信号。通常,每个传感器单元都包含多个同时工作的传感器。单片机是传感器节点的控制核心,负责控制数据采集和传输,以及与节点的通信。聚合节点是系统的控制中心,主要由无线通信模块、单片机、电源模块、键盘和液晶显示器(LCD)组成。系统结构如图2所示。
节点通过无线通信模块控制无线传感器节点的数据采集。然后,收集的数据通过串行数据总线传输到主机上,在主机上提供友好的监控界面。它是海洋水文监测和分析系统的核心部分。

图2 汇聚节点图
2.2 海洋水文实时监测分析系统
海洋观测的最终目的是了解海洋规律的现状,预测海洋规律的未来,这需要更精确的数据。针对这一需求,我们开发了一个数据质量控制平台,该平台在海洋水文观测实时数据管理系统中发挥着非常重要的作用。提高数据质量是其它工作的基础,如果数据质量不高,即使有更好的模型和方法,我们的预测也是不准确的。数据质量控制平台是可扩展的,可以通过添加新的数据质量控制方法来实现。图3显示了海洋水文实时数据管理系统。

图3 海洋水文实时数据管理系统
3 粒子群优化SVM算法
首先介绍粒子群算法的原理和改进。有一个样本集:T=(xi,yi),1,2,…,n,其中xi为n 维样本集的第i个输入值,yi为第i个输出值。基于粒子群优化SVM 算法的学习过程,它可以解释为输入和输出之间的解f(·) 。对于任意T=(xi,yi) 1,2,…,n,它使得f(xi)=yi成立。一般情况下,f(·)可以表示为

式(1)中,w为权值,b 为阈值。φ的功能是将低维输入向量映射到高维特征空间。为了提高港口附近水位的预测精度,获得合适的参数,使结构风险最小化,我们可以构造经验风险函数,如式(2)所示

其中L称为损失函数,其表达式为

其中“ε> 0”。当研究样本较小时,用经验值代替实际风险值是不合适的,因此粒子群优化SVM算法考虑了称为SRM 标准的泛化风险,即SRM 准则。然后根据SRM准则,选取非线性回归函数:

根据粒子群优化SVM 最大区间的原理,将非线性回归问题转化为以下函数规划问题:

满足式(6)的约束:

在上面的公式中,参数ξi和为松弛变量,C为容量因子。一般将式(6)转化为拉格朗日对偶问题求解:

其中αi是拉格朗日乘数,K(·)称为满足以下公式的核函数:

本文将高斯核函数作为支持向量机的核函数。那就是:

本文在实践过程中采用了一种改进的PSO 算法。利用粒子群优化算法,通过粒子间的相互协作和竞争,寻找全局最优解。每个粒子代表一个可能的解向量。对于SVM,可以使粒子的当前位置为参数向量的当前值:

然后,优化过程得到的最优位置就是向量中各元素的最优解,即对应SVM的最优参数。改进PSO的基本原理可以表示为


式(12)中,wmax被认为是初始权重,wmin为最终权重,k为当前迭代次数,kmax是迭代的最大次数。
接下来,我们将介绍SVM 算法中使用PSO 优化惩罚参数和核函数参数的方法和步骤。
4 仿真实验与结果分析
4.1 相关数据的准备和描述
首先,在纽约港口和河流、河口上游建立了一组无线传感器(WSN)网络节点,为港口的海洋水文环境构建了观测预报系统。该系统结合了定点数据采集、数据拟合和预测模型,实现了利用水文指标预测港口附近水位的目的。
其次,我们在图4中给出了2018年10月1日当地时间0:00 红钩附近纽约港的水位图。从图4 可以看出,城市港口外的水位相对较低,而港口的水位相对较高。水位的实时控制有利于提高港口附近的安全水平。
第三,阐述了海洋环境水文指标。海洋环境观测的实时水文要素数据主要包括海水温度、盐度、密度、波浪、水流、海冰、水色、透明度等。

图4 红钩附近纽约港的水位
1)水温是海洋的基本物理因素之一,海面温度取决于太阳辐射,因此,低纬度海水温度高,高纬度海温低。
2)海水盐度是海洋中另一个重要的物理因素。除了不同海域的盐度不一样外,盐线性的垂直分布也是不同的。冷海表面的盐度较低,海水的盐度随深度增加而增加。
3)影响海水温度和盐度的因素都会影响海水的密度。海水的密度分布复杂,随地理、海洋深度和时间而变化。海水密度与温度、海水密度和盐度之间存在一定的关系。遵循以下原则,盐度越高,密度越高,温度越高,密度越低。
综上所述,选取盐度、大气温度和海面温度作为样本数据集,将其放入本文建立的改进SVM 预测模型中。
最后,根据本文建立的WSN,我们收集到2018年10 月1 日至10 月31 日城市港口的海洋水文数据。WSN 每四分钟收集一次数据集,共包含2,400条数据。然后将数据作为样本数据集,具体情况如图5、6、7所示。

图5 纽约港附近地表水温度
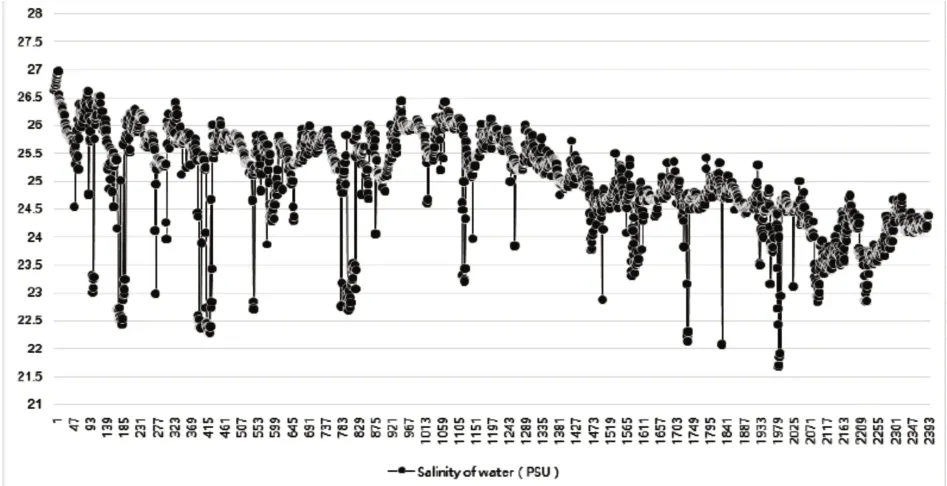
图6 纽约港附近海水的盐度
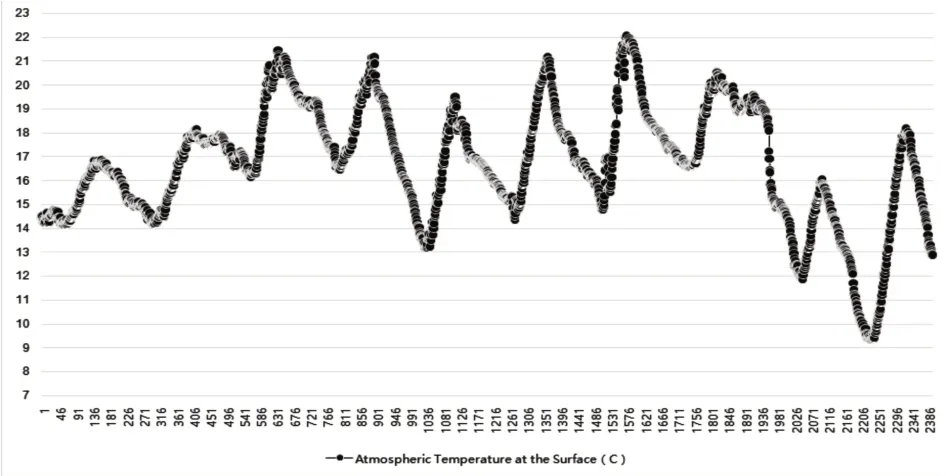
图7 纽约港附近的大气表面温度
4.2 实验步骤及结果分析
本文以 2018 年 10 月 1 日至 10 月 10 日纽约港的数据为样本数据集,然后使用支持向量机算法和本文提出的改进的粒子群优化算法预测未来港口附近的水位。接下来,我们将介绍实验的步骤,并与实验结果进行了比较,使用改进的PSO优化SVM算法进行分类预测。
参数准备:
初始学习因子c1:初始值为2,用于控制PSO参数的局部搜索能力;
初始学习因子c2:初始值为2,用于控制PSO参数的全局搜索能力;
maxgen:初始值为100,用于控制进化的最大数目;
sizepop:初始值为20,用于控制种群的最大数量;
K:初值为0.6,用于控制速度与x的关系;
nertia weight w:初始值是 1,wmin为 0.8,wmax为1.2,为速度更新公式中的弹性系数;
惩罚参数Cmax:初始值为100,用于控制SVM参数C的最大值;
惩罚参数Cmin:初始值为0.1,用于控制支持向量机参数C的最小值;
Gamma 参数 gmax:初始值为 100,用于控制SVM参数g的最大值;
Gamma 参数 gmin:初始值为 0.01,用于控制SVM参数g的最小值;
两种方法的实验结果如图8所示。
图8 为两种不同方法对纽约港红钩附近水位的预测结果,以及计算值与实测值的对比结果。从2400 个节点可以看出,该方法的预测误差最小。此外,它还表明数据的使用有好有坏,不仅与WSN有关,而且与数据挖掘技术密切相关。
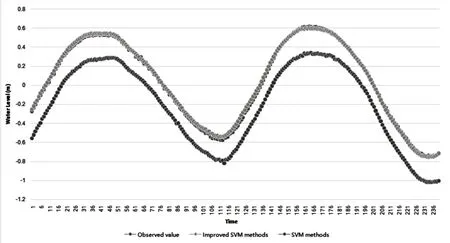
图8 预测结果对比
5 结语
本文提出了一种利用无线传感器网络和计算机技术进行水文数据收集并监测的方案。本文采用支持向量回归的方法对无线传感器采集的数据进行处理,利用粒子群算法通过粒子间的合作与竞争来寻找全局最优解。在模拟实验中,根据纽约港附近的水文情况,构建了纽约港采集观测系统。采用传统的支持向量回归方法和改进的方法进行对比,即利用水温、盐度和温度来预测水位的变化。实验结果表明,该算法能够提高无线传感器网络的数据利用率,具有良好的预测精度。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
现代电子技术(2022年4期)2022-02-21
智能计算机与应用(2021年4期)2021-06-05
无线互联科技(2021年4期)2021-04-21
档案管理(2020年2期)2020-03-31
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
小猕猴智力画刊(2019年3期)2019-04-19
小猕猴智力画刊(2017年6期)2017-07-03
黄河黄土黄种人·水与中国(2017年2期)2017-03-16
中国经济信息(2015年21期)2015-11-12