BDS/Galileo/GPS三频精密单点定位模型比较与分析
2021-03-01 15:45卜宇航李博峰苟浩洋
导航定位学报 2021年1期
卜宇航,李博峰,臧 楠,苟浩洋
(1. 同济大学 测绘与地理信息学院,上海 200092;2. 哈尔滨工程大学 智能科学与工程学院,哈尔滨 150001;3. 山东省交通规划设计院有限公司,济南 250031)
0 引言
全球卫星导航系统(global navigation satellite system, GNSS)的高速发展与革新,为用户提供了三频及更多频率的信号[1-2]。我国北斗卫星导航系统(BeiDou navigation satellite system, BDS)作为全球首个全星座可播发三频信号的系统,北斗二号(BeiDou navigation satellite(regional)system,BDS-2)已提供了B1I、B2I和B3I的信号服务,为了增强多系统的兼容互操作性,北斗三号(BeiDou navigation satellite system with global coverage,BDS-3)新增了B1C、B2a、B2b和B2a+b四个信号,且未来BDS-2播发的B2I信号将逐渐被BDS-3的B2a信号取代[3]。截止到2019年9月,美国全球定位系统(global positioning system, GPS)发射的12颗Block IIF卫星、在播发L1和L2信号的基础上,新增了L5信号服务。欧盟伽利略卫星导航系统(Galileo satellite navigation system, Galileo)可播发5个频率的信号,包括E1、E5a、E5b、E5和E6 。
三频信号为GNSS精密定位中模糊度固定、周跳探测和快速收敛等问题开拓了新的解决方案[4-7]。精密单点定位(precise point positioning, PPP)技术,因具备操作灵活、成本低且精度高等特点,已成为广泛应用的GNSS精密定位技术之一[8]。传统PPP是围绕双频定位模型展开的,随着多频信号的播发,三频PPP的研究及定位性能的评估对多频PPP的发展具有十分重要意义。目前,三频PPP的研究也取得了一定的进展。文献[9-10]利用GPS Block IIF卫星信号,展开了关于三频PPP算法的研究,指出为了充分利用三频观测值,必须考虑频率间的偏差影响。文献[11]提出了3种三频PPP模型,实验结果表明,三频PPP较传统双频PPP可缩短约10%的收敛时间,当收敛后,二者定位精度相当。文献[12]基于全球大量测站的GPS单系统数据,进行了三频实验,研究表明,受噪声系数以及待估参数的不同影响,三频PPP定位模型间存在性能差异。文献[13-14]基于BDS三频数据也展开了相关三频PPP定位算法等研究。目前大部分文献仅针对BDS或GPS单系统三频PPP定位性能评估,关于多系统组合三频PPP定位性能,以及多系统组合对BDS单系统定位性能的提升尚有待深入研究。因此,本文首先通过合理参数化,推导了2种满秩可估的三频PPP函数模型,包括非差非组合模型和双无电离层组合模型,并给出了2种模型拓展到多系统中的具体表达。随后采用BDS、GPS和Galileo 三系统观测数据对2种三频PPP模型的定位性能进行了评估。
1 三频PPP定位模型
1.1 GNSS观测方程
令接收机为r、卫星为s,则载波相位Φ和伪距P的观测方程[15]为

式中:下标j为频率编号为卫星与测站之间的几何距离;对流层延迟为频率f1的斜路径电离层延迟,为频率相关的电离层延迟因子;dtr和sdt分别为接收机钟差和卫星钟差;Bj,r和分别为频率fj上的接收机和卫星相位硬件延迟;Dj,r和分别为频率fj上的接收机和卫星的码硬件延迟;是吸收了接收机与卫星初始相位偏差的模糊度;Φε和Pε为相位和伪距的观测噪声,包含了各自多路径效应等其他未模型化误差。需要特别注意的是,各表达量均以m为单位。观测方程中的其他误差项(如:天线相位中心改正、相位缠绕效应、潮汐负荷变形、相对论效应和地球自转等)均采用模型改正[16]。
式(1)中的卫星钟差、接收机钟差、硬件延迟、电离层延迟及模糊度等参数相关,这势必导致法方程秩亏。因此,需要通过合理参数化的方式解决参数不可估的问题[17]。为了便于表达,定义参数为

式中:ijα和ijβ分别为频率fi和fj的无电离层组合系数;分别为卫星端和接收机端的差分码偏差。
首先,采用德国地学研究中心(Deutsches Geo Forschungs Zentrum, GFZ)提供的精密钟差产品改正卫星钟差,其中BDS、GPS、Galileo三个系统解算的基础频点分别为B1I/B3I、L1/L2、E1/E5a。由于精密卫星钟差dtsIF是基于双频无电离层组合解算的,吸收了各系统解算基础频点的无电离层组合的卫星端码硬件延迟[18],即

因此,卫星s的钟差和频率fj的卫星端,码硬件延迟可通过精密钟差及DCB产品进行改正,即

类似地,接收机钟差、接收机端码硬件延迟和电离层参数间存在相关性。为了独立参数化,参考文献[17],定义无电离层钟差参数为

相对码延迟参数(relative inter-frequency code bias, RIFCB)δD1j为

显然,无电离层钟差dtrIF吸收了无电离层组合的双频硬件延迟。采用这两个参数,则任意频率的接收机钟差与其硬件延迟之和,以及电离层参数可表达为:

经过精密产品改正及合理的参数化处理,观测方程式(1)可表达为

1.2 三频非差非组合模型
根据基本式(9),则观测n颗卫星的单历元三频非差非组合观测方程为

1.3 三频双无电离层组合模型
无电离层组合利用电离层延迟的数值特性,通过线性组合消除其一阶项的影响。根据等价性原理,每颗卫星的三频伪距和相位观测值可构成5个无电离层组合观测值,其中有一个是由相位和伪距构成的无电离层组合。研究表明,尽管该方式能充分利用所有观测值信息,但这个相位和伪距构成的无电离层组合带来的信息增益非常有限,且导致5个无电离层组合观测值相关,处理相对比较复杂[19]。因此,本文采用三频伪距和相位观测值分别构成双无电离层组合的模型。一般而言,三频观测值可以组成三个无电离层组合。各系统采用的三频观测值如表1所示,其中BDS在采用B1I和B3I基础上,BDS-2和BDS-3分别各自采用了B2I和B2b频点。考虑到噪声系数的影响,未采用BDS的B2b(B2I)/B3I、GPS的L2/L5和Galileo的E5a/E5b无电离层组合。
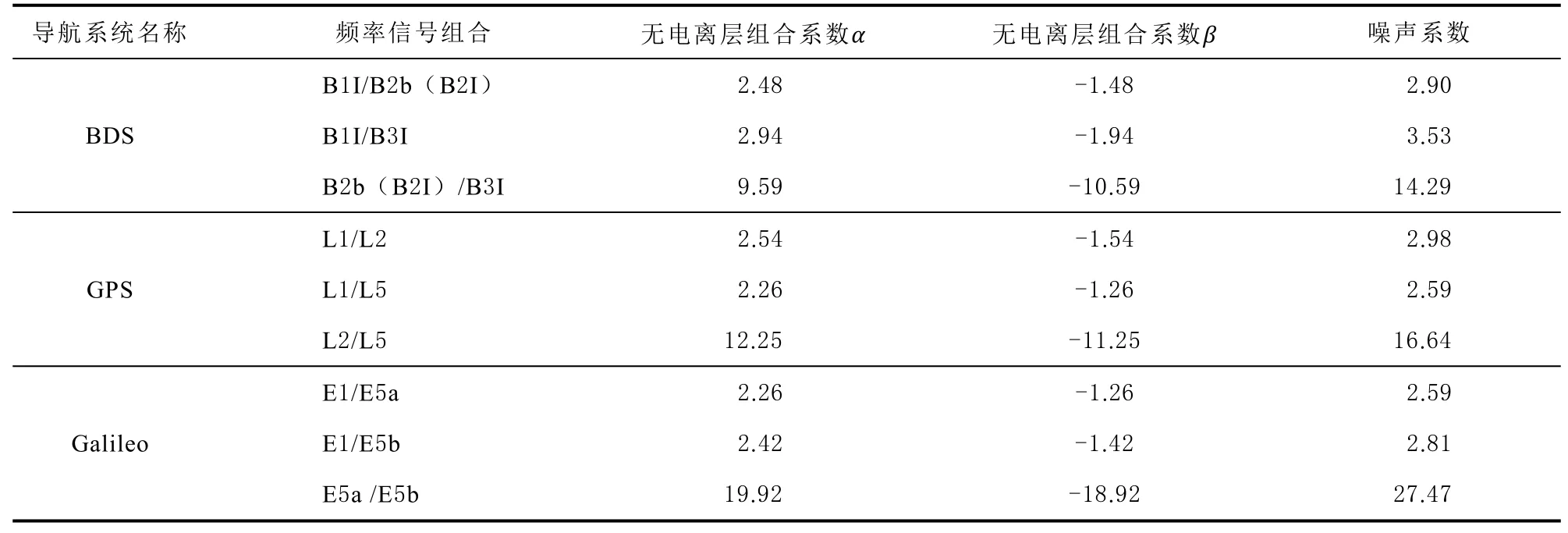
表1 BDS、GPS、Galileo双频无电离层组合系数及噪声系数
三频双无电离层组合模型可通过对非差非组合观测方程(10)左乘一个转换矩阵3R得到,其中

变换后得三频双无电离层组合模型为

1.4 多系统三频PPP模型
本文研究的多系统包括BDS、GPS和Galileo。多系统融合的关键之一是合理地处理系统间硬件延迟偏差。通常有2种处理方式:一种是每个系统独立估计各自的接收机无电离层钟差;另一种是引入系统间码硬件延迟偏差参数(inter-system code hardware bias, ISCB)[20],考虑到ISCB的稳定性,从而减少待估接收机无电离层钟差参数。本文采用引入ISCB参数方式,BDS和Galileo的接收机钟差为

式中:下标G、C和E分别代表GPS、BDS和Galileo;ηCG=DrIF,C-DrIF,G和ηEG=DrIF,E-DrIF,G分别为BDS和Galileo的ISCB参数,其中DrIF=α12Dr,1+β12Dr,2,为接收机端码硬件延迟无电离层组合。因此,三系统三频非差非组合模型为

类似地,三系统双无电离层模型拓展到多系统为

2 三频PPP的随机模型
本文采用的相位观测值天顶方向的观测精度σ90°为2 mm,相位和伪距观测值精度比为1∶100。采用卫星高度角函数确定观测值间关系,则非差非组合PPP随机模型为


3 实验与结果分析
3.1 实验数据及解算策略
选取了12个包含GPS、BDS和Galileo三频观测值的国际GNSS服务(International GNSS Service, IGS)组织建立的多模GNSS实验跟踪网(multi-GNSS experiment, MGEX)测站,测站分布如图1所示,数据选取了2019年年积日第121—130天共10 d数据,数据采样间隔为30 s。分别利用BDS单系统和三系统组合的三频和双频观测数据进行静态和模拟动态实验。

图1 实验所选取的12个IGS MGEX观测站分布
为了充分评估双频和三频PPP不同定位模型在静态和动态模式下的性能,采用4种评估方案:①双频非差非组合模型(DF-UC);②双频无电离层模型(DF-IF);③三频非差非组合模型(TF-UC);④三频双无电离层组合(TF-DIF)。
针对这4种方案,采用定位精度和收敛时间两个指标分析了BDS单系统与三系统组合定位效果,收敛条件为三个方向同时达到收敛阈值且连续60个历元(采样时间为30 min)均稳定在阈值内,以IGS中心SINEX文件中的坐标作为各测站的参考坐标。具体的PPP数据处理策略如表2所示。
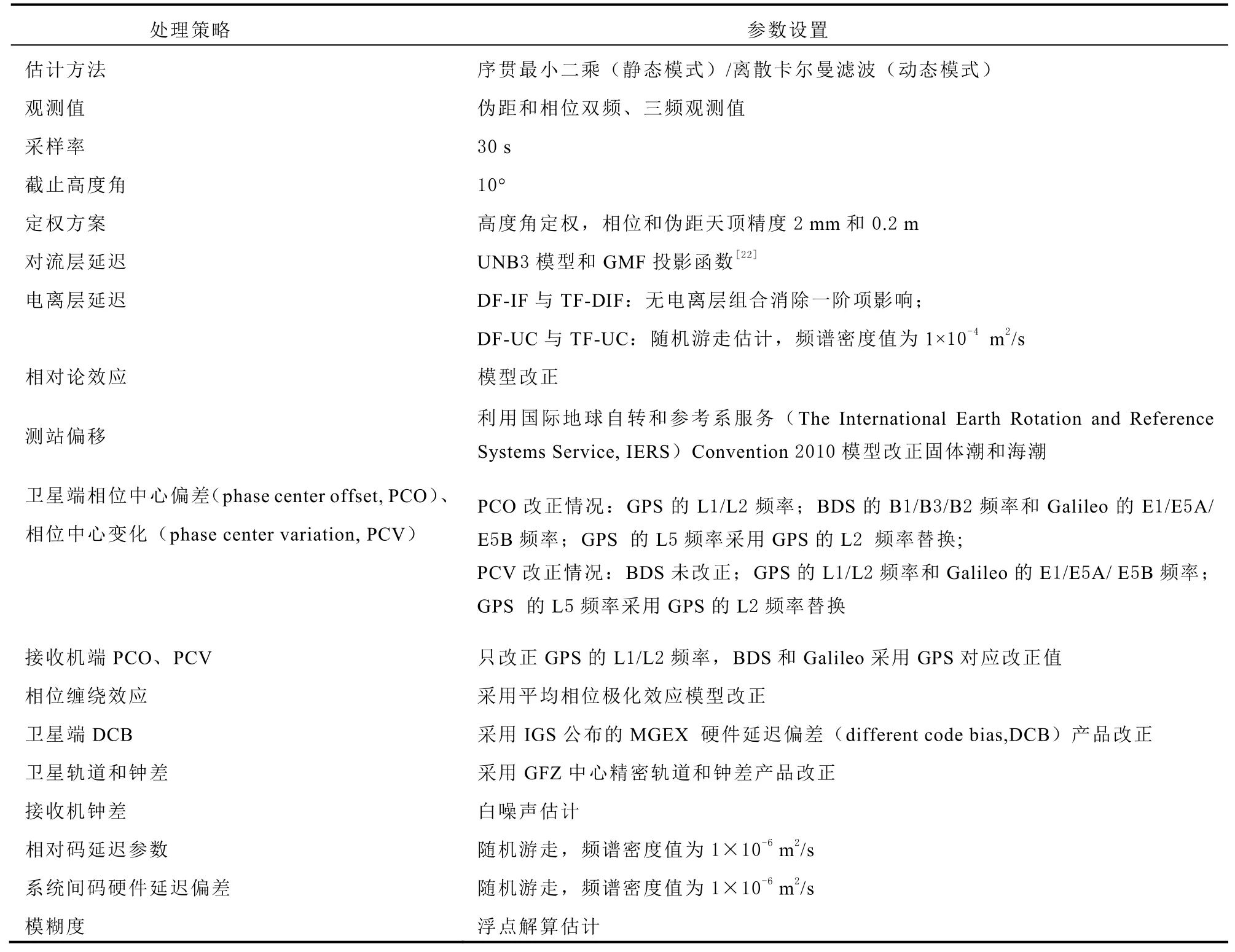
表2 实验数据PPP处理策略
3.2 静态PPP实验
3.2.1 BDS定位性能分析
图2给出了2019年年积日第124天FFMJ、LEIJ和ULAB三个测站BDS单系统可视卫星数目与位置精度衰减因子(position dilution of precision,PDOP)值随时间变化情况。FFMJ与LEIJ测站位于欧洲中高纬度地区,观测的地球静止轨道(geostationary Earth orbit, GEO)与倾斜地球同步轨道(inclined geosynchronous orbits, IGSO)卫星数较少,导致PDOP值较差;且随中圆地球轨道(medium Earth orbit, MEO)卫星数量的变化,数值波动较大。图3为BDS静态PPP双频和三频2种模型在E、N和U方向以及3维点位的误差序列。在定位初始化阶段,同一时刻2种模型的三频PPP定位性能相比于双频均有明显提高,可视卫星几何分布较差的FFMJ与LEIJ测站改善效果更加明显。
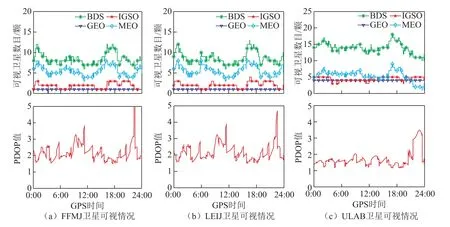
图2 FFMJ、LEIJ和ULAB测站可视的BDS可视卫星数目与PDOP值

图3 FFMJ、LEIJ和ULAB测站BDS单系统静态PPP定位误差(0时至4时)
图4给出了4种方案所有测站连续10 d收敛至不同阈值的单天解均方根(root mean square,RMS)和收敛时间的平均值。当收敛阈值为0.1 m时,DF-UC模型E、N和U三个方向RMS分别为1.62、1.18和4.19 cm;TF-UC模型为1.42、1.05和3.87cm,提升约12.3%、11.0%和7.6%。DF-IF

图4 BDS单系统静态PPP四种方案不同收敛阈值单天解RMS和收敛时间平均值
模型E、N和U三个方向RMS分别为1.28、0.95和2.33 cm,TF-DIF模型分别为1.14、0.86和2.18 cm,提升约10.6%、9.1%和6.4%。从定位精度角度比较三频相比于双频的提升,TF-UC模型略优于TF-DIF模型。当收敛阈值达到0.1、0.5和1 m时,TF-UC较DF-UC模型分别提高了10.0%、10.4%和16.4%;TF-DIF较DF-IF模型分别提高了13.7%、16.4%和18.3%。从收敛时间角度比较三频相比于双频的提升,三频PPP可有效缩短收敛时间,尤其是初始化收敛阶段并且TF-DIF模型优于TF-UC模型。
从以上算例可以分析得出:由于TF-UC模型待估参数较多且参数之间存在一定时空相关性;因此导致在初始收敛时间方程性态差,收敛时间长。TFDIF模型由于组合观测值之间的相关性导致该模型在定位精度上提升不如TF-UC模型明显。
3.2.2 三系统组合定位性能分析
图5给出了FFMJ、LEIJ和ULAB三个测站三系统组合的可视卫星数目与PDOP值。三系统组合的PDOP值在1左右,显著小于BDS单系统,即多系统组合有效改善了可视卫星的空间分布几何构型。图6展示了上述三个测站静态PPP四种方案的定位误差,由图看出三频略优于双频定位结果,较BDS单系统有明显提高。
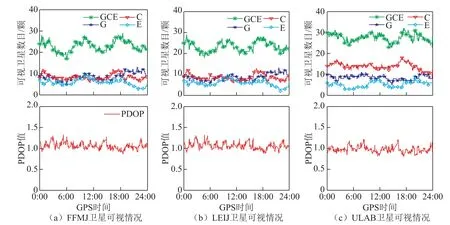
图5 FFMJ、LEIJ和ULAB测站可视的三系统可视卫星数目与PDOP值

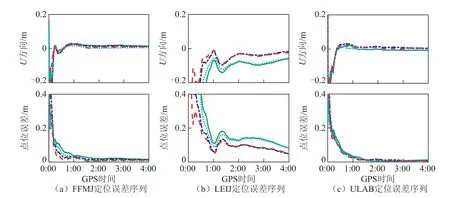
图6 FFMJ、LEIJ和ULAB测站三系统静态PPP定位误差(0时至4时)
图7统计了三系统组合的4种PPP方案所有测站连续10 d收敛至不同阈值的单天解RMS定和收敛时间的平均值。当收敛阈值为0.1 m时,DF-UC模型在的E、N和U三个方向的RMS分别为0.82、0.55和1.23 cm,TF-UC模型为0.71、0.49和1.13 cm,相对提升了13.4%、10.9%和8.0%。DF-IF模型三个方向RMS分别为0.81、0.53和1.07 cm,TF-DIF模型分别为0.72、0.48和1.02 cm,对应提升了11.1%、9.1%和4.6%。三系统组合与BDS单系统相比,三个方向的TF-UC模型分别提高了50.0%、53.3%和70.8%,TF-DIF分别提高了36.8%、44.2%和53.2%。由图7(b)得出收敛至0.1 m时,三系统组合的TF-UC和TF-DIF模型仅需21.7 min和18.6 min,较BDS单系统分别提高了77.6%、78.6%。但是就三系统组合而言,三频较双频的收敛时间提升不明显,这主要是因为三系统组合的卫星数目充足且分布合理,PDOP值得到了极大改善,使得三频对收敛时间的增益有限。

图7 三系统组合静态PPP四种方案在不同收敛阈值下的单天解RMS和收敛时间
3.3 模拟动态PPP实验
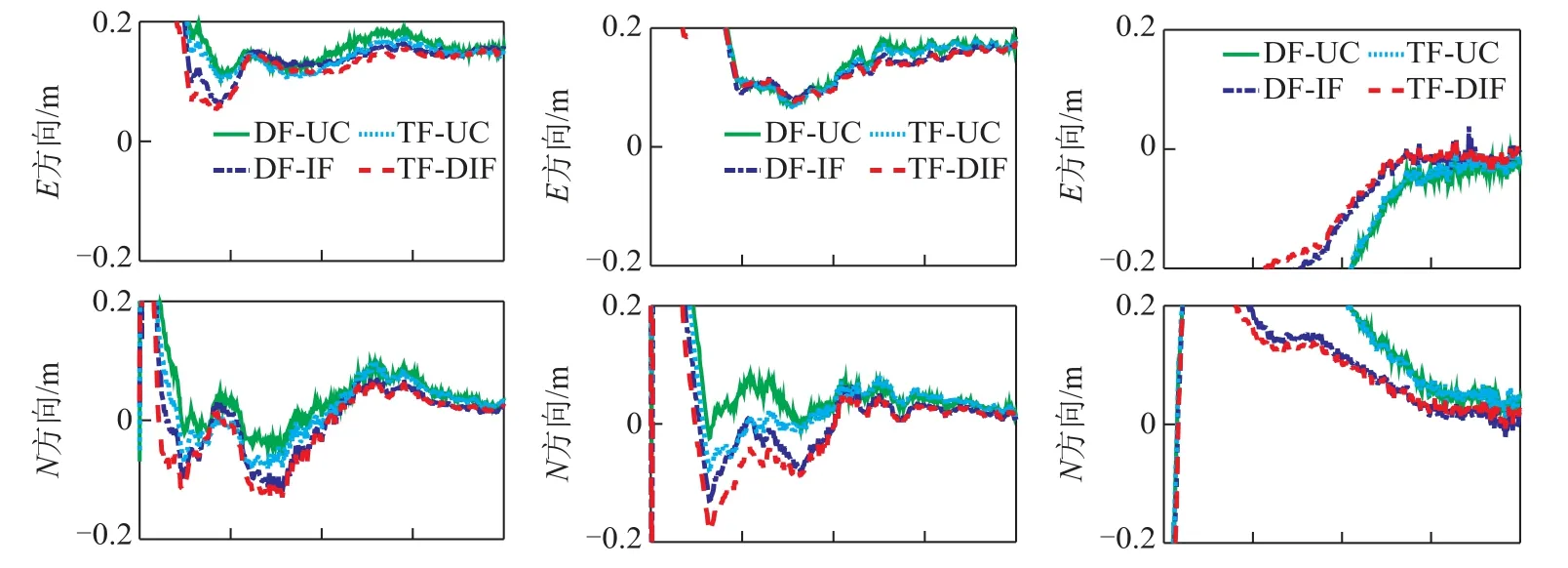
图8给出了BDS单系统FFMJ、LEIJ和ULAB三个测站动态PPP在(0:00—4:00)时段E、N和U三个方向以及3维点位的误差序列图。在初始化阶段,三频TF-UC和TF-DIF模型较双频模型具有更高的定位精度。

图8 FFMJ、LEIJ和ULAB测站BDS单系统动态PPP定位误差(0时至4时)
图9给出了三系统组合动态PPP的定位误差,相较于BDS单系统,三系统组合动态定位结果更加稳定,收敛更快。

?

图9 FFMJ、LEIJ和ULAB测站三系统组合动态PPP定位误差(0时至4时)

表3 BDS单系统动态定位性能统计

表4 三系统组合方案动态定位性能统计
表3和表4分别统计了12个测站10 d数据BDS单系统和三系统组合定位三个方向同时收敛至0.1 m的RMS和收敛时间。结果表明,BDS单系统和三系统组合三频定位模型结果在三个方向上的定三精度和收敛时间均优于双频模型定位结果。三系统组合的三频TF-UC模型三个方向精度分别为1.42、1.03和2.89 cm,相比BDS单系统提高了39.1%、51.2%和44.8%。三系统组合三频TF-DIF模型三个方向精度分别为1.36、0.97和2.81 cm,相比BDS单系统提高了41.8%、53.6%和45.9%。同时,三系统组合三频定位模型相比BDS单系统三频定位模型的收敛时间显著缩短,TF-UC模型的收敛时间从144.5缩短至24.0 min,TF-DIF模型的收敛时间从123.7缩短至22.8 min,分别提高了83.4%、81.6%。
4 结束语
本文从基本观测方程出发,详细地介绍了2种三频PPP定位模型:非差非组合模型和双无电离层组合模型。通过实验,从定位精度与收敛时间2个角度比较与分析得出以下结论:
1)在卫星分布较少、PDOP值较差的情况下,三频PPP相比双频PPP可以有效提高定位结果的精度与可靠性,尤其是在定位初始阶段。
2)相较于双频PPP,三频PPP两种定位模型的定位性能均有所提高。定位精度方面,非差非组合模型提升优于双无电离层组合模型;收敛时间方面,双无电离层组合模型提升优于非差非组合模型。
3)受益于GPS、Galileo和BDS融合对卫星空间几何分布构型的改善,三系统组合的三频PPP定位性能较BDS单系统有大幅度的提升。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年2期)2022-04-11
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2022年1期)2022-02-17
全球定位系统(2021年2期)2021-05-24
中国电气工程学报(2019年18期)2019-10-21
卷宗(2017年1期)2017-03-17
现代电子技术(2009年9期)2009-06-25
现代电子技术(2009年7期)2009-06-25