GNSS反射测量技术在水位变化探测中的应用
2021-03-01 15:47窦邵华龚春龙刁锦通程铭宇
导航定位学报 2021年1期
窦邵华,何 骞,龚春龙,刁锦通,程铭宇
(1. 广州市城市规划勘测设计研究院,广州 510060;2. 深圳市水务规划设计院股份有限公司,广东 深圳 518001)
0 引言
水资源与人类的生活息息相关,对水位变化进行监测,对人类科学合理地保护利用水资源具有重要意义。如对大坝进行水位监测,可以更好地确保大坝安全运行;对航道进行水位监测,可以更好地确保船只安全航行;对海平面进行水位监测,可以更好地研究海面变化规律。
1993年,文献[1]提出全球定位系统(global positioning system, GPS)反射测量技术,开启了利用全球卫星导航系统反射测量(global navigation satellite system reflectometry, GNSS R)方法遥感地球表面这一新的领域。文献[2]对GPS信噪比(signal-to-noise ratio, SNR)观测值中直射信号、反射信号的分离及反射信号与反射环境之间的关系进行了研究。文献[3]提出利用常规测量型GPS接收机进行地表参数信息反演的方法,进一步拓宽了GNSS在遥感领域的发展和应用。文献[4]对GNSS R技术的进展和应用前景进行了综述介绍,讨论了GNSS R原理和方法及最新的应用进展。目前国内外学者在水位变化监测方面,主要采用的方法是信噪比技术,文献[5-11]从原理到应用等多个方面,对GNSS R在潮位变化监测中的应用进行了深入研究,结果表明:GNSS R技术获取的潮位变化与验潮站连续观测结果的一致性较好,反演精度在分米级,可以作为验潮站的有效补充,进一步拓宽了GNSS在海洋遥感领域的应用。文献[12]对GNSS R技术在大坝水位变化探测中的应用进行了研究,结果表明:GPS L1频率和北斗卫星导航系统(BeiDou navigation satellite system, BDS)B1频率可以最大限度地保证卫星利用率和反演成功率,反演结果与实测结果的相关系数可达0.9以上。文献[13-14]对GNSS R技术在河水面测高中的应用进行了分析,结果表明:GPS干涉反射测量(GPS interferometric reflectometry, GPS-IR)技术在水面相对平静且变化平缓的水域有着很好的测高精度。
对于水面而言,有波动比较大的海面,也有比较平静的大坝水面,有水域面狭长的航道,也有水域开阔的海面。为了综合分析GNSS R技术在不同水域环境下水位变化监测的精度,本文对大坝、航道以及海面3种不同水域环境进行水位变化的探测分析。
1 GNSS R探测水位变化相关理论
1.1 GNSS R原理
多路径效应是影响GNSS高精度定位的主要误差,它与反射面的结构以及电介质参数等密切相关。当卫星高度角较低时,接收机接收到的反射信号会和直射信号发生相干作用。GNSS R反射测量技术正是利用直射信号和反射信号之间的延迟,再根据卫星、接收机和反射点之间的几何关系来反演地表参数特征的。测量方式分为双GNSS天线法和单GNSS天线法。本文主要针对单GNSS天线法,并对利用SNR技术进行水位探测的原理进行介绍。GNSS R探测水位变化的原理如图1所示。

图1 GNSS+R探测水位变化原理
图1中:e表示卫星高度角,即信号入射角,单位为(°);h为接收机天线相位中心到反射面的垂直距离,单位为m;δ为直射信号和反射信号的程差,单位为m。由于程差的存在,直射信号和反射信号之间会存在相位延迟ψ,以rad为单位,即

式中λ为载波波长。从式(1)可以看出,直射信号和反射信号之间的相位延迟与卫星高度角有关,因此随时间变化而变化。对于测量型GNSS接收机,当存在反射信号时,由几何关系可知,接收到的复合信号可以表示为

式中:CA为复合信号的振幅;dA为直射信号的振幅;rA为反射信号的振幅。
当卫星高度角较低时,由于低高度角时多路径和天线增益模式的影响,直射信号决定了复合信号的整体变化趋势。为了提取能够反演地表参数的反射信号信息,需要对信噪比数据使用低阶多项式去除趋势项。结合式(1),去除趋势项后的信噪比残差序列可以表示为

式中A为信号振幅。设t=sine,,则式(3)可以表示为

式(4)中的频率f包含了接收机相位中心至反射面的垂直距离h,因此对去除趋势项的信噪比残差序列进行频谱分析,获取振幅最大值所对应的频率值,便可以得到接收机相位中心至反射面的垂直距离,从而实现利用GNSS信噪比数据反演水面水位。由于t是卫星高度角的正弦函数值,为非等间隔采样,因此采用洛姆-斯卡吉尔(Lomb-Scargle, L-S)频谱分析方法进行处理。
1.2 菲涅尔反射区计算
根据惠更斯-菲涅尔原理,菲涅尔反射区是在收发天线之间,对于波长为λ的电波,由电波的直线路径与折线路径的行程差为的折点(反射点)形成的,以收发天线位置为焦点,以直线路径为轴的椭球面。其中n=1的区域是接收点信号最强的区域,称为第一菲涅尔区,如图2所示。为了更好地应用于GNSS R技术,国外学者拉森(Larson)[15]对第一菲涅尔反射区的表达式进行了修正,可以表示为:
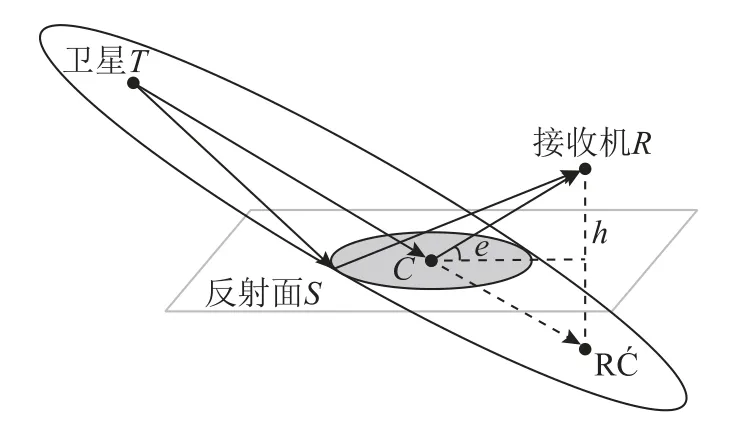
图2 菲涅尔反射区示意图

式中:(Cx,Cy)为反射区中心点C的坐标;a为反射区椭圆的长半轴;b为反射区椭圆的短半轴。
1.3 卫星反射点轨迹计算
卫星天空视图可以反映卫星的空间几何分布,卫星反射点轨迹则能更直观地反映可以用于水位探测的卫星数据分布。结合卫星、反射点与接收机的几何关系,卫星反射点轨迹可以表示为:

式中:x为反射点轨迹在X轴的分量;y为反射点轨迹在Y轴的分量;θ为卫星方位角。
2 实验与结果分析
2.1 实验设计
为了分析GNSS R技术在不同水域环境中水位探测的精度问题,本文选取了大坝、航道和海面3种典型水域环境进行反演分析,水域环境特点及实验数据如表1和表2所示。

表1 水域环境特点

表2 实验数据
由于GNSS R技术得到的是反射面到天线相位中心的高度,水位数据为实测水位高度,为了更好地对比分析二者之间的差距和相关性,本文对2种测量方法得到的水位变化量进行对比分析,其中水位变化量表示为

式中:Δw为水位变化量;iw为第i个水位观测值;n为观测值的个数。
考虑到实测水位采样率以及反演水位时刻的不确定性,采用表3的预处理策略对成果数据处理之后再进行对比分析。
2.2 大坝水位变化探测结果分析
大坝GNSS数据采用的是深圳茜坑水库变形监测系统采集的数据。XK03测站位置如图3所示。

表3 反演水位变化量与实测水位变化量对比分析预处理策略

图3 XK03测站位置
结合图3测站位置及周边环境情况,大坝实验数据采用方位角为220°~350°的数据进行反演分析。为了选择合适的卫星观测高度角进行反演分析,本文模拟了当反射面到接收机天线相位中心的垂直距离为6 m时,XK03测站周边的菲涅尔反射区如(图4所示)。

图4 XK03菲涅尔反射区
从图4可以看出,当卫星高度角在5°~15°范围内变化时,接收机可以接收到测站周边120 m范围内的反射信号,并且卫星高度角越高,反射区域距离接收机天线越近,反射范围也越小。
为了更好地了解反演分析所采用的卫星数据的情况,本文以GPS为例绘制了XK03测站同时满足方位角和高度角要求的卫星数据的反射点轨迹,如图5所示。图5反映了用于大坝水面高度反演分析的各GPS卫星对应的反射点轨迹。综合测站周边及数据情况,为了获得更高精度的反演结果,XK03测站采用卫星高度角在5°~15°范围内的数据进行反演解算。

图5 XK03测站反射点轨迹
以G29卫星为例,卫星去除趋势项后的信噪比数据与卫星高度角的关系如图6所示,可以看出二者之间存在正弦函数关系,符合式(3)所表达的关系。结合式(4),采用L-S频谱分析方法可以得到如图7所示的结果。

图6 去除趋势项信噪比

图7 L-S频谱分析
图7中频谱振幅最大所对应的高度H即为反射水面到天线相位中心的距离h,从图7可以看出,G29卫星反演的水面到天线相位中心的距离为5.71 m。
GPS和BDS反演的水位变化量与实测水位变化量的对比结果如图8所示。
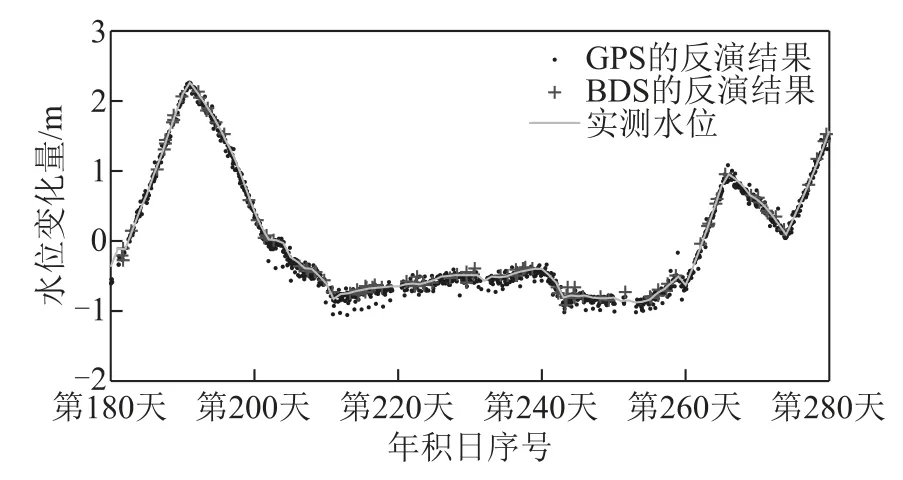
图8 反演水位变化量与实测水位变化量
由于GNSS R技术每天可以反演得到多个水位变化量结果,而实测数据只有1个,为了进行统计分析,考虑到大坝1 d之中水位变化量较小,将1 d之中GPS和BDS各自的反演结果求平均后作为当天反演的水位变化量结果,与当天实测水位变化量作差之后的差值如图9所示。
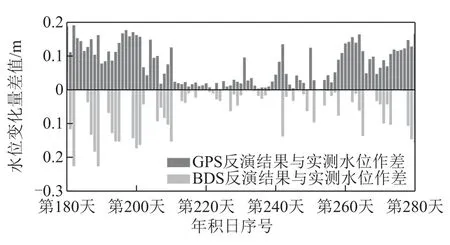
图9 GNSS反演水位变化量与实测水位变化量的差值
从图8可以看出,2种导航卫星系统的反演结果与实测结果趋势基本一致,GPS反演的结果较多,BDS反演的结果较少。分析原因为由于大坝所处的位置以及能够接收到的BDS卫星个数较少,符合水位反演条件的卫星个数较少,因此得到的反演结果也比较少。
统计结果显示,XK03测站GPS反演水位变化量与实测水位变化量的差值的均方根(root mean square, RMS)值为0.11 m,BDS反演的RMS值为0.09 m。考虑到GPS反演的结果在1 d之中多个时段有分布,本文求平均的方法会降低GPS反演的精度,因此认为BDS反演精度和GPS反演的精度相当。
GPS和BDS反演水位变化量与实测水位变化量的相关性分析分别如图10和图11所示。从图10和图11可以看出,二者的反演结果与实测结果的相关系数均达到0.99。结合前面的结果,表明BDS和GPS均可以较好地反演大坝的水位变化情况。

图10 GPS反演水位与实测水位相关性分析
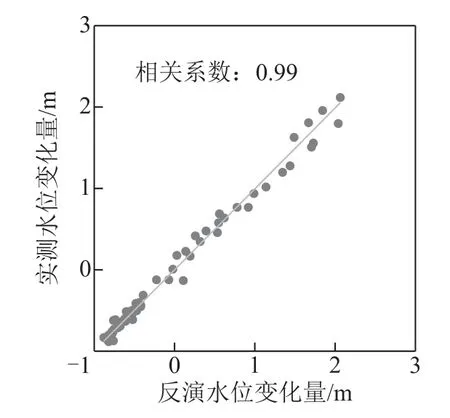
图11 BDS反演水位与实测水位相关性分析
2.3 航道水位变化探测
航道GNSS数据来自法国国家地理和森林信息研究所(Institut National de l'information Géographique et Forestière, IGN)的BRST站,BRST站位置如图12所示。

图12 BRST测站位置
结合图12测站位置及周边环境情况,航道实验数据采用方位角为130°~270°的数据用于反演分析。为了选择合适的卫星观测高度角进行反演分析,本文模拟了当反射面到接收机天线相位中心的垂直距离为15 m时,BRST站周边的菲涅尔反射区(如图13所示)。从图13可以看出,当卫星高度角在15°~40°范围内时,接收机可以接收到周边80 m范围的反射信号。
为了更好地了解反演分析所采用的卫星数据的情况,本文以GPS为例,绘制了BRST站同时满足方位角和高度角要求的卫星数据的反射点轨迹如图14所示。
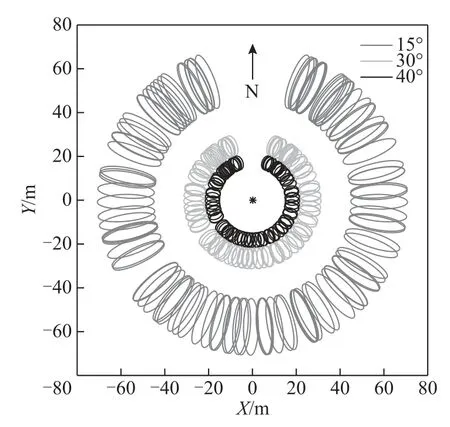
图13 BRST测站菲涅尔反射区

图14 BRST测站反射点轨迹
图14反映了用于航道水面高度反演分析的各GPS卫星对应的反射点轨迹。考虑到航道宽度限制,当卫星高度角低于15°时,接收机接收到的反射信号将不来自于水面。因此,BRST测站采用卫星高度角在15°~40°范围内的数据进行反演解算。
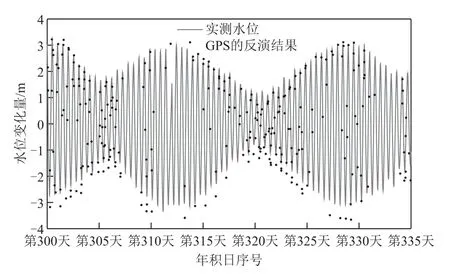
图15 反演水位变化量与实测水位变化量

图16 反演水位与实测水位相关性分析
BRST测站GPS反演的水位变化量与实测水位变化量的对比如图15所示,二者相关性如图16所示。从图15、图16可以看出,反演结果与实测结果基本一致。统计结果显示BRST站GPS反演水位变化量与实测水位变化量的差值的RMS值为0.58 m,相关系数达0.94。分析原因是由于航道宽度限制,反演所采用的数据卫星高度角较大,所以航道反演精度比大坝数据反演的精度低。
2.4 海面变化探测
海面GNSS数据来自美国国家大地测量局(The National Geodetic Survey, NGS)连续运行基准站(continuously operating reference station,CORS)的CACC站。CACC测站位置如图17所示。

图17 CACC测站位置
结合图17测站位置及周边环境情况,海面实验数据采用方位角为240°~360°的数据用于反演分析。为了选择合适的卫星观测高度角进行反演分析,本文模拟了当反射面到接收机天线相位中心的垂直距离为6 m时,CACC站周边的菲涅尔反射区(如图18所示)。从图18可以看出,当卫星高度角在5°~15°范围内时,接收机可以接收到周边120 m范围的反射信号。
为了更好地了解反演分析所采用的卫星数据的情况,本文以GPS为例绘制了同时满足方位角和高度角要求的卫星数据的反射点轨迹(如图19所示)。图19反映了用于海面高度反演分析的各GPS卫星对应的反射点轨迹。综合测站周边及数据情况,为了获得更高精度的反演结果,CACC站采用卫星高度角在5°~15°范围内的数据进行反演解算。

图18 CACC测站菲涅尔反射区

图19 CACC测站反射点轨迹
CACC站GPS反演的水位变化量与实测水位变化量的对比如图20所示,二者相关性如图21所示。
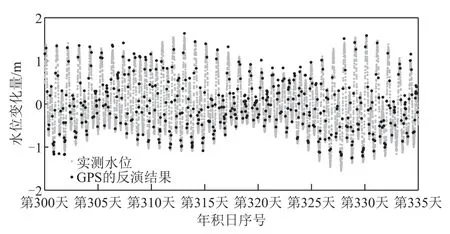
图20 反演水位变化量与实测水位变化量

图21 反演水位与实测水位相关性分析
从图19、图20可以看出,反演结果与实测结果基本一致。统计结果显示,GPS反演水位变化量与实测水位变化量的差值的RMS值为0.16 m,相关系数达0.96。这是由于海面数据波动较大,导致数据反演精度较大坝水位反演精度低,但是所采用的数据卫星方位角较低,因此海面反演精度优于航道数据反演精度。
不同水域环境,GNSS R水位探测结果的对比分析如表4所示,其中变化量差值为采用不同测量方法得到的水位变化量的差值。

表4 不同水域环境GNSS+R水位探测结果对比分析
3 结束语
GNSS成为地表环境监测的新兴遥感手段。本文在详细介绍GNSS R基本原理及如何通过菲涅尔反射区和卫星反射点轨迹选择合适GNSS卫星信号数据的基础上,对大坝、航道以及海域3种水域环境的数据进行了反演分析,验证了GNSS R技术在水位变化监测应用中的可行性。实验结果表明:
1)在3种水域环境下,GNSS R反演结果和实测数据在整体趋势上吻合较好,大坝水位反演精度最高,BDS和GPS反演水位变化量与实测水位变化量相关系数均达到0.99,并且在该环境下,BDS反演水位变化量与实测水位变化量的差值的RMS值为0.09 m,GPS得到的RMS为0.11 m,考虑到GPS反演的结果在1 d之中多个时段有分布,本文求平均的方法会降低GPS反演的精度,因此认为BDS反演精度和GPS反演的精度相当;在航道环境中,由于采用数据的卫星高度角相对较高,反演精度最差,GPS反演水位变化量与实测水位变化量相关系数达0.94,二者差值的RMS值为0.58 m;在海域环境中,GPS反演水位变化量与实测水位变化量相关系数达0.96,二者差值的RMS值为0.16 m。
2)GNSS R技术在水位变化探测应用中,水位变化的剧烈程度和可用于GNSS R反演解算的卫星高度角,对于水位反演精度的影响很大,水位变化相对平缓、反演数据使用的卫星高度角相对较低时,均可提高反演的精度。
猜你喜欢
中等数学(2022年5期)2022-08-29
测绘地理信息(2022年2期)2022-04-02
全球定位系统(2021年2期)2021-05-24
学校教育研究(2018年8期)2018-07-09
百科知识(2018年6期)2018-04-03
地震研究(2017年3期)2017-11-06
少儿科学周刊·少年版(2016年4期)2017-02-15