机非标线分隔道路电动自行车越线风险模型
2021-03-05 04:29南斯睿胡文斌陈宽民
重庆交通大学学报(自然科学版) 2021年2期
李 岩,南斯睿,胡文斌,汪 帆,陈宽民
(1.长安大学 运输工程学院,陕西 西安 710064;2.东南大学 交通学院, 江苏 南京 211189;3.甘肃路桥新路交通工程有限公司,甘肃 兰州 730030)
0 引 言
电动自行车舒适、快速、经济、环保[1],迅速成为各国居民主要出行方式[2,3],尤为适用于城市范围内5~10 km距离的出行[4]。电动自行车种类较多,一般根据动力驱动形式、最大功率和最高行驶车速等要素分类[5]。我国最新技术标准将电动自行车视为非机动车,将限速从20增为25 km/h[6]。调查发现,电动自行车行驶速度仍多高于此限速,且平均行驶速度比传统自行车高40%~50%[7,8]。较高的速度差异,使需行驶于非机动车道的电动自行车难以达到行驶期望,改造其常选择进入相邻的平均速度较高的机动车道,并出现频繁驶入驶出非机动车道的情形[9],此现象在机非标线隔离的道路更为严重。因电动自行车需越过机非隔离标线,可简称为越线行为。综上,电动自行车的广泛应用,使非机动车流速度离散程度提升[10],传统混合交通流演化为多元机非混合交通流。而多元混合流时空相互作用的复杂度远高于传统混合交通流,使常规管控措施难以优化,造成道路时空资源利用效率降低,交通安全隐患急剧提升。
当电动自行车所处行驶条件无法满足行驶期望时,会产生越线行为动机[11]。杭州市实测数据发现,非机动车越线行为主要与路段内自行车交通流量、自行车运行速度、机动车交通流速度标准差及路段车道数、自行车的15%位车速等因素有关[12],但未能对各因素的重要程度进行分析[13]。西安市实测数据表明,当机非横向间距大于2 m时相互影响较小[9],横向间距小于1 m的情况很少见[14]。由此可见当非机动车越线时,对机动车的行驶及自身安全均会造成极大影响[15]。非机动车的越线概率可用概率模型描述[16],计算以速度差表示的越线需求和相邻机动车道的车头间距,并通过这两个独立概率事件的乘积来获取非机动车的越线概率;也可通过元胞自动机中,统计元胞变化状况对机非混合流的作用机理进行描述;但多描述的宏观状态,对微观行为观测不足[17,18]。
回归统计及概率模型两类方法均可描述机非的相互作用,但多未针对电动自行车的运行特性进行标定。虽已建立部分概率统计模型描述非机动车越线行为,但模型拟合效果仍有待提升,更少见越线行为机理等角度的交通管理方向建议。电动自行车广泛应用后,多元混合流的交通特性发生了较大变化,电动自行车越线概率远高于传统自行车,因此需对电动自行车越线进入机动车道行驶的行为机理深入分析,以获取各情境下使电动自行车越线行为的诱因。
生存分析(survival analysis)是在综合考虑事件发生的内因和外因基础上,对与事件发生相关问题提供统计规律的一种分析与推断方法[19]。生存分析对交通运输领域中的研究多与时间相关,主要包含交通事故持续时间分析[20,21]、行人或非机动车过街分析[22,23]、交通拥堵持续时间分析[24],出行时间分析[25]等。相比概率模型,生存分析模型可用于分析交通参数较难确认服从何种分布时的影响因素。生存分析模型可通过考虑删失数据(censored data),统计每个观测出现某类行为(如电动自行车越线行为)的概率,从而获取该种因素对整体事件的影响,适用于传统模型较难建模的电动自行车越线进入机动车道行驶行为分析。因此,笔者选取与越线行为直接相关的电动自行车越线车速为自变量,建立基于生存分析的风险模型,明晰电动自行车越线的关键诱因及越线时机,定量分析各影响因素下的越线风险,为优化交通设施设计,提升道路交通管理水平,实现精准化设计、精细化管理提供依据。
1 电动自行车越线行为诱发因素
相对于机动车辆,电动自行车具备车体小、转向灵活、稳定性差等特点[26]。在当前车道行驶无法满足骑行者行驶期望时,可利用车身尺寸小、转向灵活的特点穿插于机动车道、非机动车道和人行道之间,或穿行于道路前方障碍物间。机非标线分隔道路未设置物理分隔设施,对电动自行车约束小,易出现越线行驶行为。
根据电动自行车在行驶过程中在运动过程中是否受其他车辆或障碍物等因素的影响,越线行为可被分为自由骑行越线和受阻骑行越线。自由骑行越线指在不受其他因素影响情况下,电动自行车骑行者选择越线进入机动车道行驶的行为;受阻骑行越线指骑行者为规避其他交通参与者或障碍物等因素影响,进入机动车道寻求更好骑行环境的行为。电动自行车骑行者的期望和实际运行状态的差异,是诱发自由骑行越线行为的主要因素。在实际骑行状况和骑行者期望有较大差异时,电动车骑行者有较高概率会选择在机动车道骑行。在受阻环境下,还会受非机动车道宽度、电动车速度、相邻机动车道交通状态、非机动车道密度[27]等因素的影响。在道路环境较好时,此类越线行为可避免。
2 电动自行车越线风险建模
2.1 建模思路
电动自行车骑行者的越线行为,是为了寻求更好的驾驶环境。骑行车速、非机动车道宽度、相邻机动车道状态、非机动车道密度等都影响着电动自行车骑行者的车道选择行为。风险建模宜从直接影响越线行为的因素入手,建立基于生存分析的基本模型框架;再分析同一速度基准上,其他各单一影响因素对越线行为的定性影响;最终获取不同等级的各类道路环境因素下,电动自行车相对越线风险程度。
在影响电动自行车越线行为的主要因素中,车速为连续变量。相对于越线持续时间,车速能更直接体现越线风险,即电动自行车车速越高,越线风险越大。对电动自行车越线风险建模时,宜选用越线速度为自变量,建立生存分析基本模型,明确越线速度和行为的关系。在同一速度基准上,应用Kaplan-Meier(K-M)模型,分析各单一因素下越线速度特征,明确其他单一因素对越线行为影响。并结合实测数据,应用COX模型可获取特定道路环境因素等级下,电动自行车相对越线风险程度。
电动自行车行驶速度在越线风险分析时,对应越线行为和非越线行为二分状态。在生存分析建模过程中,可将电动自行车从发生越线行为到返回非机动车道时间内的持续速度,抽象为生存分析模型中的生存时间,建立生存分析基本模型,获取车速同越线风险的关系。
K-M模型是定量分析某一影响因素下,事件分布特性的非参数方法,可在生存分析基本模型基础上,对生存曲线差异做显著性检验。选取K-M模型对影响越线行为的非机动车道宽度或相邻道路交通流状态等单一因素进行显著性分析,明确其与越线行为的关系,可获取各单一因素对越线风险的影响。
COX回归模型又称比例风险回归模型(proportional hazards model),是生存分析模型的多因素分析方法,可分析各变量对生存率的影响。为确定各影响因素下,电动自行车的相对越线风险,选用COX回归模型,分析各道路环境因素对越线行为的相对作用。
2.2 基于越线车速的生存分析基本模型
令研究范围内处于越线状态的电动自行车速度为完全数据,非越线状态的速度为删失数据,X代表电动自行车的速度为非负随机变量。当X大于某给定的速度t时,电动自行车有大概率产生越线行为。其基本生存函数可用式(1)定义,概率密度函数如式(2):

(1)
(2)
式中:F(x)为X的累积分布函数;S(t)为生存函数;f(x)为概率密度函数;t为任意给定速度;P()为越线行为发生的概率;Δt为t的瞬时增量。
基本生存函数对应的危险函数h(t),指越线速度已经持续在t的情况下,在单位速度Δt内事件结束的概率,其本质为条件生存概率,如式(3):
(3)
2.3 基于K-M模型的越线风险单因素分析

(4)

2.4 基于COX模型的相对越线风险分析
COX回归模型可通过计算各因素越线风险比值的偏似然函数最大值,获取各影响因素对越线风险影响的相对值。COX回归模型基本形式如式(5):
h(t,Z)=h0(t)exp(βZ)
(5)
式中:Z=[Z1j(t),Z2j(t),…,Zpj(t),…,ZNj(t)](p=1,2,…,N,j=1,2,…,J)为与x相关的协变量构成的向量,即影响生存率的因素;h0(t)为基准风险函数,指全部协变量都为零,即没有其他影响因素作用下,越线行为所固有的危险函数;β=[β1,β2,…βj,…,βJ]为变量参数,通过估计βj的值可获取某影响因素对越线作用形式:当βj>0时,表明该协变量Zj为危险因子,会增加电动自行车越线率,反之则会降低越线率,当βj=0时,该变量对越线行为无影响。
当存在两个有Z和Z′个体的协变量时,可应用COX模型对其相对风险时进行分析,如式(6)。若式(6)所得值大于1,说明相比Z′的影响,电动自行车在协变量x的影响下更容易发生越线行为。
(6)
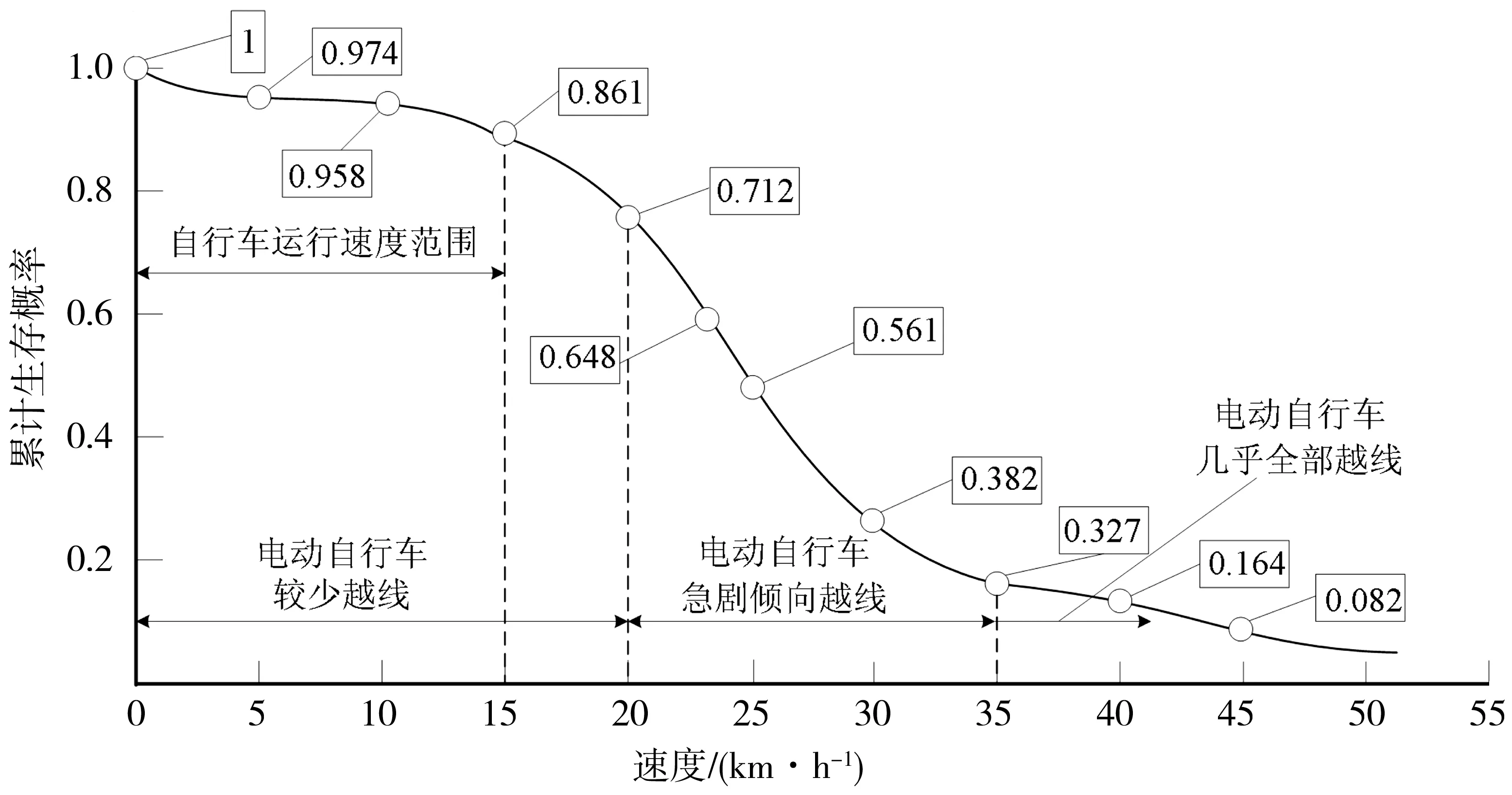
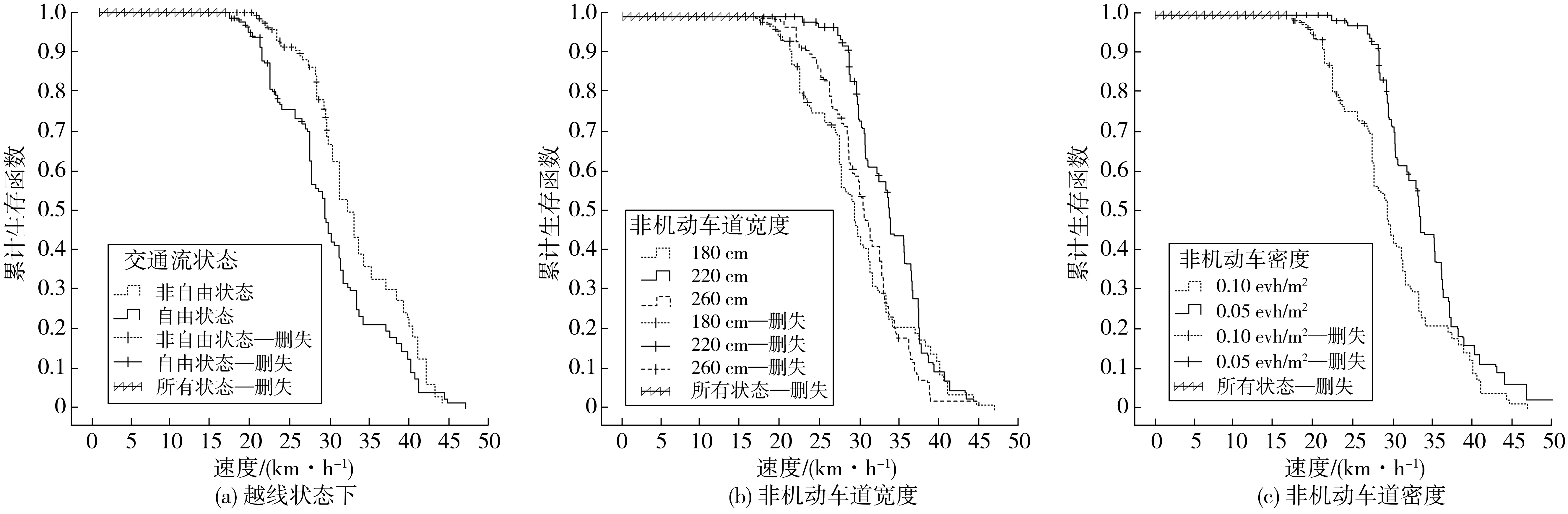
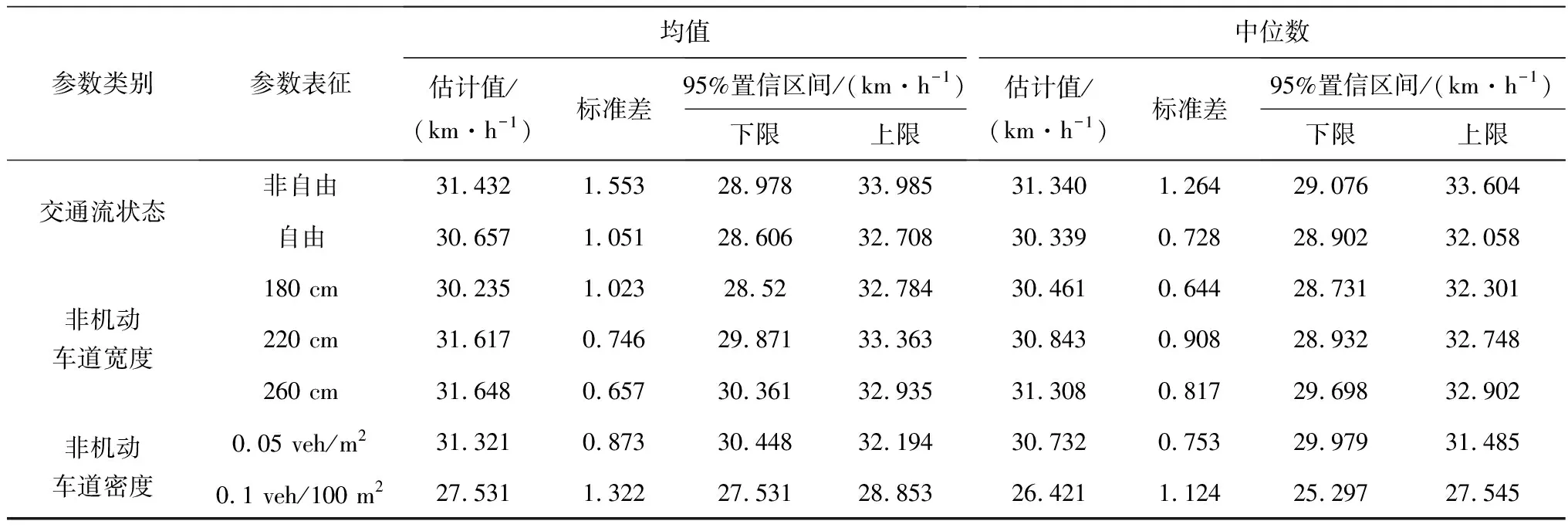
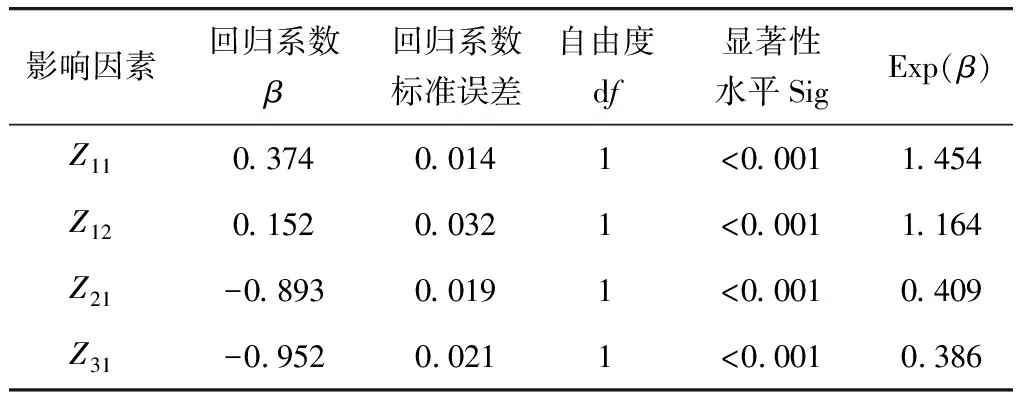
在容量为n的样本中,m个目标车辆发生换道行为时的速度为非删失数据,从小到大排列后依次为t1 (7) 对式(7)两边取对数,令LL(β)=ln[L(β)],可得到其对数偏似然函数,如式(8): (8) (h=1, 2, …) (9) 式中:sqh为sq=[sq1,sq2, …,sqh, …]的第h个元素。 选取西安市若干典型机非标线分隔路段,调查电动自行车行驶位置及对应越线车速。调查路段需具备下述特征:① 电动自行车交通量大、机非标线分隔、路面平直、路内和路侧均无大型障碍物;② 观测路段及上下游无交通设施,距离公交站点及交叉口等100 m以上;③ 观测范围应大于50 m;④ 观测天气晴好无风;⑤ 选取城市典型道路断面。据此选取西安市南二环辅道、长安南路、长乐中路等3个道路断面,其非机动车道宽度分别为260、220和180 cm。其中,260 cm为2车道非机动车道的推荐断面宽度,220 cm的道路断面在西安市最常见,180 cm的道路断面为较宽的单车道非机动车道断面。 2017年10月16—22日的高峰时段,在上述道路沿线的过街天桥设置高精度视频摄像机,获取电动自行车的自然骑行行为视频。监控视频帧率为25 fps,即测量精度为0.04 s。应用SIMI Motion软件标定观测范围内各电动自行车的位移、车速、车头时距等。在统计电动自行车越线行驶行为时,只要在研究范围内,出现越过标线进入机动车道行为,无论其是否重新回到非机动车道,均认为发生越线行驶。当电动自行车因机动车道拥挤无法越线及机动车,或行人进入非机动车道对电动自行车行驶造成影响时数据不采用。 调查共获取样本12 723个,其中有效数据6 204个,发生越线行为的电动自行车2 662辆。发生越线行为车辆中,216辆为自由骑行越线,其余为受阻骑行越线。所有样本中,91.70%的受阻越线行为同时存在多种诱发因素,因此需判析常见受阻越线行为诱发因素的重要程度,以有针对性的优化设施设计方案及交通管理措施。 汇总所调查各断面道路电动自行车越线率如表1。分析各电动车越线行为诱发因素发现,越线主要诱因为:非机动车道行驶条件无法达到行驶预期、机动车道行驶条件优于非机动车道和非机动车道宽度过窄。在2 446例受阻越线行为中,97.55%样本车速超过道路限速,62.53%样本所行驶的非机动车道较窄,89.49%样本在非机动车道行驶受阻,75.34%样本中机动车道行驶条件更好。 选取非机动车道宽度(Z1)和相邻机动车道交通流状态(Z2)和非机动车密度(Z3)作为影响电动自行车越线行为的潜在影响变量。调查所涉及的非机动车道宽度包括180、220和260 cm。对非机动车道密度研究发现0.05和0.1 veh/m2可作为畅通无阻、骑行受阻及严重受阻的分界点[28]。因电动自行车进入机动车道可接受的安全间隙不少于20 s[29],定义邻近机动车道的机动车车头时距大于20 s时为自由越线状态,否则为非自由状态。由此可建立面向车速特性的生存分析模型,研究各诱发因素对越线行为的影响程度。 由式(1)计算得到全部调查数据的生存函数曲线如图1,可反映电动自行车在非机动车道上骑行的累积概率(生存概率)同速度的关系。随着速度增加,累积生存概率不断减少,说明电动自行车随着车速提高,越容易越线进入机动车道。但生存函数的降低情况也随速度变化而有所差异:在0~20 km/h的范围内,生存函数下降的速度平缓,累积生存概率下降到0.712;20~35 km/h范围内生存函数下降极快,多数车辆在此速度区间产生越线行为;67.3%的车辆越线时车速可达到35 km/h;35~45 km/h为生存函数波动下降期,极少车辆越线的速度会达到40~45 km/h,达到此速度的电动自行车几乎均已越线行驶。 图1 车辆越线过程的生存函数 应用K-M模型可对比分析非机动车道宽度、相邻机动车道交通流状态和非机动车密度对电动自行车越线行为的影响。应用式(4)分别计算3个因素各取值区间时,电动自行车越线行为持续速度的累计生存函数,如图2(a)~(c)。图2(a)为相邻机动车道交通状态作用下的累计生存函数。由图2(a)可知,当电动自行车速度小于20 km/h时,两类交通流影响下的累积生存率均接近于1,说明交通流状态对车速小于20 km/h的电动自行车影响不大,均不易发生越线行为。当电动自行车的速度为20~35 km/h时,两种交通状态下的生存曲线均急剧下降,但自由越线状态的累积生存概率比非自由状态少11.2%,即自由越线状况的越线概率比非自由状态高11.2%。在车速达到35~45 km/h时,基本所有电动自行车均已越线,生存曲线较为平缓,两种交通流状态差距不大。图2(b)显示了不同非机动车道宽度的影响。其表明宽的非机动车道可降低电动自行车的越线概率。180及220 cm宽的道路在速度为20 km/h时,生存曲线开始显著下降,而260 cm的断面则要到25 km/h显著下降;在整个速度区间内,260 cm宽道路的生存概率基本比其他两条道路高,说明不同非机动车道产生越线行为的车辆速度有一定差异。180 cm宽道路断面的生存函数下降程度一直最大,说明窄的非机动车道更易诱发越线事件。图2(c)显示了不同非机动车道密度下的影响。密度为0.1 veh/m2的非机动车道上在速度为20 km/h时,生存函数开始显著下降;密度为0.05 veh/m2的非机动车道上在速度为25 km/h时,生存函数开始显著下降,但相比低密度环境生存概率更高,说明高密度的非机动车道更易诱发越线行为。 图2 不同条件下的累计生存函数 各状况生存曲线的均值、中位数值等指标如表2。结果显示在非自由状态下,越线速度平均值比自由状态高2.46%,中位数高于3.22%。即使在较低速度,自由状态下的电动自行车也较易越线。260 cm的非机动车道宽度下,越线速度的均值较180 cm高4.36%,较220 cm高0.97%;中位数值较180 cm高2.68%,较220 cm高1.46%。对交通流状态、非机动车道宽度和非机动车密度下的越线速度进行Log-rank时序秩检验,其特征值分别为0.001、0.005和0.003,均小于0.01,表明这3个因素的取值对越线行为均存在显著性差异。 表2 各影响因素下电动自行车越线速度的均值和中位数 在确定各影响因素下的越线速度特征后,为验证非机动车道宽度、相邻机动车道交通状况及非机动车密度等因素对越线行为的相对风险,应用COX回归对多因素进行评价。分别以180 cm的非机动车道宽度(180/220为Z11,180/260为Z12)、非自由情况(Z21)和0.05 veh/m2的非机动车道密度(Z31)作为参照水平。由式(6)-(9)计算得到的参数估计结果如表(3),据此建立COX比例风险回归模型如式(10): h(t,x)=h0(t)(0.374Z11+0.152Z12-0.893Z21-0.952Z31) (10) 表3 COX回归模型参数估计值 非机动车宽度为三分类协变量,根据式(6)可知,非机动车道宽度为180 cm道路的越线风险分别为260和220 cm道路的1.454倍和1.164倍。交通流状态为二分类协变量,协变量Z21系数的估计值为-0.893,表明非自由流状态下车辆的越线风险为自由流的0.409倍。同理非机动车密度也为二分类协变量,协变量Z31系数的估计值为-0.952,表明低密度非机动车道的越线风险为高密度非机动车道的0.386倍。上述系数的回归系数标准误差分别为0.014、0.032、0.019、0.021,表明点估计量均可反映计算区间的估计量。 1)选用电动自行车越线进入机动车道行驶的速度作为自变量,构建生存模型可定量分析速度及其他各因素对越线行为的影响。模型结果可作为非机动车交通设施设计及交通管理的依据。 2)电动自行车速度在20 km/h以内时,未越线比例为71.2%,车速处于20~35 km/h的范围时,有较高越线比例,未越线比例快速下降至16.4%,为交通管控的重点范围。 3)非机动车道宽度及相邻机动车道交通状态、非机动车道密度均对电动自行车换道速度有显著性影响,但换道速度特征存在显著差异。非机动车道宽度为260和220 cm的车辆越线风险分别为180 cm道路的0.661倍和0.859倍,自由流车辆越线的风险为非自由流的2.445倍,低密度非机动车道的越线风险是高密度非机动车道的0.386倍。
3 数据实证与应用分析
3.1 试验设计
3.2 电动自行车越线行为统计特性
3.3 基于越线速度的越线行为基本生存函数
3.4 越线动机因素的分布特性
3.5 基于COX模型的相对越线风险
4 结 论
猜你喜欢
车迷(2022年3期)2022-08-01
小读者(2021年2期)2021-03-29
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
汽车观察(2018年10期)2018-11-06
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中国高新技术企业(2015年21期)2015-07-13
科技与创新(2015年10期)2015-07-07
中国高新技术企业(2015年20期)2015-06-01