
异形钢塔拼装测量方法的研究
2021-03-06 06:32韩国卿李施展
地理空间信息 2021年2期
韩国卿,桂 朋,杜 操,李施展
(1.中铁大桥局第七工程有限公司,湖北 武汉 430050)
随着人民对物质文化需求的日益增长,桥梁逐渐起到景观作用,曲面钢塔因外形美观、拼装快速而受到青睐,但曲面结构存在特征点少,特征点之间的数学关系复杂,给现场测量定位造成困难。基于此,以摄乐桥钢塔拼装测量为例,阐述了导形钢塔拼装测量方法,为相关研究提供参考。
摄乐桥钢塔具有一定代表性,其塔高113.8 m,截面分别由两段直线、倒角圆弧和半个椭圆组成,钢塔中、上塔柱的内外脊线互相平行,脊线在下塔柱顶部分别对称向外弯折,折角为176.412°,侧面投影边缘由两个不同半径的圆弧组成,如图1 所示。
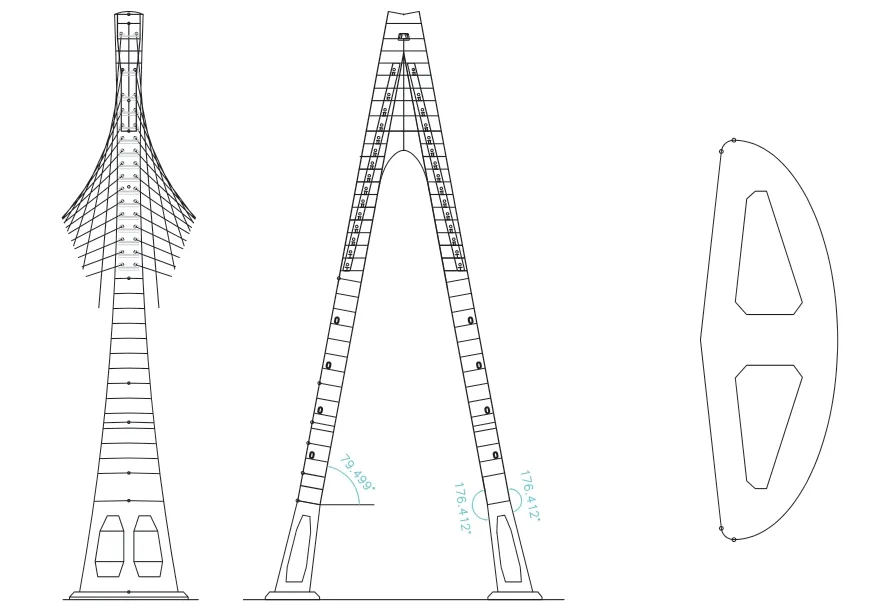
图1 摄乐桥主塔侧视图、正视图和截面图
由于钢塔截面除○点外均为平滑曲线,为了加工方便,只提供了“○”这个特征点做定位点,和○A方向作为定位方向,如图2 所示。
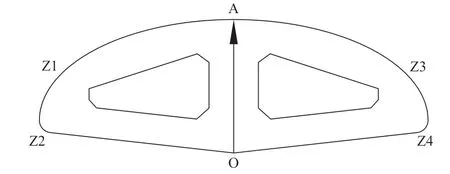
图2 摄乐桥塔柱截面图
钢塔中心距控制精度为4 mm,为保证主塔的准确拼装,本文介绍了采用一点一方向法[2]结合双边单角后方交来建立一个微型控制网,通过微型控制网来增加定位点,然后通过“复位”微型控制网来达到定位钢塔节段的目的。
1 可行性研究
1.1 设站点选择
如图2 所示,○、A、Z1、Z2、Z3、Z4 同时位于钢塔节段顶端的一个平面内,但○点和A 点之间距离与设计偏差较大,且两点之间分布有大量横隔板,采用钢尺测量,需要测量多次求和,会带来钢尺连接误差,测量精度难以保证[3]。为确定○A 距离,方案使用一点一方向法结合双边单角后方交会,配合TS30 全站仪的自动照准功能,一站完成测量,从而减少人为误差。为确保测量精度达到亚毫米级,选择距离钢塔节段30 m 范围内,测量竖直角不超过 45°的位置B 架设全站仪[4],如图3 所示。
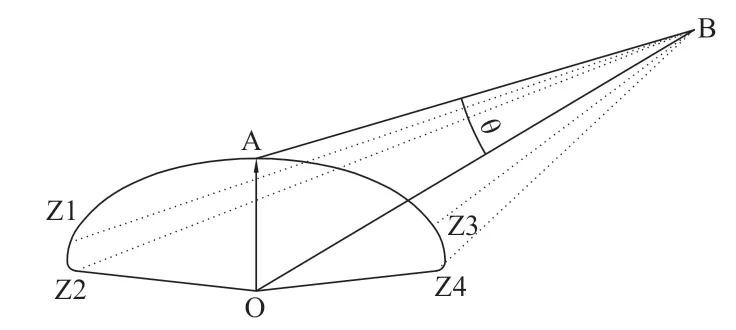
图3 微型控制网布置图
使用全站仪测得B○和BA 平距l1和l2,∠○BA的角度θ,设B 点是坐标为(x,y,h),将○点定义为原点,坐标为(0,0,0),使用水准仪将主塔截面调平后,将○A 方向设为X 方向,因A 为在X 轴上的点,坐标为(a,0,0),则a 为○A 的长度。得:

微分(1)式,经整理后得:

对(2)式应用误差传播律[5]得:

式中,ma为○A 的距离精度;m2为BA 的测距精度;m1为B ○的测距精度;mθ为∠○B A 测角精度;ρ=206 265。根据设计文件取a=4.5 m,根据TS30 的仪器参数和实验结果,考虑到现场因素,设站距离○A在30 m 以内,取m1=±0.08 mm、m2=±0.08 mm、mθ=±0.5″[6-7]。可得A 点误差等值线图,如图4 所示,由图上可以看出,设站B 点在30 m 以内时,a 点的测量误差小于1 mm。
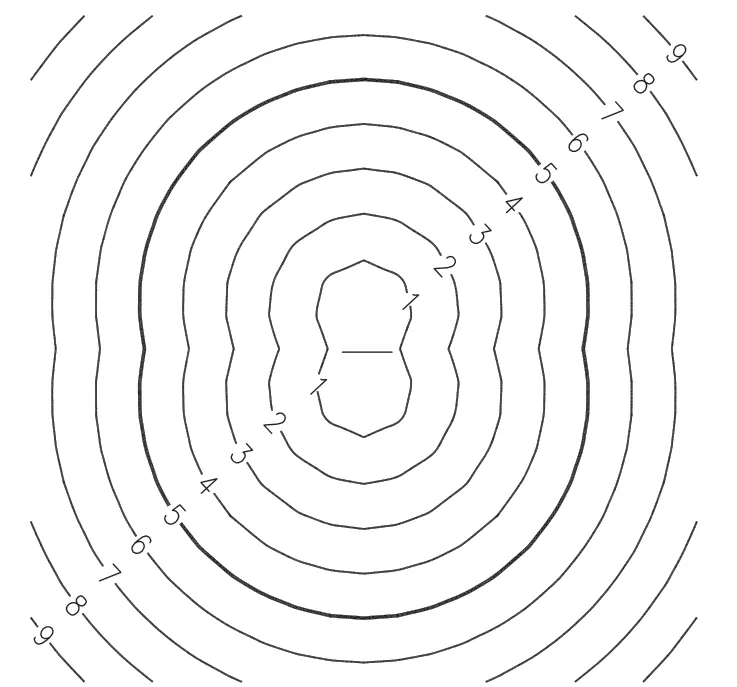
图4 A 点误差等值线图(丝米)
1.2 微型控制网建立
为了消除重复建站误差,使用全站仪由B 点直接测量待定点Z(Z1、Z2、Z3、Z4)坐标。
可求出B 点的平面坐标为(x,y):
由于a 与l1和l2并不相互独立,需要对a 展开,微分(4)、(5)式,经整理后得:
对(6)、(7)式应用误差传播律得:

mB为B 点的中误差,其中mx、my分别为B 点中误差在X 和Y 方向上的分量,
可得B 点误差等值线图(图5)。
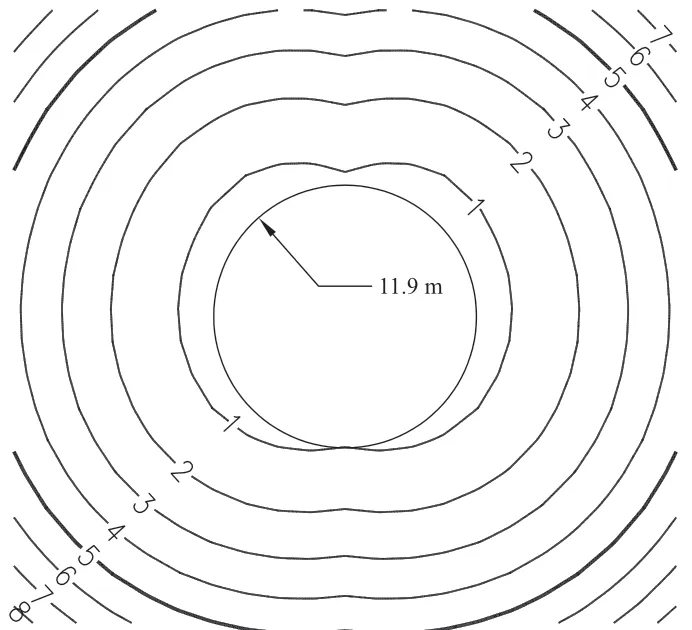
图5 B 点误差等值线图
从图上可以看出在距离○A 中心11.9 m 以内的地方建站误差均小于1 mm,且以○点位后视方向进行极坐标进行测量的情况下可以不考虑设站点和后视点误差的影响,因此只考虑极坐标法测量误差,此时测量Z 点位精度评定公式为[8]:

式中,l3为设站点至Z 点的距离;m3为L3的测量误差;mα为α 角的中误差。由此可见在距离○点10 m 范围内设站,Z 点误差约为0.1 mm。
综上所述,将TS30 架设在○点10 m 范围内,通过一点一方向法结合双边单角后方交会即可获得一个由○点、A 点和Z 点组成的亚毫米级精度的微型控制网。
1.3 “复位”微型控制网
因为钢塔节段需要以y 轴为转轴,竖向旋转一个角度β(79.5°)进行安装,此时为了获得微型控制网的设计坐标还需对其进行竖转。
将○点作为公共转化点[1],坐标不变,取坐标系内任意一点Z(xZ,yZ,hZ)坐标将变为(xZ1,yZ1,hZ1),算式如下:
这时使用以○点设计坐标为起点,○A 方向在水平面上的投影方向为里程方向的参考线进行测量。因为微型控制网位于钢塔节段上,钢塔节段到达设计位置的过程,可以看成微型控制网“复位”的过程。
此时在地面控制点用三维坐标法进行进行塔顶微型控制网点进行测量[9],测量的精度为:

MP微型控制网点的点位中误差为:

(13)(14)式中,MX、MY、MH为微型控制网点的中误差分量;S、Z、α 为斜距、天顶距、水平方向;ms、mz、mα为测距、天顶距、水平方向中误差。因控制点位于塔底,取控制点与微型控制网点最大高差120 m,固定塔顶微型控制网点,取徕卡TS30 的技术参数:ms=±(0.6 mm+1×10-6D),mz=0.5″,用(14)式做不同位置用三维坐标法测量时的误差等值线图(图6)。
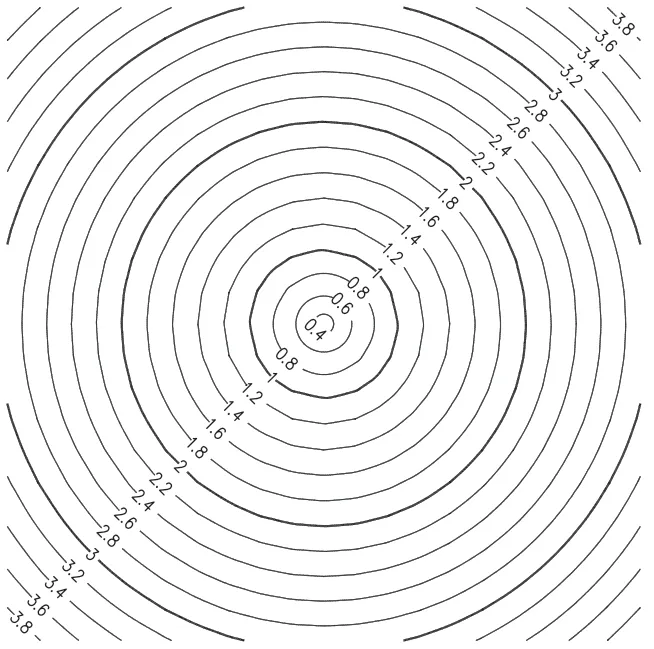
图6 控制点位置对测量塔顶坐标影响误差等值线图(mm)
当地面控制点距离主塔在637 m 以内时,测量精度在2 mm 以内,但对中误差、置镜误差、地面控制点误差、大气折光不可忽略,因此必须采取以下措施:①棱镜和全站仪必须强制对中;②主塔设站点和后视点固定;③最终定位须在较为稳定的夜间进行[10]。④地面控制点选在距主塔300 m 左右区域。
2 方案实施
2.1 场内测量
首先在钢塔拼装平台两侧7 m 处设置强制对中墩,测量前使用水准仪和楔块将钢塔节段超平,并在在钢塔节段上安装6 个吸附式小棱镜[11],在○点和A 点架立杆长10 cm 的小棱镜,在强制墩子墩上设置全站仪一站测出6 个吸附式小棱镜和○A 点坐标。然后使用CAD 将○A 点作为公共转化点将棱镜坐标转换至理论坐标[12]。
2.2 定位测量
在主塔300 m 处加密一对公路二等强制对中控制点,在钢塔临时对撑[13]处使用全站仪天顶测距法设置高程点[14],选择在第一天20:00 到第二天5:00,进行测量定位作业[15],使用极坐标法测量吸附式小棱镜平面坐标,使用差分三角高程测量其高程[16],调整钢塔节段使小棱镜到达理论位置。
2.3 竣工测量
在裸塔竣工测量[17]时,采用正倒镜双测回,精度优于定位测量,对钢塔节段特征点进行检测,45 个吊装节段全部满足设计要求,统计钢塔定位精度如下:平面平均偏差为ΔX=2.2 mm,ΔY=1.9 mm;最大偏差为ΔXmax=+4.1 mm,ΔYmax=-2.1 mm。达到预期目标。
3 结 语
通过对异形钢塔拼装测量的研究,结合摄乐桥钢塔拼装测量的结果,使用0.5″级全站仪在钢塔节段上建立一个微型控制网来实现定位点数量的扩展,即使一些点位被遮挡时仍能进行定位测量,适用于无特征点或少特征点的塔柱施工,但对于杆件一类柔性结构,存在吊装时变形的可能[18],使用时应当谨慎。
猜你喜欢
北方交通(2023年2期)2023-02-28
天水行政学院学报(2022年4期)2022-11-18
中小企业管理与科技(2022年3期)2022-04-21
特种结构(2020年4期)2020-09-06
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
成长·读写月刊(2017年5期)2017-06-11
物理实验(2015年8期)2015-02-28
电脑知识与技术(2014年34期)2015-01-06
天津建设科技(2013年5期)2013-09-04
