
基于Inventor的助行帮扶轮车的设计
2021-03-08 01:57陈恩亮李东方罗文韬黄宇杰高桢洋朱姜静
河南科技 2021年36期
陈恩亮 李东方 罗文韬 黄宇杰 高桢洋 朱姜静

摘 要:利用Autodesk Inventor软件,设计了一款结构新颖、操作简单可靠、实用性强的助行帮扶轮车。在老人独自在居家生活、锻炼等场合中,起到防摔、帮扶、助行、引导及跟随等功能。轮车主要有驱动、整车可变车架、转向及前后操作四大模块构成。通过调整可变姿态机构,可设置攀爬越障(适合进出阳台、卫生间等室内有坡度、小台阶场合)、锻炼漫步跟随、平路座行和原地转弯(转弯半径几乎为“零”)等多种模式。本轮车的研究已获国家专利授权1件、在申请1件,获得全国大学生机械设计竞赛二等奖1项、浙江省大学生机械设计竞赛二等奖1项。
关键词:帮扶轮车;可变车架;原地转弯;防摔;跟随助行
中图分类号:TH111;TH122 文献标识码:A 文章编号:1003-5168(2021)36-0028-04
Design of Walking Aid Wheel Car Based on Inventor
CHEN Enliang LI Dongfang LUO Wentao HUANG Yujie GAO Zhenyang ZHU Jiangjing
(School of Mechanical and Electrical Engineering, Quzhou College of Technology, Quzhou Zhejiang 324000)
Abstract:Using Autodesk Inventor software,we gets a wheel car with novel structure,simple and reliable operation and strong practicability.In the elderly alone in the home life,exercise and other occasions,the car plays a fall prevention,help walking,guidance and follow functions.Wheel car is mainly composed of four modules:drived,vehicle variable frame,steering and front and rear operation.By adjusting the variable posture mechanism,various working modes can be set,such as climbing obstacle(suitable for entering and leaving balcony,toilet and other indoor places with slope and small steps),exercise walking following,flat road seat and spot turning (turning radius is almost "zero").It can be switched on demand to meet the use needs of the elderly in different scenes at home.The research of this wheel car has obtained 1 national authorized patent,1 patent is in application,and wins 1 second prize of National College Students Mechanical Design Competition and 1 second prize of Zhejiang College Students Mechanical Innovation Design Competition.
Keywords:helping wheel car; variable frame; spot turn;drop resistance; following&walking aid
我國人口老龄化规模呈现迅速扩大的趋势。老年人数量巨大,大部分必定要居家养老。现阶段市场对自动化程度高、使用方便、自我依靠性强的居家养老服务助行帮扶轮车这一类产品的需求越来越高并且越来越急迫。一些厂家或科研人员在细分市场中也有一些产品面世,开展了一些研究。陈世超为解决电动轮椅折叠效果不理想的问题,设计了一款并联机构拆折电动轮椅,但是自动程度不高,不利于特定人群使用[1]。罗椅民着重论述了适应老年人功能的轮椅的设计准则和应用,但主要针对失能老人进行生活重建方面[2]。单新颖等研发了一款电动轮椅控制驱动系统[3]。但存在不同路况下加速度稳定性差的缺点。崔吉超等设计了一种可同时携带双人共乘的老人轮椅,并利用了FAE及运动仿真分析手段对结构进行了轻量化方面研究[4]。但存在车体外形较大、不便于居家使用,转弯半径较大等问题。王玉增公开了一种爬楼梯电动轮椅,具有一定的攀爬功能,但结构极为复杂,操作不便[5]。综上所述,现有轮椅或者老年人电动车,或多或少存在诸如操作不便、外形尺寸较大、转弯不灵活、加速稳定性差问题。因而,为满足老人独自在居家生活、锻炼需求,项目组提出了“助行帮扶轮车”方案,利用Autodesk Inventor软件对轮车机械结构开展了相关优化设计工作[6],开发出具备防摔、帮扶、助行、引导以及跟随等功能的轮车。
1 工作原理及性能分析
轮车工作原理如下:开机接通电源,根据实际需要,按键控制对应24 V DC、40 W电动减速机(推杆)来进行车架变换,获得所需要驾驶模式。整车姿态变换后,开启前后轮驱动模式,便可实现越障、上坡、平地行走等。据功能需要,可站着跟随一起向前“漫”步,也可直接坐在前排座椅上,对轮车控制运行。各个控制回路设计了电源开关,便于控制。
2 关键零部件或机构机械结构、电气控制优化设计
按照优化设计方案,轮车设计过程中,需要解决的主要机构和力学问题为:①整车可变车架是由电动推杆来实现变形及调节,要保证推杆伸缩过程中的刚度;②前轮转向结构,要保证转向力足够;③驱动轮根据不同地形工作行走场合,有不同的工作模式,尤其要满足越障时越障力要求;④驻车和刹车机构的设计,保证使用者的安全。除此之外,还考虑关键零部件或机构之间的连接。就上述问题,分别进行探讨和研究。
2.1 整车可变车架结构设计及推杆力学分析与选型
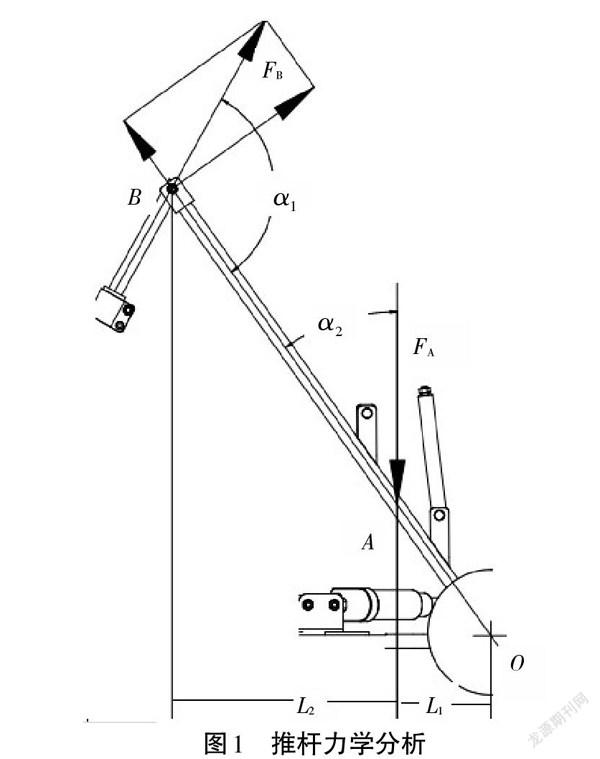
考虑到要适宜于不同地形行走需求,对车架进行“按需变形”。其中,杆AE、ED、DB及BC长度固定,而杆AB及CE长度可调。通过调节杆AB及CE长度,来实现对前后驱动轮及中间三角轮的调节,用来将整车变换出不同工作状态。如图1所示,B、O为杆BO两支点,A为负重(包括设备和人重量估取为200 kg)作用点,力记为FA。通过对点O取矩:
∑M(O):FA*L1-FB*(L1+L2)*cos(α1-90°)=0
求得最大推力FBmax为633 N。考虑推杆运行速度及刚度,最终选定推杆为行程350 mm,运行速度14 mm/s,工作电压为24 V DC,推杆实际输出力为1 kN,满足使用。同理,最终确定S150推杆为行程150 mm、运行速度14 mm/s,推杆实际输出力为1 kN,满足使用。最终优化设计了个各杆长度,完成整体车架设计。
2.2 车架转向推杆力学分析与选型及转向机构方案确定
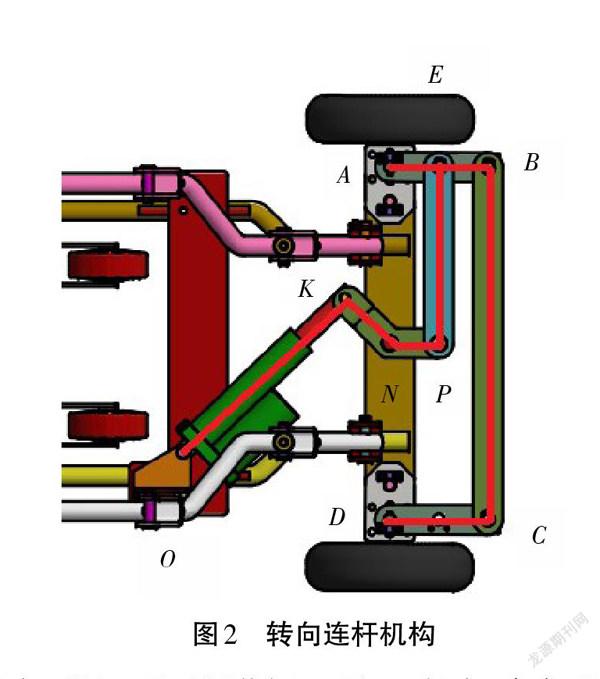
转向推杆及转向多连杆机构示意图,如图2所示。推杆通过弯头连杆K、N、P克服摩擦力做功。N为连杆旋转中心,K、P分别为推杆推力及负载力的作用点。当平行四边形机构四个杆处于一直线位置时,为了避免发生这种从动件运动不确定情况的出现,可在机构中常增加一个BC平行杆。它能够使相对杆保持平行,且两连杆的运动也始终一致。图中O点为直线电动推杆尾部固定旋转铰接点,K点为推杆连接点,N点为K、N、P连杆旋转铰点,AB和CD连杆为平行布置,BC连接AB和CD,来保证两轮同步转向。此外,同上一小节进行受力分析,最终确定推杆具体参数为行程90 mm,24 V DC,运行速度为10 mm/s,输出力为1.2 kN,满足使用。根据整车左右两侧车轮空间布置,可最终确定各连杆尺寸,分别为:[KN]=65 mm、[NP]=50 mm、[PE]=180 mm、[EA=EB]=50 mm、[BC]=380 mm以及[AB=CD]=110 mm。
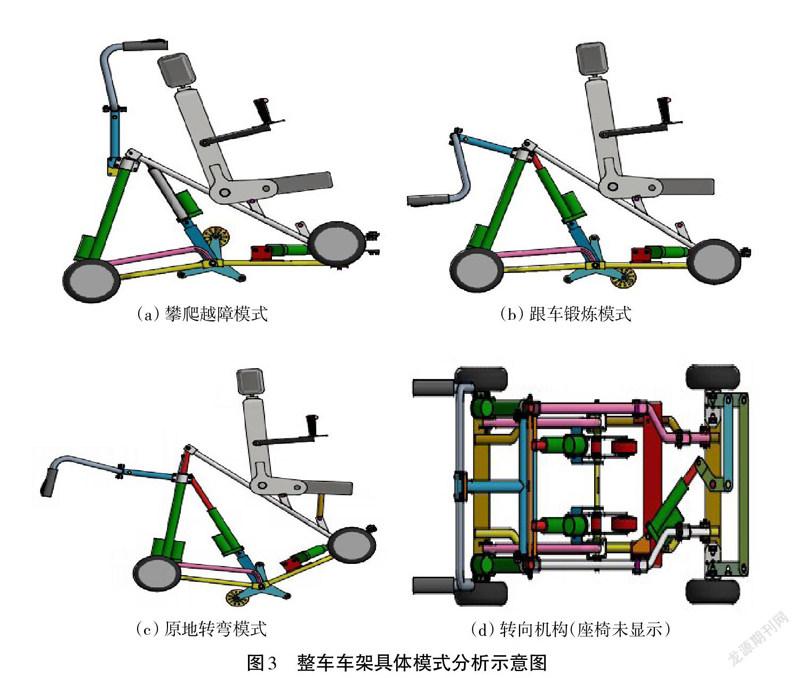
2.3 整车可变车架具体模式分析
为适应不同活动空间内运行,通过整体车架调整可设置不同工作模式,如图3所示。
2.4 车架与各驱动轮连接及后轮自动刹车和驻车结构设计
为实现各驱动轮和车架间连接,特别设计了连接块(连接两个前驱轮及转向连杆机构)和连接支架(连接两个后驱轮)。刹车具有电子刹车和手动机械刹车(驻车)功能。后轮左右对称布置,提高刹车、驻车安全性。驻车机构既能够手动,又可通过控制手柄,给出驻车信号,驱动驻车微型推杆缩回,使得驻车片紧紧靠向后轮轮缘,依靠摩擦作用,实现运行中刹车和驻车。最终,通过对整车和关键机构进行的优化设计工作,基于Autodesk Inventor设计软件,完成整车机械结构的设计,如图4所示,并完成了实物样机的试制。
2.5 电气控制优化设计
为了满足以上主要机械机构的运动以及对自动化控制的要求,须对各电动推杆运动以及霍尔控制器集成对前后轮转动进行控制设计。此外,还需要完成電源选配、控制器选型设计、总控集成、布线以及控制按钮的布置等工作。
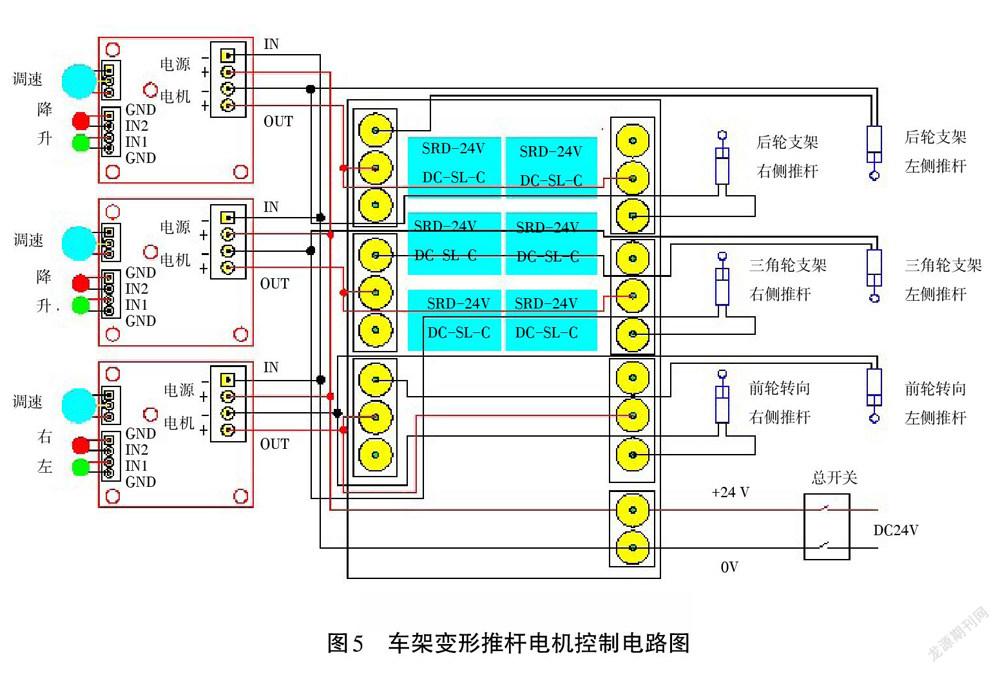
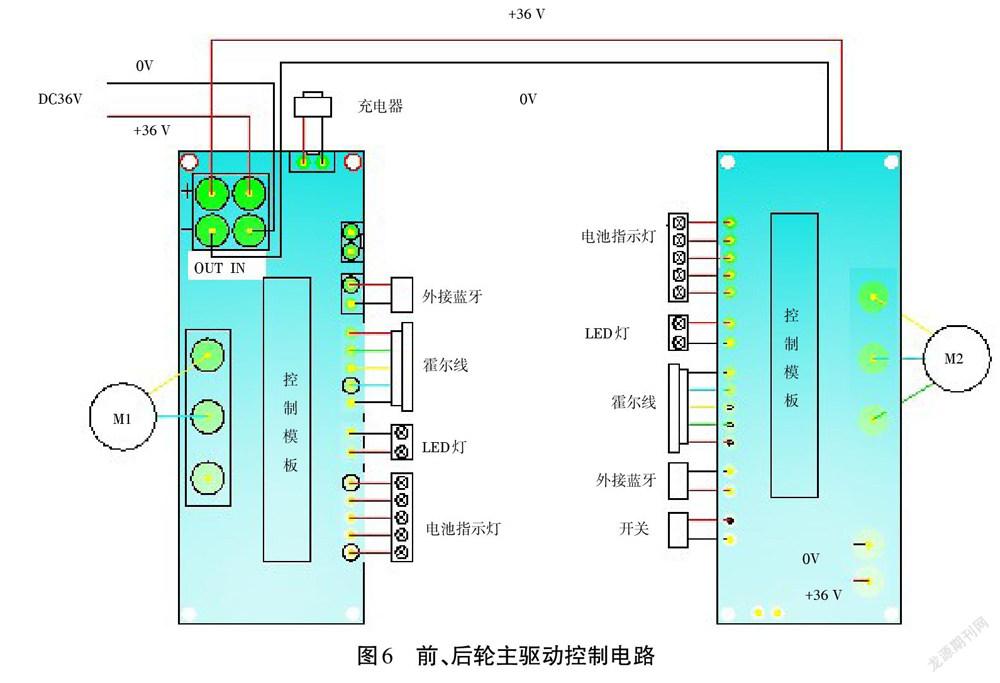
根据车架变化的运行需要,设置了各个驱动电机的控制电路,为有线控制手柄控制方式的电路图。供电电源为DC 24 V。将该电源输出到控制器输入端口。使用者通过控制电机升降的按钮实现姿态的调整。同时,设置了电源的总开关以及弱电部分的电源开关,以防止可能带来的安全隐患。每个控制器带有调节运行速度的旋钮,方便使用者选择设定运行速度。其中,控制器的详细原理图、实物图及接线图,如图5和图6所示。
3 结语
利用Autodesk Inventor软件,优化设计获得了轮车的虚拟样机,并试制了实物样机。通过机电联调实现了设计预设功能。本轮车创新点为:整车车架可“按需切换、调整”、可原地转向(转弯半径几乎为零)、带前后位操作装置、拥有自动、驻车刹车双重安防功能。总体上,轮车结构设计新颖,结构简单、紧凑、占地面积小。目前,研究成果已申报国家授权专利2件(ZL201920890884.0(已授权)、CN202120574023.9(已提交申请)),已获得第九届全国大学生机械创新设计竞赛二等奖、浙江省第十六届机械设计竞赛二等奖。
参考文献:
[1] 陈世超,林光春,黄亚太,等.一种可折叠电动轮椅的设计[J].机械,2019(8):62-70.
[2] 罗椅民.智能适老功能电动轮椅与失能老人生活重建[J].标准学,2019(1):108-111.
[3] 单新颖,陈伟,闫和平.多姿态电动轮椅控制器的设计和测试[J].中国康复理论与实践,2018(5):604-609.
[4] 崔吉超,闫俊霞,詹民民,等.折叠式单双人两用轮椅结构设计与分析[J].机械研究与应用,2014(4):166-167,170.
[5] 王玉增.一种爬楼梯电动轮椅:CN202011196262.1[P].2021-01-05.
[6] 张红松,康士廷,刘昌丽.Autodesk Inventor 2020中文版从入门到精通/CAX工程应用丛书[M].北京:清华大学出版社,2020.
