
基于无人机航测的区域场景快速三维建模实现
2021-03-10 19:38邓强张号
河南科技 2021年19期
关键词:三维建模
邓强 张号

摘 要:本文主要研究基于无人机航测的区域场景三维快速建模方法,利用主流数据处理软件进行无人机航测数据处理,进而得到纹理清晰逼真、满足快速三维建模要求的实景三维模型。
关键词:无人机航测;区域场景;三维建模
中图分类号:P231 文獻标识码:A 文章编号:1003-5168(2021)19-0021-03
Abstract: This paper mainly studied the rapid 3D modeling method of regional scene based on UAV aerial survey, used the mainstream data processing software to process UAV aerial survey data, and then obtained the real scene 3D model with clear and realistic texture and meeting the requirements of rapid 3D modeling.
Keywords: UAV aerial survey;regional scene;fast 3D modeling
1 研究背景
目前,三维建模与仿真技术已逐渐应用于应急管理等公共安全领域。因为应急场景受周围因素的影响较大,传统的三维建模方法难以开展,而且计算效率低,难以满足快速建模的需要[1]。无人机航测灵活性较高,短时间内可获取大量应急场景内高分辨率图像,使得快速获取应急场景内的数据成为可能,因此利用无人机航测实现区域场景快速三维建模变得极有意义[2]。
三维实景建模软件Context Capture集自动化、并行处理、多种影像兼容性、远程管理等特点于一身[3],因此本文将该软件用于图像的批量导入。为了实现对未知密闭空间内部结构的探测,吴笛等人利用移动平台搭载两路激光测距传感器采集数据,并将获得的距离数据进行融合,实现三维建模[4];宋书芳利用激光扫描测距技术,大面积采集城市建筑物的三维数据信息,实现了建筑物的三维建模[5]。本文通过研究无人机航测技术,加强影像识别能力和提高图像去噪效果,最终实现了区域场景快速三维建模。
2 快速三维建模数据要求
2.1 数据格式要求
为了便于对成果数据进行浏览与分析,快速三维建模数据成果为OSGB格式。
2.2 模型精度设计要求
2.2.1 平面精度。模型相对于最近控制点的点位中误差不大于0.30 m,模型点与邻近模型点间距中误差不大于0.30 m。
2.2.2 高程精度。模型基准面高程相对于最近控制点的点位中误差不大于0.20 m,模型高度中误差不大于0.20 m。
2.3 质量设计要求
快速三维建模数据产品的空间精度要满足技术设计精度指标的要求,模型纹理满足合理的视觉感官观察要求(距离观察点约300 m)。
2.3.1 各类主要地物地形的模型视觉效果。各种主地面地形的模型视觉效果应符合下列要求:①大型标志性建筑外形应完整表示,不宜出现明显残缺;②住宅楼外形应完整,无明显残缺,楼宇之间无粘连;③道路应完整表达,在无干扰区域不宜出现严重变形;④地貌应保证无干扰区域。
2.3.2 模型允许的缺陷。利用无人航测技术的方法构建实景三维模型,实质是依靠同名点匹配构建不规则三角网,结合空间交会的方法获取特征点位的空间位置。这种建模方法解决了三维造型的生产效率问题,它与经典手工建模的实质区别在于所有实景三维模型数据都由计算机按照程序算法构建,大量模型数据不需人工识别构建。该技术手段存在一定程度的视觉缺陷。
第一,影像分辨率影响。模型中会出现表示不完整、扭曲变形的图像;围墙、垣栅在不同地域会出现不同程度的破损、间断,过薄地物(广告牌、墙体、棚房边缘等)没有完整、连贯表示出来等情况。
第二,时间独立性影响。由于车辆移动和行人相关区域(如道路、停车场、广场等)受时间独立性的影响,因此物体在运动过程中会产生变形的情况。
第三,强反光体随机反射性影响。受强反光体(玻璃窗、玻璃墙、水面)随机反射性影响,航摄影像中纹理细节缺失会造成模型失真。
第四,摄影角度局限性影响。倾斜摄影的斜视镜头一般有38°~45°的夹角,当物体距离较近时会产生照相死角,导致影像纹理缺失,造成模型粘连失真、密集建筑群内的建筑粘连、建筑与相邻过近的树木粘连等情况,纹理显示不合理。
3 快速三维模型自动化生产流程方案
数据处理过程包括原始数据检查、数据预处理、平差处理、三维模型构建与数据格式转换等。数据处理用到的输入数据包括原始航飞影像、影像的外方位元素、相机参数、控制点数据以及测区边界等。
3.1 数据检查
对提交的航摄成果进行整体检查,检查项及内容如表1所示。
3.2 数据预处理
数据预处理包括影像索引信息文件的制作和影像匀光处理。
3.2.1 影像索引信息文件制作。在数据检查的基础上,对经纬度信息和照片文件无法逐一剔除对应的数据,同时制作影像索引信息文件。这些信息包括影像物理存储地址、初始外方位元素信息及姿态信息。在Context Capture软件中通过影像索引信息文件的导入即可实现影像的批量导入。
3.2.2 影像匀光处理。无人机航测进行快速三维建模通常使用倾斜摄影方法,拍摄的影像包括下视镜头影像和倾斜镜头影像。倾斜摄影中大气对光的折射、吸收和散射直接影响影像的色差、反差、影调和清晰度,因此在大多数情况下,倾斜影像和下视影像会存在一定色调差异。为此,需要将影像根据不同类型分别制作对应色调模板进行批量匀光处理,以保证影像纹理细节信息不丢失,无过度曝光或破坏色彩平衡现象,同时较好地实现影像一致性。
经过批处理使影像清晰、亮度统一、色彩饱和度适中,可以满足模型生产需要。
3.3 平差处理
平差处理的主要目的是实现所有影像数据的绝对定向,建立绝对位置关系,为三维建模提供绝对定向参数。首先不引入控制点数据,在外方位元素的支持下进行一次自由网平差,保证相邻图像、不同视角图像之间建立较强的连接关系,然后引入控制点数据。通过平差处理,能保证整个测区数据的绝对位置精度。对于整测区平差处理无法直接通过的,先进行分测区处理,再进行平差结果合并,并对合并结果进行一次整体平差处理。
3.4 三维模型构建与数据格式转化
经过空三加密后获取了大量高密度的点云数据,对数据进行切块分割,对分割区块内的密集点云构建不规则三角网(Triangulated Irregular Network,TIN),并生成无纹理的三维模型。
基于Context Capture强大的纹理映射算法对每个模型的三角面自动赋予纹理。因为所有影像均具有精确的位置信息,所以Context Capture可在全部候选影像中自动快速地选取最清晰的纹理贴在对应位置的城市实景三维模型面上,最后输出纹理清晰的实景三维模型。
为了适应计算机的处理能力,提高建模速度,将整个建模范围按45 m×45 m的大小分块切片,切片结果采用OSGB格式存储。为了满足后续生产数字线划图(Digital Line Graphic,DLG)的需要,将数据输出为数字正射影像图(Digital Orthophoto Map,DOM),采用TIFF格式存储。
4 试验分析
为验证本文提出的无人机航测区域场景快速三维建模实现的有效性,拟定试验平台为MATLAB R2019b,采用Context Capture系統,选择某城市的公园、大型商场及学校进行三维建模分析。
4.1 影像识别对比
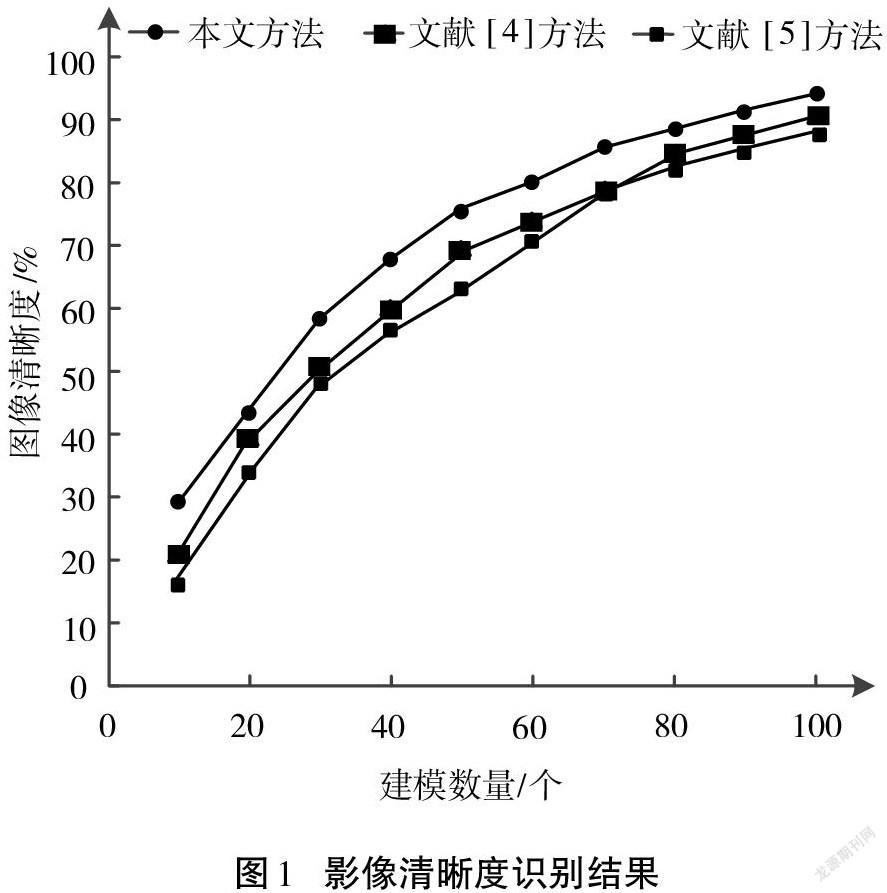
设置网速为200 Mb/s,图像运维分量为11.379,测试本文方法与文献[4]方法、文献[5]方法的影像识别能力,具体仿真结果如图1所示。
从图1可知,本文提出的方法可以准确地识别影像信息,并且图像清晰分类偏差处于相对稳定的状态,可以达到97%,由此证明无人机航测具有优越性。
4.2 峰值信噪比
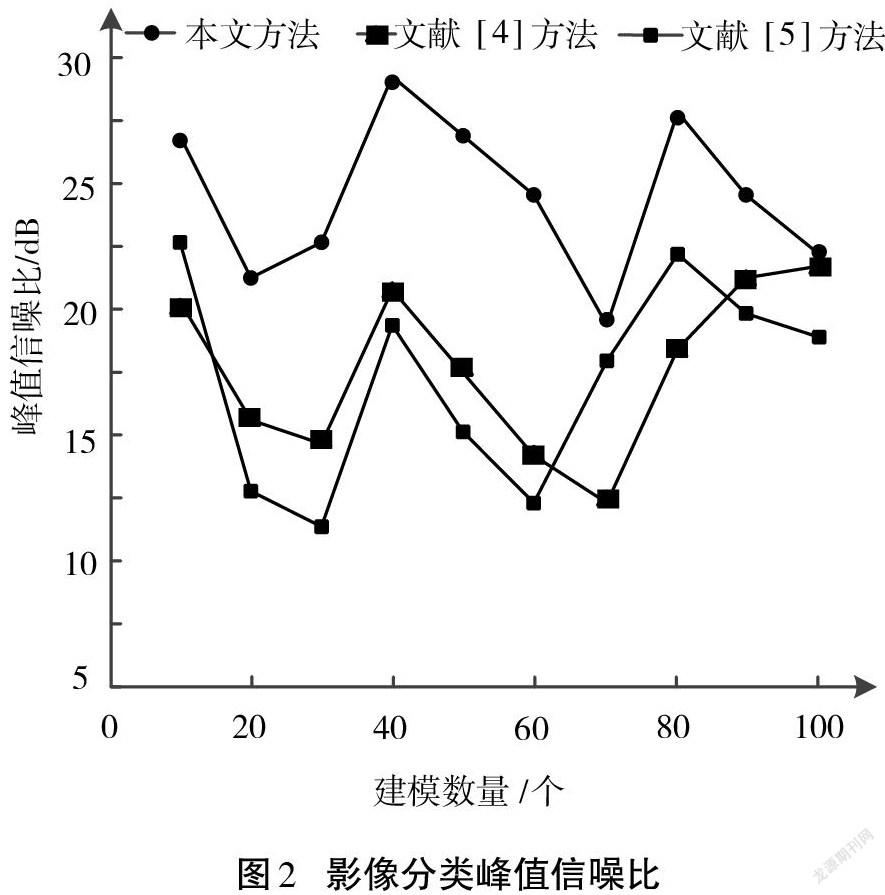
在区域场景三维建模过程中,由于各个方法的操作过程不同,导致影像数据定向效果不同,峰值信噪比有所差异。影像分类峰值信噪比的具体仿真结果如图2所示。
从图2可知,与另外两种方法相比,本文提出的方法的图像分类复杂度较低,峰值信噪比保持在25 dB以上,说明利用本文方法进行图像去噪具有突出的优势。
4.3 三维建模时间对比
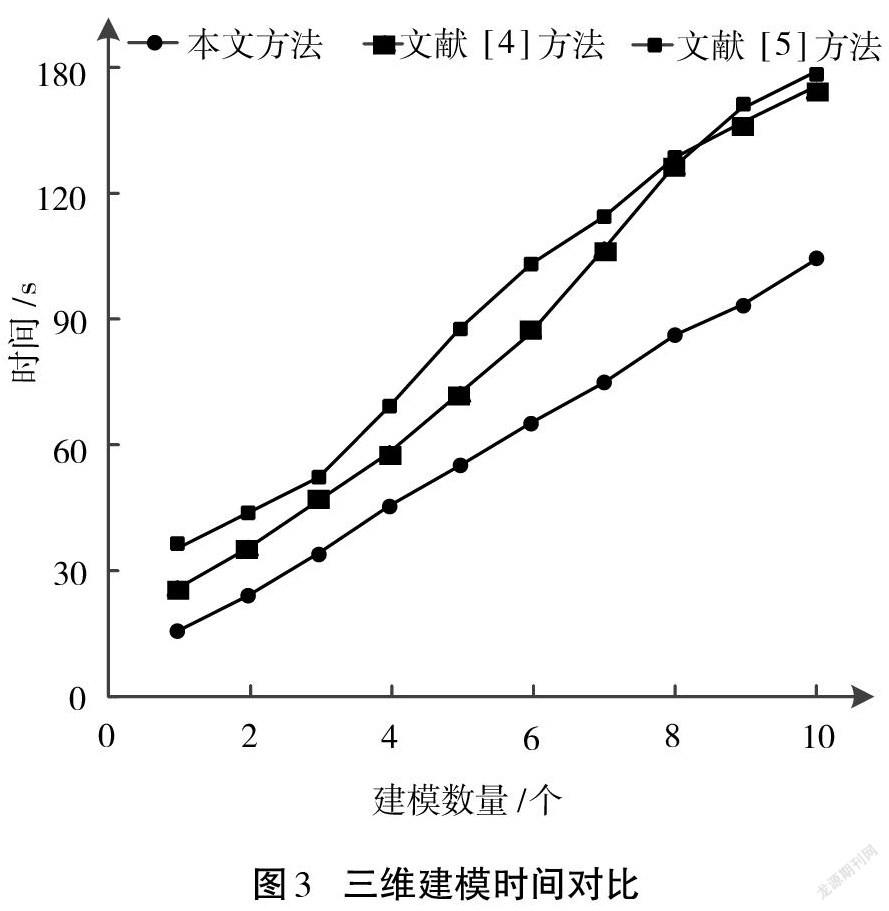
为了更加全面地验证无人机航测的区域场景三维建模的优越性,重点对比3种方法的三维建模时间,具体仿真结果如图3所示。
从图3可知,由于无人机航测利用数据平差的方式对识别影像逐层进行分解重构,因此可以有效地对区域场景影像进行去噪处理,促使无人机航测的区域场景实现快速三维建模,效率明显高于另外两种方法。
5 结语
在对区域场景三维快速建模的方法进行研究后可以发现,无人机航测技术在区域场景三维建模中具有独特的优势。工作人员可以利用无人机灵活且效率高的优势,用三镜头或五镜头以及点云等数据收集系统进行场景区域数据收集,通过软件生成三维模型。由于无人机航测所获得的数据会受到地形高低差而产生一定的形变,因此需要进一步完善和采用空中三角测量等技术,以确保区域场景的三维建模精度得到进一步提升。
参考文献:
[1]黄文锋,余振强.基于无人机航测的区域场景快速三维建模实现[J].河南科技,2017(17):24-26.
[2]傅毓.基于无人机航测的区域场景快速三维建模实现[J].科技经济导刊,2020(2):33.
[3]赵子昂.基于Context Capture的小型物件倾斜摄影3D建模的研究[J].数字技术与应用,2020(6):29-31.
[4]吴笛,倪晋平,陈丁,等.360°激光测距的可移动三维建模方法[J].测试技术学报,2019(1):14-18.
[5]宋书芳.基于机载LIDAR技术的建筑物三维模型快速构建方法探讨[J].山东工业技术,2019(2):146-147.
3478500338297
猜你喜欢
软件导刊(2016年12期)2017-01-21
东方教育(2016年21期)2017-01-17
计算技术与自动化(2016年4期)2017-01-11
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
商(2016年30期)2016-11-09
科技视界(2016年16期)2016-06-29
科技视界(2016年16期)2016-06-29
科技视界(2016年8期)2016-04-05
