ADS-B延迟转发电文检测及干扰台定位方法
2021-03-17 09:45苏志刚郝敬堂
电子与信息学报 2021年2期
苏志刚 关 静 郝敬堂 韩 冰 周 隽
(中国民航大学中欧航空工程师学院 天津 300300)
1 引言
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast, ADS-B)技术是基于明码通信链路的监视技术。采用明码通信链路必然会面临较严重的电子欺骗干扰风险,如全球卫星导航系统[1]和民航的ADS-B系统[2]。21世纪初以来,围绕如何提升ADS-B系统抗干扰能力,实现对电子欺骗干扰识别成为推进新一代空管监视体系建设亟待解决的问题。
对于ADS-B系统,电子欺骗干扰就是通过产生虚假电文使ADS-B地面站形成虚假航迹或增加真实电文延时使ADS-B地面站获得的航空器位置在时间上存在偏差,即时空偏差,从而达到干扰目的。电子欺骗干扰相对于压制式干扰[3,4]更具隐蔽性,一般电子欺骗干扰可分为自主生成式和延迟转发式两类[5–7]。对于ADS-B系统,自主生成式干扰是根据1090MHz扩展电文的最低运行性能标准[8]生成的虚假电文,使ADS-B地面站误以为虚假电文来自真实航空器。延迟转发式干扰是通过增加真实ADS-B电文的延迟,使ADS-B地面站在航空器监视上形成时空偏差。增强ADS-B数据链保密性的方法[9,10]可以增大自主生成式干扰实施的技术难度,实现对自主生成式干扰的抑制。然而,此类方法无法检测或抑制延迟转发式干扰。另外,增强ADS-B数据链的保密性通常需要对现有航空标准进行修订,这势必对现有机载设备及相关地面系统进行改造,带来巨大的更新成本,进而影响ADS-B技术在国际上的推广。采用验证ADS-B电文真实性的方法[11–14]能够同时解决自主生成式干扰和延迟转发式干扰的检测与抑制问题,但此类方法通常需要额外的系统或技术手段,例如,当利用航空器位置验证实现对ADS-B电文真实性的判识时,通常需要多点定位[13]、多源融合[14]等配合,实现成本较高。现有的ADS-B系统抗干扰研究,无论增强ADS-B数据链保密性的方法,还是验证ADS-B电文真实性的方法,均针对于电子欺骗干扰的检测或抑制,并没有涉及对干扰台的定位,不利于对干扰台的举证与取缔。
当延迟转发电文时,延迟转发电文与实时电文在时间上交织,被ADS-B地面站接收后,ADS-B地面站顺序由电文中解释出的航空器位置(为方便陈述,不妨在下文中将其称为电文位置)出现较大的波动,由此进行2次推算出的瞬时速度相对平均速度有着较大的差异。本文基于此特点,提出利用瞬时速度与平均速度差异性来检测延迟转发干扰存在与否,并结合多点定位技术,利用延迟转发电文精确的接收时间戳信息及电文位置信息实现对干扰台的定位。
2 问题描述
ADS-B系统属于非独立式协作监视系统[15],被监视的航空器由机载S模式应答机遵循文献[8]的标准产生ADS-B电文,以协作方式主动提供自身的位置、速度、事件和识别码等信息。由于ADS-B电文不包含时间信息,所以ADS-B系统按电文接收时间顺序以电文位置更新航空器位置。ADS-B延迟转发电文与实时电文在时间上交织,使ADS-B地面站顺序解译ADS-B位置电文时,获得的航空器位置信息存在较大的波动,从而影响稳定航迹的生成,如图1所示。航空器在P0, P1和 P2等处辐射的ADS-B电文被干扰台接收并延迟一段时间后再转发,使ADS-B地面站接收的这些延迟转发的电文与来自航空器在 Pk, Pk+1和 Pk+2等处辐射的实时电文在时间上交织,使ADS-B系统解译出航空器的位置更新顺序为 Pk, P0, Pk+1, P1, Pk+2, ···。航空器位置呈现剧烈变化,对ADS-B系统生成航迹造成干扰,甚至无法形成稳定航迹。
因此,ADS-B系统需要具备检测是否受到延迟转发电文干扰的能力,从而能够剔除延迟转发电文。甚至,ADS-B系统应具备利用延迟转发电文对干扰台定位的能力。
3 延迟转发电文检测方法
当延迟转发干扰存在时,ADS-B地面站解释出的航空器位置在实时电文提供的位置与延迟转发电文提供的位置间跳跃,从ADS-B地面站角度看,航空器的电文位置间隔发生较显著的变化,据此所计算出的航空器瞬时速度也将出现较大的偏差。
在较短关注期间 T内,可将航空器的飞行视为沿航线以速度 v0匀速飞行。为叙述方便,不妨将关注期间内首个电文标注为第1个电文,其后 T时间段为关注期。假设关注期内电文总数为 K,其中第k个位置电文的发射时刻、接收时刻及在空中的传播时间分别为ts,k, tr,k和 tk。若考虑电文或为延迟转发电文的可能性,将三者间关系可描述为

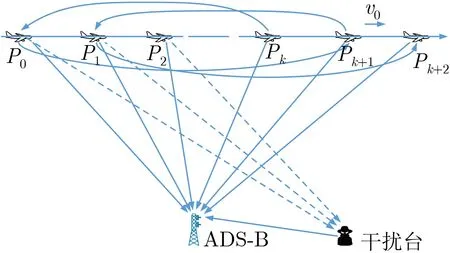
图1 延迟转发干扰对航迹更新的影响
其中, hk用 于标识电文类型的逻辑变量,hk=0表示电文为实时电文,hk=1表示电文为延迟转发电文; τ为干扰台介入所引起的转发电文相对原实时电文的延迟,该延迟是干扰台内部转发引起的延迟与电文由干扰台向ADS-B地面站传播延迟的综合效果;ξk为时间测量引入的随机误差,其服从方差为的零均值高斯分布。
ADS-B地面站接收的第m 个电文及跟随其后的第n 个电文间的航空器平均速度为

考虑两电文在空间中传播的时间差,与两电文发射时间差的关系可近似表示为

其中,θm为 航空器在第m 个电文位置时ADS-B地面站方向与航向间的夹角, c为电磁波的传播速度。综合式(1)、式(2)和式(3)可得

其中, ρ=v0cos θm/c 。因为v0≪c,所以式(4)可近似为

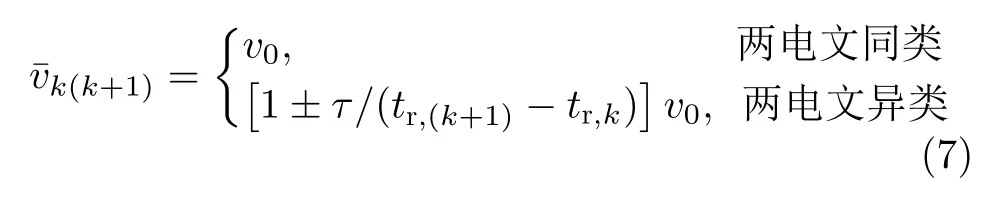
由式(5)可见,当hn=hm时,即前后两电文属于同类电文时,平均速度mn=v0;当hn≠hm时,即前后两电文属于不同类电文时,平均速度mn=[1±τ/(tr,n−tr,m)]v0,显然此时的速度mn受延迟量与前后两电文接收时间差间的比值影响。
对于关注期内的航空器平均速度

通常延迟 τ与关注时长 T大小可比拟,因此,航空器在关注期间的平均速度通常是实际速度v0的数倍关系。相邻电文间的航空器平均速度可视为航空器瞬时速度。由于延迟转发电文与实时电文间的交织,相邻电文通常属于不同类别,故
相邻电文的接收间隔 (tr,(k+1)−tr,k)≤0.5 s ≪τ,故瞬时速度|k(k+1)|≫v0。比较式(6)和式(7)可见,当不存在延迟转发电文时,航空器在关注期内的平均速度与瞬时速度相等,均等于航空器的实际速度;当存在延迟转发电文时,由于延迟转发电文与实时电文间的交织,使得相邻电文通常属于不同类别,航空器在关注期内的平均速度与瞬时速度存在显著的差异。不妨设置判决门限η,当

成立时,说明接收电文中存在延迟转发电文。式(8)中E[|(k+1)|]表示关注期内瞬时速度的平均值。分离延迟转发电文时仍可利用门限η 进行判决,若

成立,则根据两个电文的位置信息,位置处于航向后方的即为延迟转发电文。ADS-B地面站可利用提取出的延迟转发电文进一步实现对干扰台的定位。
4 延迟转发干扰台定位方法
假设已经完成对整个关注期内延迟转发电文的检测,并假设延迟转发电文数为 N。以关注期间内首个延迟转发电文的电文位置为原点建立直角坐标系x oy ,如图2所示。以航空器的航向为x 轴正方向,垂直于x 轴且远离ADS-B地面站的方向为y 轴正方向。通常干扰台距离ADS-B地面站相对较近,而且选择定位干扰台的航迹通常距离ADS-B地面站较远,因此,干扰台与ADS-B地面站常常处于航迹的同侧。设干扰台的坐标为 PJ(xJ,yJ)。航空器辐射的ADSB电文的各时间参数间关系如式(1)所示。
干扰台转发延迟 τ的引入使得电文接收时刻tr,k出现偏差,从而影响对航空器的位置更新。为消除转发延迟 τ的影响,将关注期内的延迟转发电文均相对首个延迟转发电文进行差分处理

两差分电文的传播路径差

其中, tr,k1=tr,k−tr,1为两电文的接收时间间隔;εk=c(ξk−ξ1)为 距离误差项;航空器速度v0若未知,可利用首末电文信息由式(5)估计出。
根据第 k个电文位置Pk(xk,0)可以将其与干扰台间距离表示为

联立式(11)与式(12),消除rk后整理得

其中,ηk为 误差项。
利用关注期间内全部延迟转发电文,可构建出N −1个类似于式(13)的等式。将这些等式合并为矢量形式

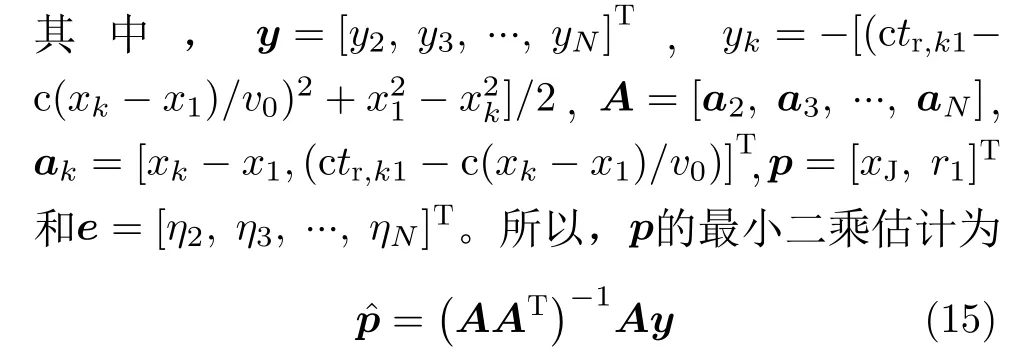

基于以上的准备,可将延迟转发干扰台的定位方法具体表述为:
步骤 1 根据式(8)判断关注期内是否存在延迟转发干扰,若式(8)成立,则说明存在延迟转发干扰。
步骤 2 当关注期内存在延迟转发干扰时,找出满足式(9)的顺序两电文,将电文位置偏向航向后方的电文视为延迟转发电文。将关注期内全部延迟转发报文分离出来。
步骤 3 以分离出的延迟转发电文中首个电文位置为原点,沿航向设置 x轴,将所有延迟转发电文位置在 x 轴的坐标表示为x1, x2, ···, xN,相应电文的接收时刻记为tr,1, tr,2, ···, tr,N。
步骤 4 根据位置参数 { x1, x2, ···, xN}、时间参数 { tr,1, tr,2, ···, tr,N}和 速度参数v0,由式(14)构建矢量方程,并由式(15)获得相应的解p ˆ=[,]T。
5 仿真分析
通过仿真实验来验证本文方法对检测延迟转发电文和定位相应干扰台的有效性。
首先,评估ADS-B地面站采用顺序电文间的航空器瞬时速度与关注期内平均速度间的差异性判断延迟转发干扰存在与否的可行性。考虑某航空器沿航线以 v =300 m/s匀速飞行。以关注期间内首个电文位置为原点,持续采集该航空器在航线飞行150 km范围内的电文。ADS-B地面站在图2所示的直角坐标系中的坐标为( 50 km, −20 km),干扰台的坐标为( 80 km, −25 km)。航空器按文献[8]的标准辐射位置电文,干扰台引入的电文延迟为10 s。假设航空器飞临( 75 km, 0 km)附近时干扰台的延迟转发电文开始介入。ADS-B电文碰撞的概率为pc=0.01。ADS-B地面站利用顺序接收30 s的电文判断ADS-B地面站是否受到延迟转发干扰的影响。
由图3可见,延迟转发干扰介入前后,关注期内的平均速度与瞬时速度均值差异显著。当延迟转发干扰介入前,关注期内的平均速度与瞬时速度均值几乎相同;当延迟转发干扰介入后,关注期内的平均速度出现波动,但波动范围相对较小,但瞬时速度均值迅速升高。在图3圈出位置,平均速度出现波动,但与后期的波动不同,只是单向波动,这是因为随着关注期的滑动,部分延迟转发干扰进入关注期,用于计算平均速度的首电文均来自实时电文,末电文来自延迟转发电文。
下面分析利用提取出的延迟转发电文及其时间戳信息对干扰台定位的性能。采用与前例相同的场景,探讨系统定时误差对干扰台定位性能的影响。定义干扰台定位的均方根误差在不同定时误差下利用200次蒙特卡罗实验结果统计干扰台的均方根误差,如图4所示。

由图4可见,在相同的航线位置,当定时误差增大时,相应干扰台定位的均方根误差也随之增大。同时,干扰台定位误差也和电文位置与干扰台的相对位置有关。当电文位置处于干扰台与航线的垂直区域(不妨称为正视区域)附近时,定位均方根误差最小。当电文位置远离正视区域时,定位均方根误差增大。
图3 延迟转发电文对速度的影响
考虑用于定位干扰台的延迟转发电文数目对干扰台定位精度的影响。采用与前例类似场景,但ADS-B地面站定时误差的标准差固定为 σt=60 ns。采用不同数量的电文,利用200次蒙特卡罗实验结果统计干扰台位置估计的均方根误差。正视区域附近的定位误差与电文数目之间的关系如图5所示。由图5可见,随着延迟转发电文数目的增加,对干扰台定位精度也逐渐提高。在使用较高电文数目进行定位时,定位精度的变化也相对比较缓慢,更适宜在较大范围内实现对干扰台的高精度定位。对比图4和图5可以发现,在航线上,航空器若远离正视区域,对干扰台的定位误差会显著升高,所以干扰台的定位误差还受到干扰台位置矢量与航向矢量间的夹角的影响。
6 结论
利用顺序电文间的瞬时速度与关注期内平均速度差异性实现对延迟转发干扰的检测,并利用分离出的延迟转发电文位置及其接收时间戳信息,采用多点定位思想实现对延迟转发干扰台的定位。仿真结果表明,利用瞬时速度与平均速度差异性可以有效地实现对延迟转发干扰存在与否的检测。利用分离出的延迟转发电文可以实现对干扰台定位,其定位精度与所利用的延迟转发电文数目、干扰台与电文位置间的距离、干扰台方位等有关。本文方法可以使ADS-B地面站不借助任何额外系统、不改变现有通信协议的基础上,独立地实现对延迟转发干扰的检测及对相应干扰台的定位。
图4 定时误差对干扰台定位精度的影响
图5 用于定位的电文数目对定位精度的影响
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
中国金属通报(2021年9期)2021-08-06
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
飞天(2019年6期)2019-07-08
自动化学报(2017年2期)2017-04-04
导航定位学报(2015年2期)2015-06-05
新高考·高二数学(2014年7期)2014-09-18