
基于激光点云精确定位的输电线路无人机自主巡检系统分析
2021-03-29 01:37李林青李宏高举牟诚德李泓廷
装备维修技术 2021年20期
李林青 李宏 高举 牟诚德 李泓廷


摘 要:根据现在社会的不断发展,电网无人机巡检的时代也在慢慢到来,新的工作方式也得到了更高得挑战。为了能够迅速地实现输电线路自主无人机巡检,减少手动飞行的操控,本文分析了基于激光点云精确定位的输电线路无人机自主巡检的系统,通过精准三维的激光点云数据来实现航线的自主生成和自主的规划,从而实现无人机全程无人化巡检作业飞行。
关键词:激光点云;输电线路巡检;无人机巡检;自主飞行
引言:
近几年,云南的电网输电线路规模也在快速地加强,这对输电线路的巡检效率与水平运维都提出了很高的要求标准。尤其是随着国内通航领域政策在逐渐开放与自主无人机技术的迅速发展,综合地进行分析了自主无人机在巡检时,路径的规划优化与线路的故障检测,本文对于自主无人机的巡检监控、应急的巡检与可靠的运输,讲述了运输保障的系统设计需求,并且还分析了自主无人机巡检的应用策略。
1.激光雷达的巡检
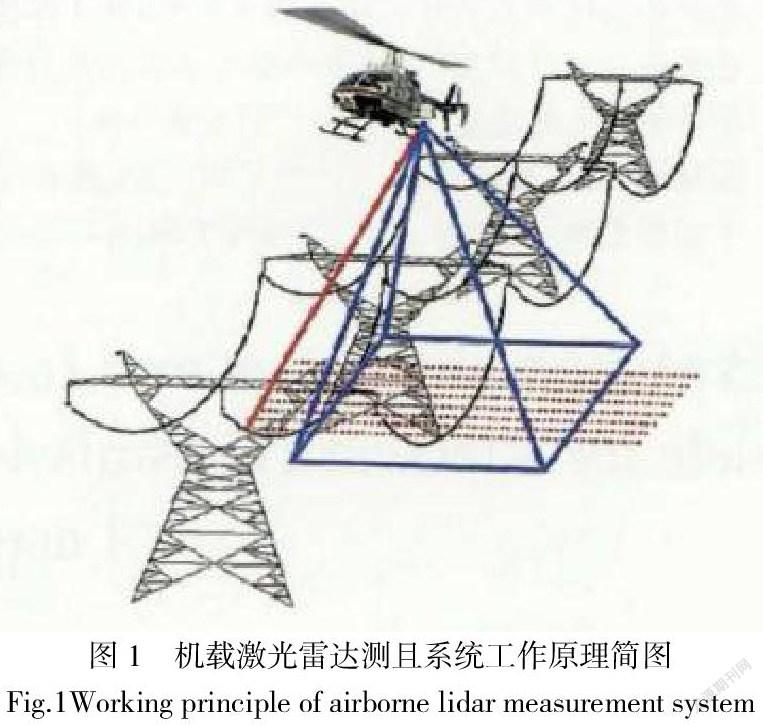
激光雷达的工作原理就是应用激光测距从而来获取激光的发射器和地面点间的斜距,而且还需要按照同步搭载的CPS与惯性的测量单元来进行数据的激光点云中的定向与定位,这样就可以恢复激光点云三维的坐标空间,还可以让系统有穿透性、非接触性、高密度、自主性及高精度等一些特点。如图1 所示,在自主无人机的搭载激光雷达的系统是在输电线路上空中一侧的飞行,从而来得到电力线在走廊里面摄像的数据、红、紫外线的数据、影像的数据和激光的数据等一些环境的变量参数,在经过后期的结算处理分析,可以得到电力线走廊台账的数据,还包含着断面图、弧垂、跨度以及路刨面图等这些个数据的特征。而且还需要对路线的走廊来进行矢量化的管理分类,来建立出走廊线路的三维模型。若是要建立一个三维的航迹规划,那么就需要基于航迹的激光点云的控制目标及跟踪的算法,还要确保自主无人机航迹的优化性与目标跟踪的可靠性质。
2.激光点云的智能数据的分析
2.1基本的激光点云的数据管理
目前,按照文中图2 的激光点云雷达的数据展示。通过使用无人机搭载三维激光设备收集激光点云数据,再进行数据解算处理形成三维激光模型,结合实际物体进行激光点云分类从而实现电力线路中的三维数字化,也会根据《DLT741-2019架空的输电线路的运行规程》来把线路简单地进行个分类,如,导线、地线、杆线、通道、河流、树木及铁路等一些输电线路。一般在通道之内,经常会见到的就是地物类型,能够恢复电力线的沿线地表附着物与地表的形态,还可以满足每一个电压等级的输电线路来进行每一种不同地物的运行安全的距离要求[1]。
图3是为了测量出激光点云的空间。可以使用点云测量工具或者专用软件分析处理,进行危险点检测,和通道的树障等一些交叉的跨越物,从而得到缺陷隐患的自主分析及自动地测量、自动生成报告。
2.2逐渐降纬的简化方式的重构电力线
现在的自主无人机在激光雷达下对输电线路巡检的过程中,它会受到地貌与地形等一些环境的因素影响,有的时候得到的输电导线的激光点云数据的密度很低,且激光点云的分布空间的间距也是比较大的,有时也会发生导线断裂的状况,这样就要对导线进入快速的修复,之后在进行恢复本来就有的空间分布。通过系统采取一些简单的曲线空间的拟合办法,运用这种逐渐地降纬的方法来进行实现三维曲线空间的拟合。通过几点内容来分析。一是,面对激光点云数据的影响计算的效率,需要把重复数据逐个过滤;二是,按照导线进行水平面上的分布是呈直线的特点来拟合,这是需要二维平面直线的拟合,从而达到第一次的降纬;三是,依据导线在垂直的水平面上所呈现的是抛物线的特点分布,让二维曲线进行拟合,这样就可以实现第二次的降纬了;四是,想要完整的三维空间拟合,就一定要的得到导线整体的三维空间的分布。在进行第一次的降纬时,就是为了X-Y的平面直线相拟合,那么在进行第二次的降纬时,则是为了可以让X-Z的平面曲线相拟合,在这之后就可以完成三维空间的整体拟合了。在每次的计算当中,维度在降低时它的计算效率也会得到很大的提高,从而实现导线的随时拟合,随时恢复。
2.3导线、杆塔的自动分类
在面对输电线路的导线档之间走廊上自身的复杂性质,目前的办法就是针对杆塔或者是导线其中的一种数据来进行分类,这样就使得数据的分类工作变得非常得复杂繁琐,但是通过系统的方式获取基于导线与杆塔空间的拓扑关系,来进行Houghton应用的变换和Kmeans聚类的办法,这样就能够实现杆塔与导线的快速分类。
2.4激光点云纠偏的坐标方法
通常情况下三维激光雷达获取的点云是相对坐标的点云,若想要应用到高精度自主巡检中,则必须获取三维激光点云的绝对坐标,获取绝对坐标的方法有很多种,本文介绍其中两种方法,一是通过使用某厂家的云迹服务,对点云进行实时纠偏,二是手动进行坐标纠偏,即在扫描三维激光数据时,通过记录架设基站的绝对坐标位置来实现手动纠偏功能,首先使用水准基座进行找平,将基站假设在水准基座上获取仪高,再使用高精度仪器获取中点上的经纬度坐标,这样即可获得该基站的绝对坐标值,记录好绝对坐标后,将其带入某特定软件中进行点云数据的纠偏。
3.激光点云的航线规划与自主飞行
3.1航线的自主规划
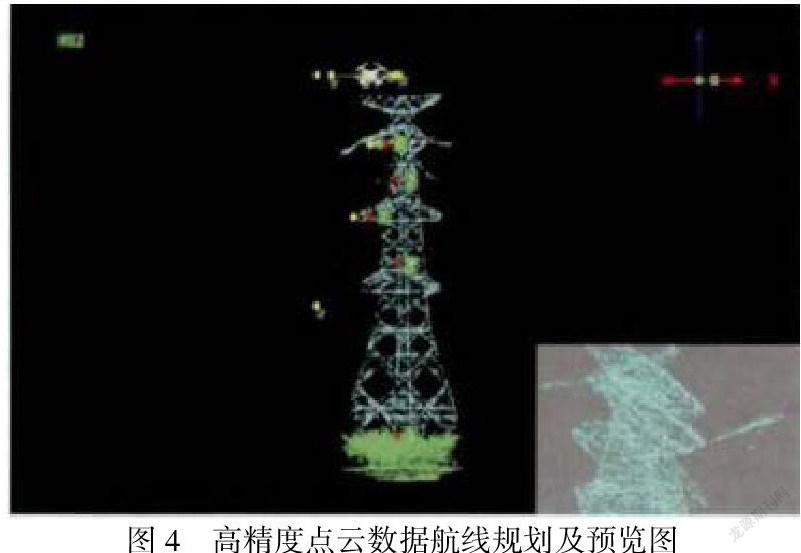
目前文中的图4是高精度的激光点云数据的航线规划与预览图。它是依据高精度的激光点云杆塔模型的数据,进行航迹规划,对每一个需要拍照的点进行确认,通过每个拍照点进行连接,从而获取一条高精度航线,实现杆塔自身本体的精细化巡检和自动化拍照,它还有连续输电线路多基杆塔的航线飞行设定,也可以随时推出自动巡检航线,这是为了无人机的断电续航提供了安全可靠的保障;在规划好航线后,对需要拍照的点进行危险点分析,设定好安全距离,这样就可以让无人机避开杆塔,从而降低无人机故障的风险保证安全飞行[2]。
依据不同的地形及塔形来进行参数的航线设置。以某公司无人机经纬M210RTK的系列搭载出Z30的镜头为案例,进行航线规划过程中最初始化的参数设置,从而为得到相应预览图,为工作人员提供参考。
3.2无人机自主飞行
通过将航线上传至无人机非空系统中,使无人机按照已经规划规划好的航线,来进行任务飞行。无人机在全自主飞行当中,会自动根据航线进行飞行,在出现紧急状况之前,可以有一键返航的功能,或切换至手动操作,这样就可以保证无人机在全程无人化的时候,能够顺利地完成自主飞行巡检的飞行作业[3]。无人机自主巡检充分地展示了無人机在输电线路精细化巡检的全面覆盖,在拍摄目标要求的方面,就是“可见即可得”的成果,也为了今后的输电线路的自主无人机的巡检能够提供出探索的新发展方向。基于激光点云高精确定位的输电线路无人机自主巡检的系统在未来的发展过程中,将有效提高作业人员的工作效率,降低作业人员对无人机使用的操作要求,保证作业人员及时获取电网风险信息,从而使电网的安全风险得到极大的降低。
结语:
总而言之,文中提出了基于激光点云准确定位的无人机自主巡检的系统分析方案,这种分析一般基于高精度的三维激光点云的数据来进行航线的自主生成与自主的规划,这样就可以实现无人机全自主作业飞行,在无人机进行自主的巡检飞行的时候,通过自动壁障的功能及空间碰撞检测,可以降低无人机自主巡检时发生碰撞的概率,通过手动切换无人机操作模式,使无人机断电续航提供安全保障。
参考文献
[1]汤明文,戴礼豪,林朝辉,等.无人机在电力线路巡视中数据的分析[J].中国电力,2020,46(3):35-38.
[2]黄俊璞,林韩,宋福根,等.输电线路上方无人机巡检避障策略[J].电气应用,2019,34(23):32-34.
[3]康乐.无人机三维航迹规划的方法研究[J].计算机工程与应用,2019 , 45 ( 33):236-239.
