
基于线性调频Z变换成像声纳算法研究
2021-04-20 02:23黄赓张靓
电子技术与软件工程 2021年2期
黄赓 张靓
(海装沈阳局驻大连地区第一军事代表室 辽宁省大连市 116600)
近年来随着水下成像技术的发展,水下三维成像技术已成为对水下目标进行探测、识别的主要技术手段。
三维成像声纳作为一种水下实时成像设备,主要利用单频窄带声脉冲信号照射整个探测区域,利用平面阵接收回波声信号,信号处理模块利用波束形成算法实时计算不同方向的回波信号。回波信号的强弱反映了在该方向上声波的反射能力,通过选取对应的波束信号强度,获得水下目标的三维图像。在每次成像过程中需同时计算上万个波束,这将导致运算量迅速增加,无法满足成像实时性需求,为降低算法运算量,提升计算效率,本文中采用一种基于线性调频Z 变换(CZT)方法对算法进行优化,经仿真分析可知,本文的方法可有效提升计算效率。
1 基于线性调频Z变换波束形成
1.1 一级子阵波束形成
在三维成像声纳算法中,为减少波束形成所需的计算量,通常将平面阵根据不同阵型划分成多个子阵,对于阵元数为N×N 个阵元组成的平面阵通常分成两级子阵,每个一级子阵包含Na×Na个阵元,每个二级子阵包含Nb×Nb个阵元,N=NaNb,子阵划分示意图如图1所示。
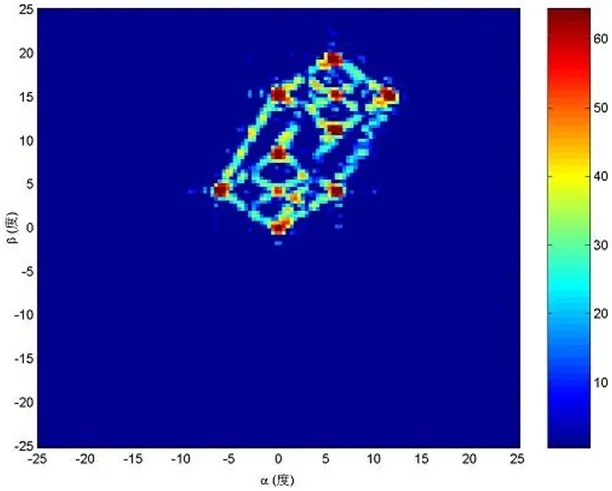
由于一级子阵阵元数Na< wm,n为加权系数矩阵,Sm,n(k)为回波信号经离散傅里叶变换(DFT)后所得矩阵。 远场条件下,频域波束形成中相移因子与傅里叶变换的变换因子有相同的表达式,因此一级子阵波束形成可利用离散傅里叶变换(DFT)完成,通过采用快速傅里叶变换(FFT)可有效减少一级子阵波束形成计算量,由于离散傅里叶变换(DFT)用于的计算范围为单位圆,三维成像声纳成像角度范围可视为在单位圆上某一段圆弧,线性调频Z 变换(CZT)可作为在单位圆任一段圆弧上的离散傅里叶变换(DFT),因此,可利用线性调频Z 变换(CZT)对一级子阵进行波束形成,表达式如(4)式所示: 利用FFT 快速算法可求得一级子阵的Qa×Qa个波束,完成波束形成后,一级子阵从阵元域转换为波束域,并作为二级子阵基本单元,参与二级子阵波束形成过程。 二级子阵作为平面接收阵虚拟阵元,共包含Na×Na个阵元,阵元间距为Nad,在P×Q 个方向进行波束形成,假设波束信号方向为首先从每个一级子阵预成的波束中抽取与该信号方向距离最近的一个波束。在每个预成的波束方向都需要从所有一级子阵共抽取Nb×Nb个波束,波束抽取过程可分解成水平波束抽取与垂直波束抽取两部分: 1.2.1 水平波束抽取 根据二级子阵预成波束方向,在一级子阵的Na个波束中抽取与该波束方向最近的一个波束平面,波束抽取示意图如图2所示。 其中,一级子阵波束平面用黑色细线表示,二级子阵波束平面用红色粗线表示,以左侧第一个波束平面作为参考平面,二级子阵波束水平标号用Pb表示,与参考平面夹角为β,目标波束平面号用x 表示,与参考平面夹角为α,波束抽取过程指当β 等于α 时求得关于x 的值,表达式如下所示: 目标波束平面水平标号x 表达式可表示为: 1.2.2 垂直波束抽取 垂直波束抽取过程与水平波束抽取相似,目标波束号y 表达式如(7)式所示: 一级子阵预成波束经波束抽取后,在全阵面形成所需的全部波束。 本节通过对线性调频Z 变换(CZT)波束形成、频域(DM)波束形成、分级子阵(DPS)波束形成三种算法进行比较,讨论三种算法计算效率。 线性调频Z 变换(CZT)波束形成所需计算量包括一级子阵波束形成与二级子阵波束形成所需的计算量。 一级子阵采用线性调频Z 变换,利用FFT 实现快速计算,采用FFT 实现卷积需要两次FFT 运算,一次IFFT 运算[2],因此每个一级子阵波束形成需要次实数计算,二级子阵波束形成所需计算量为: 因此线性调频Z 变换(CZT)波束形成所需计算量表示为[3]: 频域波束形成(DM)计算每个波束需要N2次复数乘法与N2-1次复数加法,在频域波束形成算法中,首先需对每个阵元进行L 点离散傅里叶变换(DFT),所需计算量表示为: 全阵列Q2个波束所需计算量为: 分级子阵波束形成(DPS)所需计算量主要来自一级子阵与二级子阵波束形成,一级子阵所需计算量为: 二级子阵所需计算量为: 所以分级子阵波束形成算法计算量为: 假设平面阵阵元数为N=48,预成波束数为Q=128,一级子阵阵元数N1=6,预成波束数Q1=16,二级子阵阵元数N2=8,取L=24点数据进行离散傅里叶变换(DFT),图3展示了三种波束形成算法计算量对比图。 由图3可知,随着波束数的增加,三种波束形成算法计算量均有增加,相较于频域(DM)波束形成,分级子阵(DPS)波束形成算法与线性调频Z 变换(CZT)波束形成算法所需计算量大幅减少,其中线性调频Z 变换(CZT)波束形成所需计算量最少。 线性调频Z 变换(CZT)波束形成算法由于在一级子阵中利用快速傅里叶变换(FFT),只需要存储二级子阵相移参数,因此线性调频Z 变换(CZT)波束形成算法所需存储量表示为: 频域(DM)波束形成中的相移参数被预先存储在存储模块[4],假设平面阵包含N2个阵元,预成Q2个波束,频域波束形成所需相移参数表示为: 分级子阵波束形成(DPS)算法,由于全阵列水平方向与垂直方向上所有行和列的相位参数完全相同,仅需要存储一行与一列阵元的相位参数,假设一级子阵阵元数为N2a,波束方向数为N2a,二级子阵阵元数N2b,波束方向数N2b,分级子阵波束形成(DPS)算法存储量表示为: 上述三种不同算法所需存储量对比如图4所示。 根据图4可知,三种波束形成算法所需存储量均随着波束数有所增加,三种算法中,基于线性调频Z 变换波束形成算法所需存储量为三者最小。 为了评估线性调频Z 变换(CZT)波束形成算法成像效果,对平面阵接收信号进行仿真验证,仿真条件如下: 假设平面阵由48×48 个阵元组成,阵元间距d=0.5cm,波束数为128×128,入射信号中心频率为f0=300kHz,采样频率为fs=900kHz,成像角范围为50°×50°。在距离接收阵20m 处有一个上下底面边长为3 米,棱长为6 米的长方体,不考虑多普勒频移,利用本文论述的线性调频Z 变换(CZT)波束形成算法,对数据进行成像仿真处理,得到成像仿真效果图如图5所示。 为了评估算法精度,对三种算法主瓣宽度与旁瓣峰值进行测试,测试结果如表1所示。 表1:DM、DPS、CZT 波束形成算法精度对比 根据表1可知,在远场条件下,相比于频域波束形成(DM)算法与分级子阵波束形成(DPS)算法波束主瓣宽度,基于线性调频Z 变换(CZT)波束主瓣宽度略有展宽,旁瓣峰值略有增加,但不影响实际成像效果。在近场条件下,由于回波信号作为球面波信号进行处理,对时延参数需要进一步优化,因此近场条件下成像算法在本章节暂不作进一步讨论。 本文研究一种可用于三维成像声纳的平面阵波束形成优化算法,通过将平面阵分成两级子阵,在第一级子阵中采用线性调频Z变换(CZT)算法,第二级子阵对第一级子阵波束信号进行波束抽取,从而形成全阵列波束。通过对三种成像算法计算量与存储量进行对比,在不影响成像精度条件下采用线性调频Z 变换(CZT)方法可有效降低波束形成所需计算量与存储量,提升计算效率,并通过成像仿真验证算法的实时性与有效性。 图1:两级子阵划分示意图 图2:水平抽取二级子阵波束方向分布 图3:DM、DPS、CZT 波束形成计算量对比图 图4:DM、DPS、CZT 波束形成存储量对比图 图5:长方体成像效果图

1.2 二级子阵波束形成



2 计算效率分析
2.1 计算量分析







2.2 存储量分析



3 成像仿真

4 结论




猜你喜欢
舰船电子对抗(2019年4期)2019-09-10
数学物理学报(2019年2期)2019-05-10
测控技术(2018年7期)2018-12-09
物流技术(2017年12期)2018-01-15
综合智慧能源(2016年5期)2016-07-14
舰船科学技术(2016年1期)2016-02-27
电测与仪表(2015年5期)2015-04-09
火控雷达技术(2012年3期)2012-06-05
火控雷达技术(2011年4期)2011-09-30
现代电子技术(2009年14期)2009-09-05
