调车机车无线机车信号和监控系统控制模式探讨
2021-04-22 10:44陆国明中国铁路上海局集团有限公司电务部
上海铁道增刊 2021年1期
陆国明 中国铁路上海局集团有限公司电务部
STP 系统是保障铁路站内调车作业安全的重要设备。STP 与LKJ 系统结合,为调车机车在调车场内的作业提供安全保障,STP 系统获取调车站场的进路信息,行车许可信息,并把调车机车前方信号机的状态、距离等信息提供给LKJ,由LKJ系统根据防护点状态、防护距离等信息产生控制曲线,并根据机车的实际运行速度对机车进行防护,产生卸载、常用、紧急等动作。
STP 系统与LKJ 系统结合,能够有效的防止调车机车在作业时冒进信号、冲撞土挡、挤道岔、超速行驶和超速连挂等事故,其控制模式可分为空线走行模式、蓝灯防护模式、道岔限速模式、区段限速模式、存车线限速模式、尽头线控制模式、出站跟踪调车模式、一度停车点模式、特殊车辆作业模式、无进路动车模式,本文我们对STP 特定的几个控制模式在具体应用中遇到的问题进行探讨。
1 蓝灯防护模式
1.1 蓝灯防护基本控制模式

图1 蓝灯防护情况下的控制模式曲线
蓝灯防护模式是调车控制中最基本的防护模式,是STP应用最广泛的控制模式,防护机车冒出信号机、防止挤岔等事故。机车前方为关闭信号,防护车列在关闭信号的安全距离外停车,相当于LKJ 正线运行时的红灯停车模式。调车司机确认地面信号后,可以对该模式进行解锁,解锁后,系统允许机车按照线路限速运行。其控制模式曲线如图1所示。
1.2 蓝灯防护模式的信号突变讨论
在实际应用中,因为存在轨道区段分路不良以及调车监控自身的走行误差等情况,容易出现车列轮对实际已经越过信号机,但联锁系统前方的区段未占用,导致前方白灯信号突然被关闭,限速突降,引起机车直接紧急制动。限速曲线如图2所示。
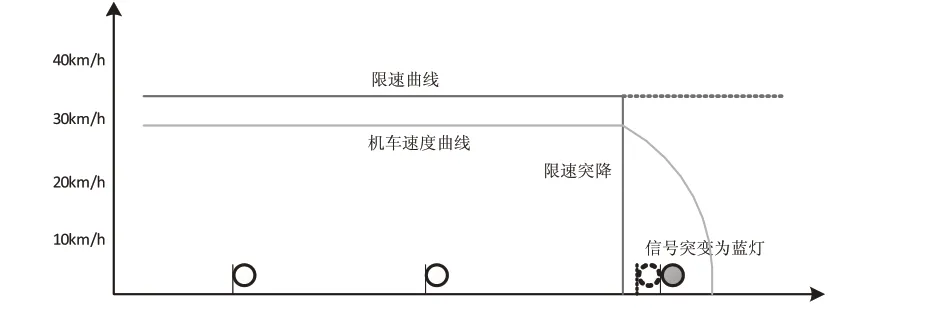
图2 限速曲线
此种情况引起的限速突降,导致机车直接紧急制动,因距信号机近,实际上车列会冒出信号机,进入到下一进路的控制模式。这种现象在专用调车场出现的频次比较比较高,突然的紧急制动容易造成车辆车钩损伤,引起人身安全事故。针对上述情况,应在蓝灯防护的基础上增加信号突变模式,信号突变时,增加司机人工确认机制,采用报警加限速延后变化方式进行控制。
在前方信号由允许信号变为禁止信号时,系统应按照机车的实际运行速度判断是否能在信号机前制动停下,如果能防止车列越过信号机,则应该立即启动蓝灯防护模式,让限速曲线下降,机车紧急制动公式为:
S=SK+Se+Sɑ=v0tk/3.6+4.17(v0 2-vm2)/(1000φhδhβc+ω0+ij)+Sɑ
式中:SK为制动空走距离,m;Se为有效制动距离,m;Sɑ为附加距离,m;v0为初始速度,m/s;tk为空走时间,s;vm为末速度,紧急制动时为0,m/s;φh为闸瓦换算摩擦系数;δh为列车换算摩擦系数;βc为常用制动系数;ω0为基本阻力,N/kN;ij为坡道千分度,‰;
以调机牵引50 辆货车,运行速度40 km/h 时实时紧急制动为例,计算紧急制动距离为118 m,即机车信号突变,距信号机118 m才能保证在车列不冒出信号机。
在STP 蓝灯控制模式下,如判断前方信号由白灯变为蓝灯,当距离信号机较远,能确保停止信号机前方时,应立即启动限速模式,让车列停车。当离信号机比较近时,有可能越过该防护信号机,则应该启用报警模式,由司机确认信号,司机7 s未确认信号,再启用紧急制动方案。控制模式如图3。

图3 在STP蓝灯情况下的控制模式
1.3 蓝灯防护模式的解锁控制讨论
调车作业中,因存在压岔折返以及原进路折返等多种非正常进路调车的作业方式,在作业过程中,需要经常用到蓝灯防护模式的解锁功能,当前调车监控的蓝灯解锁模式,司机解锁完成,调车限速直接上抬至进路限速,交给司机控制,当机车越过当前信号机时,按照下个基本进路进行控制。
蓝灯防护模式在实际运用过程中,存在以下两个跟安全相关问题,一是解锁后限速上抬至进路限速,容易给司机直观的印象,后续不会控制,形成依赖性,实际作业过程中频繁的使用解锁功能;解锁后,当机车越过当前蓝灯后,按照下一进路控制,如果下一进路仍然为关闭信号,且距离很短,会导致限速突降,引起紧急制动,其控制模式曲线如图4。
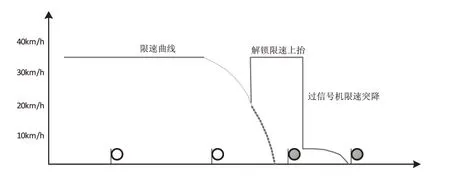
图4 蓝灯防护模式情况下的控制模式曲线
蓝灯解锁后的控制模式,可以参考LKJ 正线运行模式下的走停走模式进行控制,司机解锁后,目标限速上抬至15km/h(可设置),当机车越过蓝灯信号机后,允许以15km/h走行20m,之后恢复限速的正常控制。采用该模式后,可以预防司机的习惯性解锁,减少司机不按规定解锁后引发的挤岔等事故。越过蓝灯后维持20m 的限速控制,防止在前方继续蓝灯情况下的限速突降引起的紧急制动。其模式曲线如图5。

图5 蓝灯解锁后模式曲线
2 存车线限速模式
车列进入有车股道或者有车区段内解挂车时的,当车列接近存车区段的防护信号机,控制连挂限速至存车线允许最高限速,在有确切的存在距离时,连挂安全距离内,限制机车的速度不得超过连挂的最高限速,防止超速连挂。在存在车距离未知时,STP 只控制存车线最高限速,不控制连挂限速,存车线允许最高限速及连挂最高限速可以由LKJ限速模式设置。其控制模式曲线如图6所示。

图6 车列进入有车股道或者有车区段内解挂车时的控制模式曲线
2.1 存车线模式最高限速控制讨论
存车线模式的最高限速起控点在进路的始端信号机处,并非存车区段的始端,在实际的调车作业中,一般存车股道都会有接近岔区,按照站场的设计,有的岔区长度比较长,从进路始端到存车区段可能有100多米的距离。按照铁路技规或者站系规定,存车线最高限速一般指机车进入存车股道的最高限速。目前存车线最高限速的控制比规定要求的要早,在相对繁忙的站场,会影响调车效率。如图7 的实际存车线控制模式存车线最高限速的起控点,应按照铁路技规和站系规定从存车股道的起始点开始控制,在股道的岔区比较长的情况,能提高调车作业效率,如图7 的优化后存车线限速模式。其控制模式如图7。

图7 存车线控制模式
2.2 存车线模式未知存车线控制讨论
目前版本的STP 控制模式,未知存车线只控制存车线的最高限速,进入存车线内,完全交给司机或者平面调车控制,存在比较大的安全隐患,如图8 的实线控制曲线。未知存车线的设计中,应加入语音及人工确认环接,把超速连挂的风险降到最低。
在进入存车线时,应有明显的限速下降过程,并语音提示“前方存车线”,司机确认后再恢复到存车线的最高限速控制,这样能显著的提醒司机注意前方为存车线,且能防止股道内车列停在近端的超速连挂问题。其控制模式如图8的虚线所示。
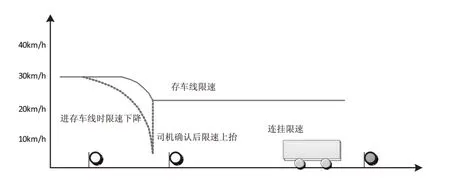
图8 进入存车线时的控制模式
3 尽头线限速模式
车列前方为线路尽头,一般指机待线或者牵出线,当车列头部接近尽头线的防护信号机时,限速降为尽头线允许最高限制速度。当车列前方靠近尽头标时,控制机车在尽头标的安全距离外停车。尽头线允许最高限速可以由LKJ 限速模式设置。其控制模式曲线如图9所示。
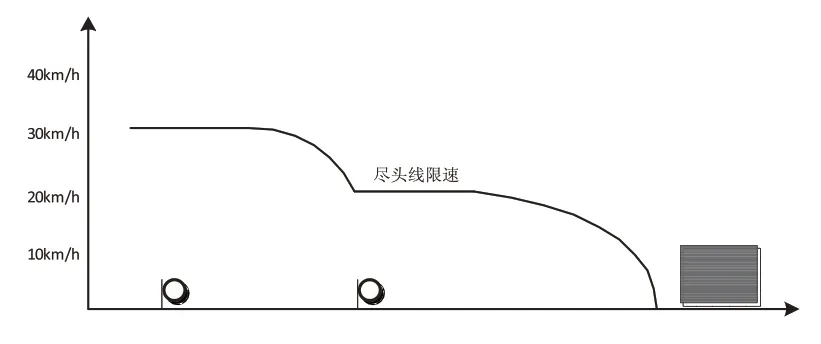
图9 车列前方为线路尽头时的控制模式曲线
尽头线的起控点为进入尽头线的最后一架防护信号机,在实际的使用中,存在最后一架信号机到实际的土档有比较长的岔区,甚至可能达到500 m 以上,按照上述模式,会对调车运输效率有比较大的影响。尽头线最高限速的起控点,应按照铁路技规和站系规定从尽头区段的起始点开始控制,该模式曲线和存车线最高限速的起控点一样,在此不做累述。
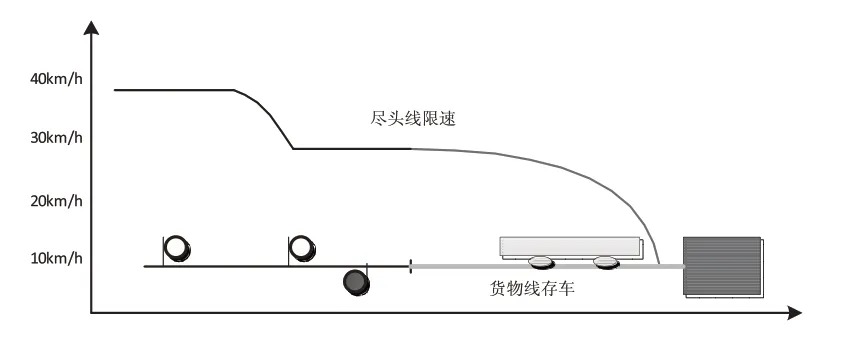
图10 专用调车场内的控制模式
专用调车场内,货物线的作业模式主要为推送作业,用于存储车辆。一般的货物线内电气化轨道区段只有一截保护区段,不超过25 m。从联锁系统上观察,货物线内有车停留,但轨道电路没有占用信息,不能区分该货物线内是否存有车辆,STP系统按照普通尽头线模式控制,存在比较大的安全隐患,如图10所示。
对于货物线内的存车和尽头线混合控制,系统的控制难点在于没有轨道区段的占用信息作为控车依据,不能得知货物线内是否有存车,且不能像股道存车一样能计算出精确的存车位置。STP在遇到此种情况时,首先应保证安全连挂,采用未知存车和尽头线控制两种曲线并行的方式控制,哪个限速低按照哪个控制。进入货物线内后,走行时采用声光报警,且距前方距离显示未知等方式提醒司机注意前方存车。控制模式如图11。

图11 货物线内的存车和尽头线混合情况下的控制模式
4 结束语
STP 系统经过多年的应用,已经能防止调车作业中绝大部分的闯蓝灯、挤岔、超速连挂、冲撞土档等调车事故的发生。调车作业有其特有的复杂性,站场的情况比较复杂,分路不良、信号突变、连续溜放、再次连挂等作业方式都会影响系统的正常防护作业。且调车作业也需考虑运输效率,在保证安全的前提下,不能影响车站的正常生产。介于以上因素,STP的控制模式在应用过程中可适当的做出改变,以便能更好的服务于调车安全作业。
猜你喜欢
云南画报(2021年11期)2022-01-18
铁道通信信号(2021年9期)2021-10-19
铁道通信信号(2021年6期)2021-07-08
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2020年2期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
科技视界(2020年8期)2020-05-18
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年10期)2019-11-25