无人控制系统总体设计综述
2021-04-23 22:33于涛张河宁
专用汽车 2021年10期
于涛 张河宁


关键词:无人控制 遥控操作 自主行驶
1前言
近年来,无人驾驶已经引起社会各方面的关注。作为国家重点发展的无人驾驶产业,无人驾驶技术是发展趋势。随着计算机控制技术的发展。自动控制被应用于无人驾驶领域。
2国外发展现状
20世纪70年代科技发达国家开始率先进行无人驾驶汽车研究。1984年,美国国防高级研究计划署(DARPA)与陆军合作,发起自主地面车辆(ALV)计划。为了推进无人驾驶技术更快、更好地发展。DAPRA于2004~2007年共举办了三届DARPA无人驾驶挑战赛。20世纪80年代开始,美国著名的大学如卡内基梅隆大学、斯坦福大学、麻省理工学院等都先后加入无人驾驶汽车的研究工作中,直接研发SAE Level4级别的无人驾驶汽车。2016年8月.nuTnomy成为了新加坡第一家在试点项目下推出自动驾驶的出租车公司。
3国内发展现状
我国汽车制造厂商对无人驾驶汽车的研究与欧美等发达国家和地区相比稍晚.从20世纪80年代末才开始。清华大学在国防科工委和国家863计划的资助下,从1988年开始研究开发THMR系列智能车。THMR-V智能车能够实现结构化环境下的车道自动跟踪。1992年.国防科技大学成功研制出中国第一辆真正意义上的无人驾驶汽车。2011年7月。由一汽集团与国防科技大学共同研制的红旗HQ3无人驾驶汽车完成286 km的面向高速公路的全程无人驾驶试验。2012年,军事交通学院的“军交猛师III号”以无人驾驶状态行驶114km.最高速度为105km/h。
4无人控制系统总体设计
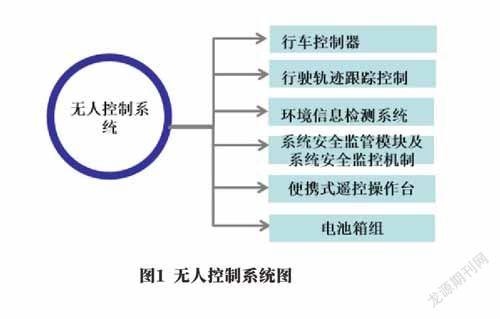
无人控制系统包含行车控制器、行驶轨迹跟踪控制、环境信息检测系统、系统安全监管模块及系统安全监控机制、便携式遥控操作台、电池箱组.如图1所示。行车控制器与环境信息检测系统集成安装在车辆上,通过便携式遥控操作台.可实现对车辆近距离遥控操作、远距离遥控操作以及按任务规划自主行驶等控制模式。
4.1行车控制器
行车控制器采用四核处理器i.MX6。i.MX6处理器基于ARM Cortex A9架构。针对消费电子、工业控制和汽车应用领域设计,含4个ARM。CortexTM-A9内核,运行频率可达1.2GHz.并带有1MBL2缓存和64位DDR或2通道、32位LPDDR2支持。这个系列的器件集成FlexCAN、MLB总线、PCI Express。和SATA-2,具有卓越的连接性,同时集成LVDS、MIPI显示器端口、MIPI摄像机端口和HDMI v1.4.是先进的消费电子、汽车和工业多媒体的理想应用平台。
行车控制器主板见图2。除上述技术特征.板上还集成了10/100M以太网口,USB HOST接口,双路隔离CAN总线接口,RS232接口,RS485接口,HDMI显示接口以及丰富的IO接口及SPI串行接口。
行车控制器还集成了带备用电池的RTC.为运行日志文件提供时间基准。
4.2行驶轨迹跟踪控制
无人驾驶作业时,行车控制器上运行行驶控制软件,基于车辆行驶状态反馈信息,实时决策车速与转向机转角.从而精确控制车辆行驶轨迹。此控制过程中涉及车辆行驶过程的轨迹跟踪控制。
车辆的轨迹跟随控制包含两部分:一部分是速度跟随控制,这部分反映的是车辆的纵向动力学控制;另一部分是路径跟随控制,它反映的是车辆的侧向动力学控制。轨迹跟随控制的首要目标就是实现对期望路径与期望速度的跟踪,本质上反映的就是对车辆运动状态的控制;其次,在进行轨迹跟随控制的过程中,还需要确保车辆的稳定性.尤其是在极限工况下的稳定性。
4.3环境信息检测系统
4.3.1环境信息检测系统传感器
为确保自动行驶状态以及遥控行驶状态的安全.构建环境信息检测系统传感器布置方案。
左前摄像头和右前摄像头并列安装在车体前方,通过双目视觉算法,并与前向激光雷达数据进行数据融合,测定行驶前方50m距离内的障碍物距离,保证前向行驶安全。
左后激光雷达与右后激光雷达安装在车体后方,通过交叉设置,可测量车尾半径20m内的障碍物距离,以保证车辆倒车时的安全。
车体正中上方安装云台摄像头,可远程遥控,360°旋转.视频数据流通过图传电台回传控制端,用于工作人员远程监视车辆运行状态。
车体上还将安装多模定位单元与电子罗盘,以实现车辆本体的定位。
4.3.2环境信息检测系统架构
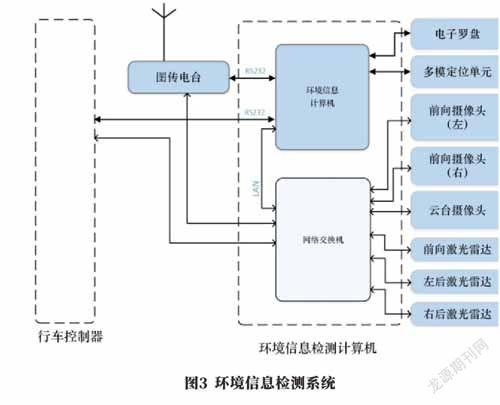
环境信息检测系统构成见图3。三路激光雷达与三路摄像头接入车载网络交换机。环境信息处理计算机通过局域网访问各设备.实时读取数据。环境计算机通过RS232151连接多模定位单元与电子罗盘,实时读取数据,精确定位车辆。
远程控制单元通过图传电台连接的车内局域网.可直接连接视频数据流.或者通过TCP/IP协议与环境计算机交互数据包.实现指令下达与状态数据回读。
4.4系统安全监管模块及系统安全监控机制
系统安全监管模块将集成独立的电源转换芯片、数传电台、单片机以及接口电路。系统安全监管模块可关断母线电源.可超越行车控制器,为制动控制器提供明确的驱动控制信号。在“遥操控”和“自主行驶”控制模式,系统安全监管模块作为系统安装监管的“看门狗”.行车控制器需通过RS232接口定时向本模块提供喂狗信号,遥控地面站需通过安全监管数传电台定时向本模块提供喂狗信号。任何定时周期内没有喂狗信号时,系统安全监管模块判定系统异常,如果车辆正在行驶,本模块可直接切断主电源,使驱动电机停转,同时发出制动指令。
基于电子地图的作业路径规划软件设计自动行驶时,车辆的行驶轨迹采用离线规划算法产生,这个过程由一套基于电子地图的作业路径规划软件(见图4)来保障。
路径规划软件采用C语言编写,通过Qt集成开发环境编译。该软件通过百度地图加载电子地图.既可通过手动制定路径点的方式来人工规划作业路径,又可以通过设定电子围栏设定约束条件,自动规划作业路径。图5为人工规划作业路径的示意图。
路径规划软件产生的路径文件可以拷贝到行车控制系统后,车辆即可依据该文件读取路径点,自动行驶。
4.5便携式遥控操作台
便携式遥控操作台作为控制设备辅助操作模式.主要用于接收车辆测与控制系统的参数及各项数据.并对整车进行过程监控和控制。操作台包含面板按钮、指示灯、操作摇杆、数传电台、NanoPi2嵌入式计算机以及状态显示屏、锂电池组及电源管理电路等主要部件。
该遥控操作台提供了车辆本体以及环境感知设备的遥操作控制界面以及状态信息显示界面。通过组合摇杆以及操作按钮,一个人即可通过图像反馈,遥控操作车辆行驶、转向、变速。
便携式遥控操作台具有参数显示、过程监控和远程控制等功能.主要由远程过程监控和远程控制组成。通过车载摄像头和激光雷达等设备对周围环境进行感知,通过4G网络或无线电台接收器传输到便携式遥控操作台。
4.6电池箱组
电池箱组通过对比储能电池的性能、用途、能量密度、正极材料选择。电池箱组选用锂电池箱组。其优势为:质量比能量高、体积比能量高、功率密度高、电压平台较高。
充放电方式:电池组先串联后并联.电池组需同时充电或放电。保证电池寿命的一致性。
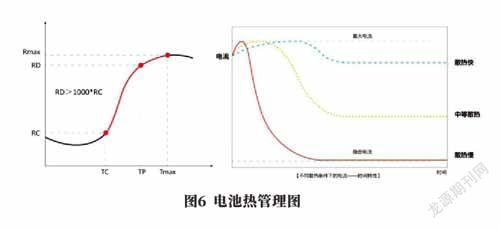
温控管理系统采用PTC加熱方式见图6.PTC全称为正温度系数热敏电阻材料,分为聚合物PTC和陶瓷PTc两种,本方案采用陶瓷PTC。
PTC特性:随着温度的上升,自身导通电阻持续增加,从而实现自限温及热平衡。散热越快.PTC发热组件达到热平衡的时间越长.维持电流越大。
5结语
无人控制系统技术将是未来发展方向。随着无人技术的成熟,它将发挥更加安全、可靠、高效的作用,其发展空间更广阔。