
接触式轮廓仪自动标注模型分析
2021-04-26 04:12付美鑫
科学技术创新 2021年10期
付美鑫
(长春汽车工业高等专科学校,吉林 长春130000)
全国大学生数学建模竞赛创办于1992 年,随着赛事的发展,参加竞赛的学校越来越多,尤其是专科组。本文将对2020年全国大学生数学建模竞赛D 题进行分析和求解。
2020 年全国大学生数学建模竞赛D 题是接触式轮廓仪的自动标注的问题,主要应用最小二乘法的思想,建立了接触式轮廓仪自动标注的模型,包括斜线模型、圆弧模型、旋转平移模型等,通过模型对工件需要标注的数据进行求解,并对工件进行标注。
1 问题简述
在工业生产中,工件表面测量方法分类很多,常见的分为接触式和非接触式[1],其中接触式轮廓仪,广泛应用于光学元件、精密五金、机械加工等工件,在测量仪器中有着举足轻重的地位[2]。接触式轮廓仪在测量时,探针随着被测工件表面匀速滑行,上下移动,在X 和Z 方向分别采样,并通过传感器转化为电信号,经过计算机处理得到被测工件的表面轮廓图[3]。现要对表面轮廓图进行标注,主要标注的各项参数值包括:槽口宽度、圆弧半径、圆心之间的距离、圆弧长度、水平线段的长度、斜线段的长度、斜线与水平线的夹角和人形线的高度。有时在对工件做多次测量时,由于放置的水平位置和角度的不同导致测量结果有明显的差异,同时给轮廓图的标注带来很大的阻碍,建立相应的数学模型,完成以下问题:
1.1 标注工件1 的各项参数值。
1.2 针对有角度偏移和水平偏移的工件1 数据进行校正,对校正数据进行重新标注,并比较矫正后数据与原始数据标注之间的偏差。
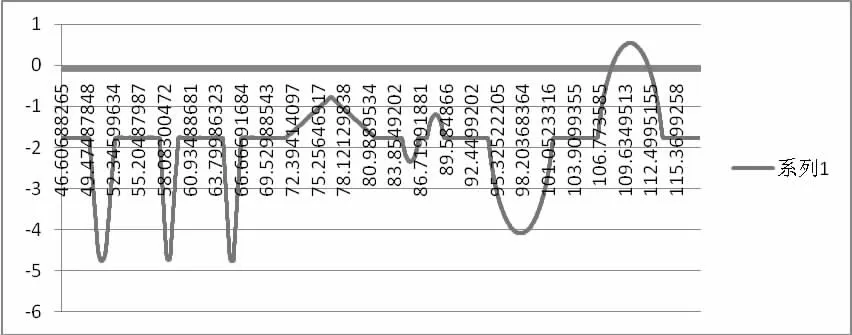
图1 提取数据之后的轮廓图
1.3 针对工件2 给出的10 次测量数据,给出每次测量时的倾斜角度、并标注轮廓线的各项参数值,画出工件2 的完整轮廓图。
1.4 根据进一步给出的圆和角的测量数据,对1.3 中的结论进行修正,并完成轮廓线的修正。
2 问题分析
由于测量仪测量时在工件上匀速滑行,在X 和Z 方向进行采样,由于采样间距极短,且是等时间间隔获取,导致相邻很大部分数据差异不明显,本文所有模型建立求解所使用的数据都是每隔15 个数据进行提取一次,获取新数据。通过EXCEL 画图,可以清晰看到提取的数据保持工件原貌,(如图1 所示)。
3 模型建立与求解
针对问题一:以工件x=-1.77 为水平线,建立坐标系,要求解槽口宽度、斜线段长度、弧长、圆心之间的距离等,首先要建立斜线模型和圆弧所在圆的模型,然后利用交点,确定相应的槽口宽度、斜线段长度、人形线高度、弧长、圆心之间的距离等标注参数。其中,建立斜线模型:
zi= kxi+ b( k , b为 参数);
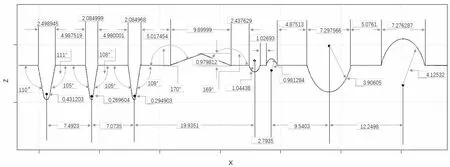
图2 轮廓线标注图
在求解圆弧弧长与半径时,基于点到圆心距离等于半径理论,在工件凹槽处取最低点,以该点为中心,向前向后分别取20个数据,共计41 个点,利用点到圆心距离等于半径建立圆弧模型:
( xi- x0)2+ ( zi- z0)2= r2,( x0, z0, r 为参数)
对该线性方程组利用最小二乘法求解,即可得到圆弧的圆心及半径,从而确定圆弧的方程。
利用Mathematica 软件对上述斜线模型和圆弧模型进行求解,即可确定标注参数。对工件标注如图2。
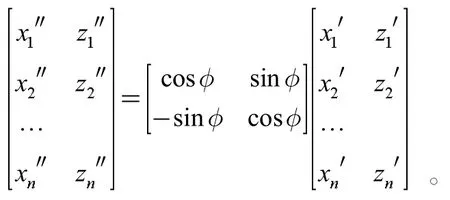
针对问题二,根据旋转角度,与测量工件放置的位置及角度有变化,要对给出数据进行校正,首先要确定旋转角度,建立旋转平移校正模型,先旋转校正,然后进行平移校正,利用前面建立的数学模型进行求解,对工件进行参数标注。
旋转校正模型:
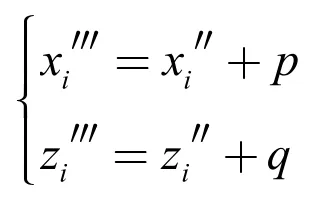
平移校正模型:
针对问题二,做误差分析如下:
对校对之后的工件轮廓图标注参数和工件1 的原始数据的工件轮廓图标注参数分类进行先对偏差分析(校对之后数据记为*),如下:
通过上述相对误差分析发现,水平距离的相对偏差较大,分析原因,主要是由于d9的实际距离较小,测量产生偏差属于合理范围之内,以后测量需要慎重。圆心间的距离偏差最小,在求解圆弧长度、圆心距离、半径时,主要是基于求解圆弧模型,其处理方式主要采取优化处理方法,产生的偏差非常理想,也说明了模型的合理性。
针对问题三:前两问基本解决工件自动标注问题,并建立相应的数学模型,要对工件2 进行标注,首先对所给工件2 测量的十组数据,利用问题二的数学模型进行旋转平移变换之后,对数据进行校正整合,拟合成一组数据,然后对获得的新数据,利用问题一的模型进行参数标注。在对工件2 进行标注时,10 次测量数据,每组数据都存在旋转和水平偏差,所以对10 组数据利用问题二的旋转校正模型和水平校正模型,对数据进行校正。首先确定每组数据旋转角度。通过问题二中旋转角计算模型,得到10 组数据旋转角如下表所示:
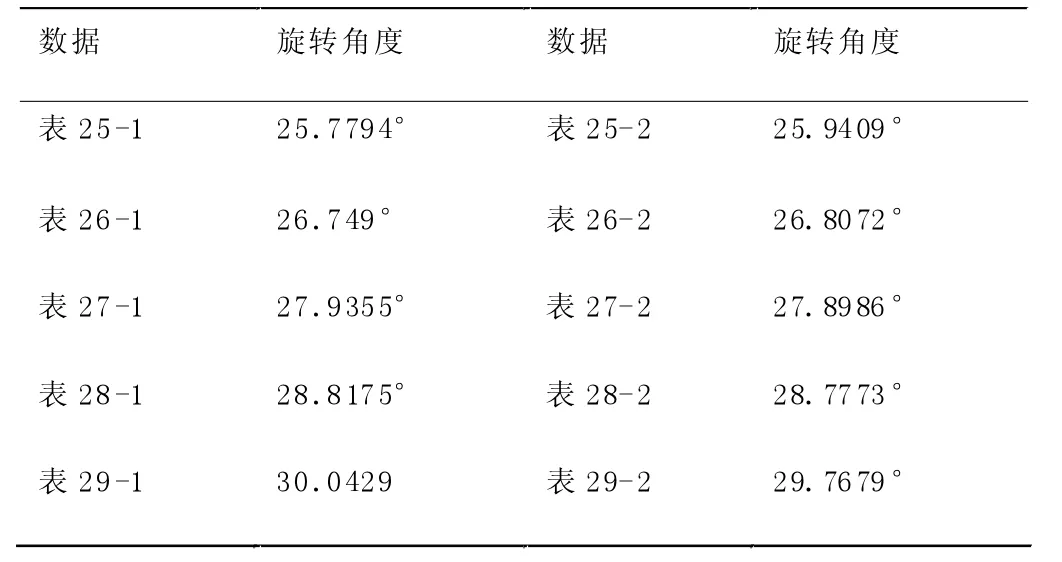
表1 工件2 的10 组数据旋转角
通过对工件2 的10 组数据进行分析,对旋转平移校正得到的数据,进行补充,主要补充缺失数据信息,得到工件2 的大致轮廓图,并对工件做简单标注。针对问题四:工件2 在问题三中已经基本标注完成,但是圆、角的标注还很粗糙,所以针对问题四,将对圆、角数据进行进一步的处理,然后对问题三的轮廓线进行修正。
4 结论
本文针对2020 年数学建模竞赛D 题进行分析求解,从模型求解结果和误差分析可以看出,该模型能够很好的对接触式轮廓仪测量的工件进行自动标注,并标注参数误差较小,该模型是有效的。由于时间问题以及技术硬件要求不足等问题,对于问题三和问题四,只做了数据的相关处理,在后续会进一步对其进行标注。
该模型不仅可以解决针对本文的问题,还可以应用于非球面接触式轮廓仪的自动标注、物体表面样貌的分析等其它测量的自动标注问题。
猜你喜欢
建材发展导向(2022年4期)2022-03-16
电子技术与软件工程(2021年3期)2021-04-20
国学(2020年1期)2020-06-29
学苑创造·B版(2019年4期)2019-05-09
雷达学报(2018年3期)2018-07-18
知识文库(2018年7期)2018-05-14
佛山陶瓷(2017年8期)2017-09-06
北京航空航天大学学报(2017年10期)2017-04-20
飞碟探索(2013年2期)2013-08-13
意林(2010年4期)2010-05-14
