桌面式虚拟环境与真实环境中个体特征影响空间认知能力的差异分析
2021-04-28 00:37黄丽娜张定娆艾廷华
测绘学报 2021年4期
黄丽娜,张定娆,应 申,艾廷华
1. 武汉大学资源与环境科学学院,湖北 武汉 430079; 2. 武汉大学地理信息系统教育部重点实验室,湖北 武汉 430079; 3. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉 430079; 4. 广西壮族自治区地图院,广西 南宁 530023
虚拟地理环境与现实地理环境相对应,利用虚拟现实技术对复杂地理信息系统进行模拟、重构和全息表达,有助于实现对地理环境的感知、认知、理解与探索[1]。在虚拟环境中可以开展控制试验,尤其是在针对人地关系耦合的空间研究中,为研究个体/群体对环境的感知、认知及行为提供了有效的方法和途经[2-4]。随着数字技术的发展,建立虚拟地理环境开展模拟试验已成为ICT大地图时代的一种重要科学研究范式[5-6]。
基于虚拟地理环境的空间认知研究以虚拟与真实“有无相生、虚实共济”的设定为前提[1],通过虚拟环境的模拟试验探究真实环境中人与环境的相互作用。例如,使用三维迷宫分析人们利用全局或局部地标进行空间认知的群组差异[7];通过搭建规则环境和不规则环境分析不同年龄人群对空间信息组织和存储的行为偏好[8];模拟突发危机情景,分析个体在恐惧和警觉等高唤起情绪中的认知水平及从众行为[9]。这些研究的理想情况是在真实环境中开展试验。但由于难以在真实环境中控制试验材料、将被试者从一个环境移动到另一个环境的过程会产生学习效应等。相比之下,虚拟环境灵活性高、试验材料易于组织和控制,因此多数试验都采用虚拟环境来代替真实环境。也有不少认知心理学者认为,虚拟环境存在着难以维持被试本体感受、缺少真实环境的动态性和复杂性、试验过程易受被试者的个体偏好和虚拟现实技术影响等问题[7,10-12],因此,不能将虚拟环境的空间认知简单等同于真实环境的空间认知。得益于嵌入式跟踪设备的发展,在真实环境中开展空间认知试验正受到越来越多的关注[13-14]。如利用眼动仪记录行人借助地图导航的注视行为,发现抽象地图相比详细平面图更有利于用户集中视觉注意,进而帮助用户在室内空间中更快到达目的地[15];空间定位、地图阅读和地图导航不受性别影响,但受到性别与年龄的交互作用[16]。此外,还可利用谷歌眼镜和智能手机获取人们的动作行为,通过状态模型识别运动中的熟悉、陌生、迷路等认知状态[17-18]。
纵观现有研究,往往关注选择虚拟环境或真实环境之一作为试验场景,但对两种环境是否导致认知行为差异却不够重视。虚拟环境中影响人们空间认知的因素在真实环境中是否具有同等作用?反之,在真实环境中表现出的人地关系特征在虚拟环境中是否仍然存在?不同类型的空间环境对人们的行为表现有怎样的影响?这些问题都有待深入探讨。基于此,本文设计对照试验,分别以虚拟环境和真实环境为试验场景,分析两种环境中个体特征对空间认知能力的影响,进而探讨不同环境下空间认知效果的一致性问题。研究结果可以为虚拟地理环境的建立提供理论依据。了解空间认知的个体差异及其环境效应,还可为设计基于虚拟地理环境的认知研究提供先验支持。
虚拟地理环境的建立,有桌面式、墙体式、全景沉浸式和增强现实等多种技术方法[1]。其中,桌面式虚拟环境利用个人计算机屏幕呈现地理场景,设备成本低且操作方便,在导航仿真、驾驶训练等领域研究中广泛应用[19]。结合软硬件条件,本文搭建桌面式虚拟地理环境进行与真实环境的对照试验。
1 三维环境的空间认知试验
1.1 试验设计
本文主要探讨在虚拟环境和现实环境中,个体特征对空间认知能力的影响。通过对比人们在两种三维环境中的空间认知效果和行为响应差异,分析不同场景的环境效应。认知科学领域将认知空间的能力分离为基于对象的空间能力(object-based spatial abilities)和基于环境的空间能力(environmental spatial abilities)两类[20-21]。前者主要通过视觉观察获取空间目标的形态及变换特征(如旋转、组合、分解等),认知空间是物体对象的小尺度空间[22]。后者与大尺度场景和自身运动知觉(self-motion cue)有关,通过在场景中执行搜索、移动等空间任务,不断更新和完善对环境布局及场景要素的认识。认知空间同时也是个体的活动空间。本文将基于对象的空间能力,即通过视觉感知物体形态特征的能力划入个体的基本空间能力范畴,三维环境的空间认知能力则特指在大尺度场景中学习活动空间进而指导执行空间任务的能力。
本文围绕两个问题设计试验研究。
(1) 在三维环境中,个体特征,包括性别、专业背景、基础空间能力等,对空间认知有怎样的影响?性别、专业背景等基本个体特征可从调查问卷中提取。根据心理行为研究[23],当人们在三维环境中寻路时,会激发心理旋转和抽象推理两种认知过程。其中,空间定向与心理旋转有关,空间定位与抽象推理有关[24]。因此,选取心理旋转能力和抽象推理能力来量化表征基础空间能力,作为认知分析的自变量。
空间认知表现通过控制试验来观测。结合文献[25—26]的认知模型,将空间认知分解为对象认知、格局认知、空间响应3个维度,设计如表1所示的相应的空间任务,记录参与者完成空间任务的时间和正确率,作为认知分析的因变量。
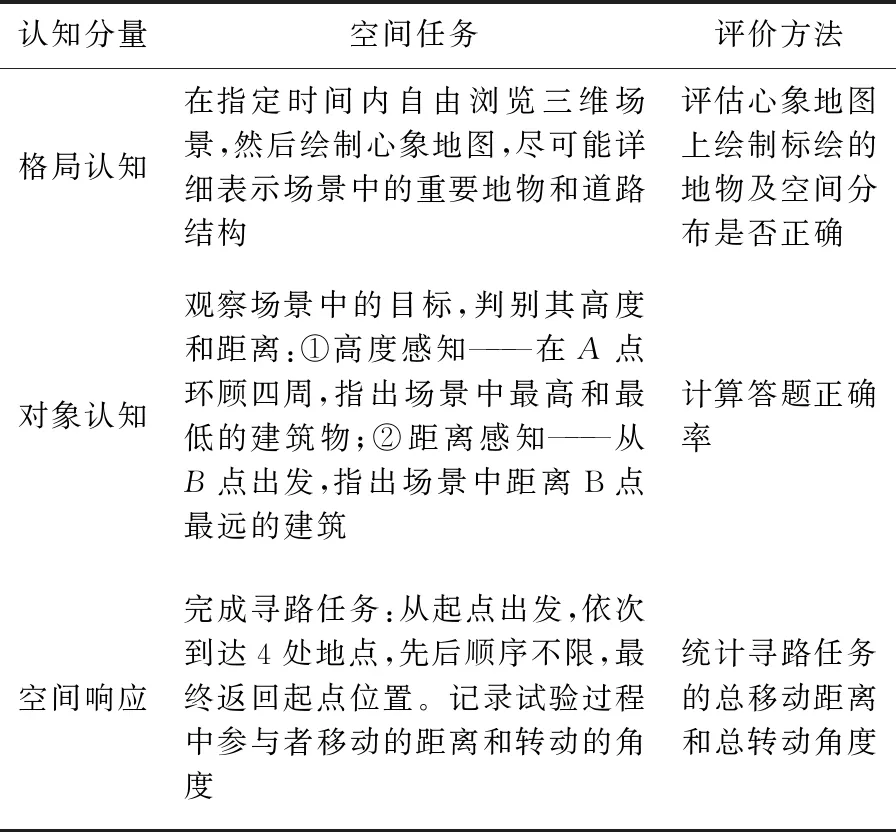
表1 空间任务及评价方法
(2) 人们在虚拟三维环境中的认知表现是否与在真实环境中的一致?若不考虑晕眩、视角差异等生理条件对虚拟现实技术的约束,理想情况下可将虚拟三维环境看作是现实环境的数字孪生[27]。选择试验区域并建立与之相应的虚拟场景,招募对试验区域不熟悉的参与者在两种环境中分别完成空间任务,分析他们在两种环境中的表现。采用多因素混合模型进行差异分析:三维环境类型(真实环境、虚拟环境)、个体特征(性别、专业背景等)和空间认知效果(对象认知、格局认知、空间响应)。根据前人的空间认知试验研究[12,16,28],对照分析的样本规模不少于12人,且各因素分组规模均衡。
1.2 试验材料
(1) 研究区域。本文设计对照试验,主要关注在相似场景的不同类型环境(虚拟和真实)中人们的空间认知表现,试验者需要先后在两种环境中完成空间任务。大学校园是一种布局相对简单且完整的活动空间,从真实环境可达性和虚拟环境配对的可操作性考虑,选择武汉大学信息学部校园作为试验区域。利用SketchUp建立两个虚拟三维场景:一为普通城市场景(图1(b)),用于练习试验,指导参与者熟悉试验环境和相关操作;二为信息学部校园对应的虚拟场景(图1(c)),用于正式试验,与真实场景构成配对环境。
(2) 问卷。获取参与者的基本信息,并基于普通能力倾向测验量表(general aptitude test battery,GATB)测评其基础空间能力[29]。包括心理旋转能力测试(mental rotation test,MRT)和抽象推理能力测试(abstract reasoning test,ART),分别由5道样题和10道评测题组成,具体如图2所示。
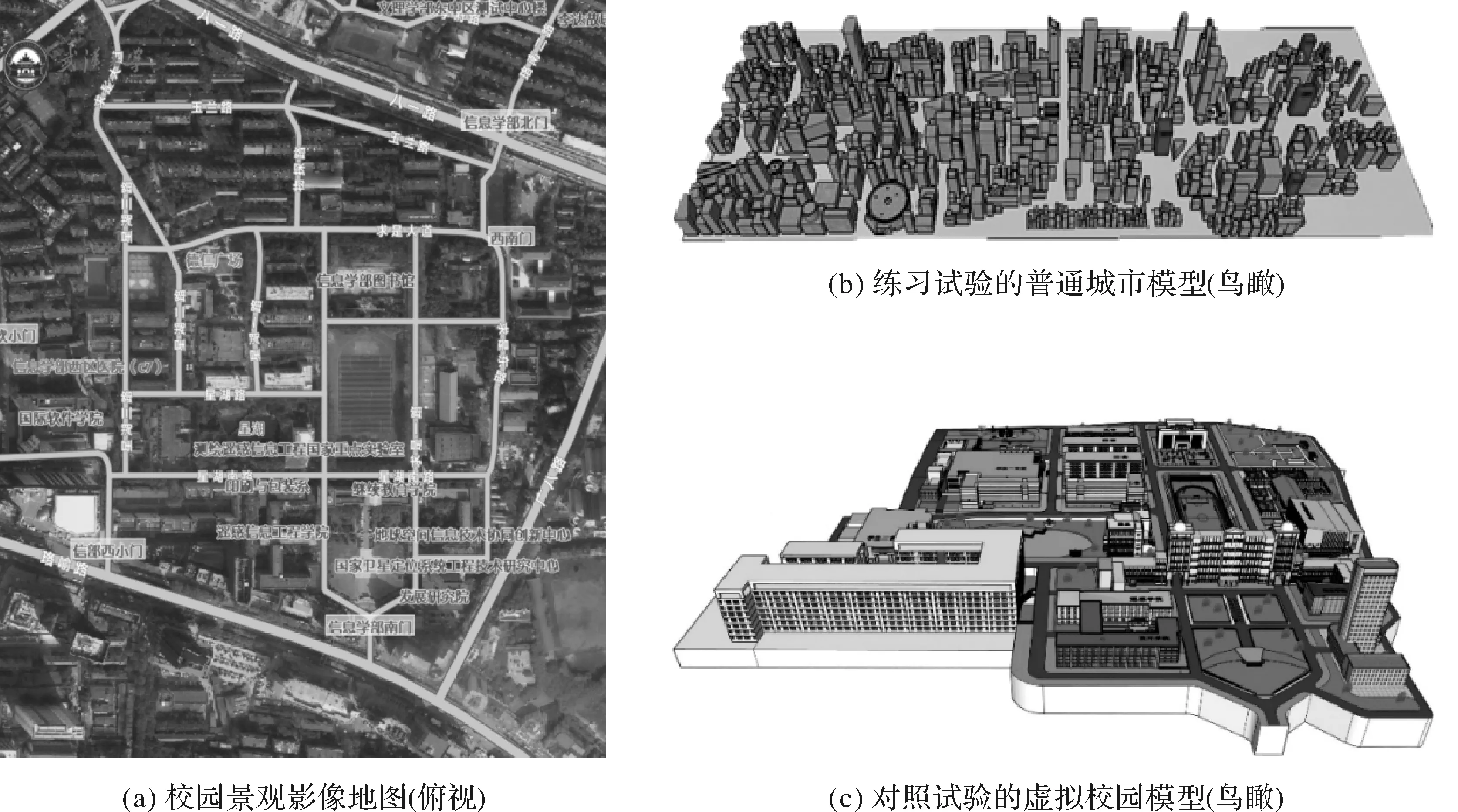
图1 试验区域与试验材料Fig.1 Experimental area and materials

图2 基础空间能力测试例题Fig.2 Samples of basic spatial ability test
1.3 参与者选择和试验流程
为了保证对试验环境的熟悉程度相当,要求参与者均未到过试验区域或使用试验区域的三维场景模型。根据《2018上半年中国VR市场调查》(http:∥www.sohu.com/a/235255974_310972),目前中国的VR用户主要为年轻高知人群,因此,最终招募了武汉地区67名大学生参加试验。
试验分为3个阶段,流程如图3所示。第1阶段任务,即用户画像和MRT、ART测试问卷。参与者进入问卷系统答题,作答完毕时交卷确认。第2阶段,参与者通过练习场景熟悉软件操作后开始正式试验。首先,以自由视角浏览校园场景1 min以初步了解校园格局,绘制场景地图展现其空间格局认知水平;然后,以第一视角进入虚拟校园,根据指示逐步完成对象认知和寻路任务,并绘制寻路地图。第3阶段,参与者进入真实校园环境完成空间任务,再次绘制寻路地图。试验过程中,为避免试验场景相似而形成记忆干扰,两个场景的对象认知和寻路任务均使用不同的空间目标。参与者全程佩戴TobiiGlass 2眼镜,监测其注视对象的眼动轨迹和执行空间任务时的运动路线。试验后辅以访谈,了解参与者的试验体验和任务策略。整个过程遵循试验伦理规范,所有参与者都同意试验程序并自愿参加,且在试验过程中也可随时退出。

图3 试验流程Fig.3 The experimental procedures
1.4 因子计算
1.4.1 基础空间能力指数
采用单位时间内MRT和ART答题正确率来衡量参与者的基础空间能力。为便于差异分析,需对计算结果进行归一化处理,如式(1)所示。
(1)
式中,Si表示参与者i的单位时间答题正确率,Smax和Smin分别表示所有参与者单位时间答题正确率的最大值和最小值。MRT指数与ART指数的计算方法相同。
1.4.2 格局认知指数
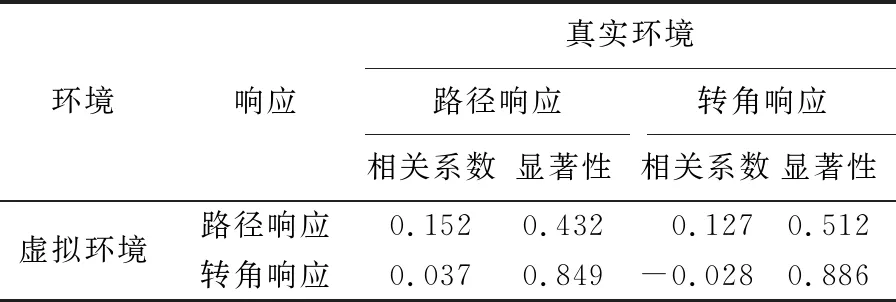
将心象地图作为参与者环境认知的具象化表征,从场景地图中提取地物和道路结构,评估其环境格局认知的能力。其中,心象地图的有效地物包括有形地物(如建筑、设施或路段等)和无形对象(如方向、交通的描述)。道路结构指对道路交叉口模式的识别,分为正交、斜交和折弯3种,如图4所示。考虑到垂直交叉口对认知能力的要求最低,基于垂直关系表示路径结构时,容易忽略折弯结构而导致拓扑错误,而折弯是指一条路段中发生方向的变化,对折弯结构的记忆需要更高的认知能力,将正交交叉口、斜交交叉口和折弯交叉口的数量赋权分别为w1、w2、w3,有w1 图4 道路结构认知因子提取示例Fig.4 The example of extracting road structure cognitive factors 因此,格局认知指数的计算公式为 (2) Li=Count(Landmarksi) (3) Ci=Count(Cross 1i)×w1+Count(Cross 2i)× w2+Count(Cross 3i)×w3 (4) 式中,CIi为参与者i的格局认知指数;Li表示心象地图中地物的数量;Ci为心象地图中道路结构认知得分;Count(Cross 1i);指正交交叉口数量;Count(Cross 2i)指斜交交叉口数量;Count(Cross 3i)为表达正确的折弯点数量。 根据试验设计,虚拟场景与真实场景的格局相似,并且只在第2任务阶段要求参与者绘制场景地图,之后绘制的认知地图是参与者完成空间任务的寻路地图。因此,格局认知指数的计算主要从场景地图中提取认知要素,若两次寻路地图中有新增或变化要素,则按时间先后顺序修正统计数量。本文未对交叉口赋权开展专门研究,取w1=1、w2=2、w3=3。 1.4.3 对象认知指数 高度和距离的认知任务是开放性问题,考虑到人的视觉感受有一定模糊性,使用自然裂点法对场景内建筑物的高度及与参考点的距离进行分级打分。若参与者的回答属于某一分级范围内则获得对应分值。然后将距离认知得分与高度认知得分并转化为百分数,作为对象认知指数。 1.4.4 空间响应指数 空间响应指数采用完成寻路任务的移动路径总长度和累计转角来量化。参与者需要凭借记忆在无提示条件下从指定地点出发,到达特定目标地,最后回到起点,完成路径闭合。完成空间任务后,回放参与者佩戴的眼动仪的监测记录,将参与者的运动轨迹沿道路中心线展绘到路网上,提取移动路径长度和转角。最佳的空间响应行为应是完成寻路任务的路径最短、转向最小。路径和转角的空间响应能力也需进行归一化,路径响应指数(DI)i和转角响应指数AIi的计算公式与基础空间能力指数的相似 DIi=(Di-Dmin)/(Dmax-Dmin) (5) AIi=(Ai-Amin)/(Amax-Amin) (6) 经过初步整理,本次研究的有效参与者为51人,年龄在18~26岁,专业涵盖化学、医学、珠宝、地理等。其中,男生23人,女生28人;地理学专业27人,非地理学专业24人,且均有三维地图使用经验。 对参与者的空间能力值进行统计分析,结果如表2所示。参与者在虚拟环境中的高度认知指数、距离认知指数、路径响应指数和转角响应指数均优于真实环境。虚拟环境中的能力指数标准差比真实环境小,表明空间认知表现可能更向平均水平收敛。虚拟环境的路径响应指数和转角响应指数较小,表明参与者在虚拟环境中执行寻路任务时定向和移动更有效。 表2 各空间能力因子描述性统计 试验过程中,要求参与者先后以自由视角和第一人称视角完成空间任务再绘制寻路地图,结果得到了有心理旋转和无心理旋转两种类型的认知地图,如图5所示。有心理旋转的认知地图,即执行空间任务后绘制的寻路地图与自由浏览后绘制的寻路地图朝向相同,均采用自由浏览时初始俯视图的视角朝向,这说明参与者在记忆和认知场景时进行了心理旋转和匹配。无心理旋转的认知地图则反之,表现为前后绘制的地图随空间任务的起始视角不同而地图朝向不同。 图5 虚拟环境试验中寻路任务的起始视角及参与者绘制的寻路地图Fig.5 The initial view of way-finding task in virtual scene experiment and the mental road-finding map drawn by participants 与文献[30—31]的研究一致,可按认知要素的绘制顺序将参与者的寻路地图进一步分为自我参考框架、固定参考框架和协调参考框架3种类型,如图6所示。自我参考框架以参与者自身为中心,沿移动方向同步绘制或者先绘制路径再绘制途经地标,关注地标与路径的拓扑关系。固定参考框架则以地标群格局分布建立地图参照系统,参与者在绘制地图时首先绘制足够的场景地物,再在其中勾绘移动路径。相比之下,协调参考框架首先绘制路网作为骨架,然后对地标进行整体布局,再依次标绘经过的路段。 图6 使用不同空间参考框架的寻路地图Fig.6 Mental way-finding maps using diffenrent spatial reference frames 按个体特征因子对空间认知指数进行Kolmogorov-Smirnov检验,除格局认知指数外,其他指数均不具备正态分布特征,故主要采用非参数模型进行个体特征影响空间认知表现的差异显著性计算。根据自然裂点法,可将MRT水平指数分为较高组(≥0.8)、中等(0.8>且≥0.4)、较低组(<0.4)共3组,采用Kruskal Wallis检验模型;可将ART水平指数分为较高组(≥0.8)、较低组(<0.8)两组,采用Mann-Whitney U检验模型。 分析结果表明,专业背景对场景的格局认知、室外路径响应和转角响应均具有显著影响(Sig=0.043,0.017,0.001),如表3所示。对比可知,地理相关专业参与者的格局认知(V=0.458 1)较非地理专业的高(0.322 0)。在真实环境中,地理专业的参与者能够以更短的移动(V=26.227 7)和更少的转向(V=45.833 3)完成寻路任务,具有更高效的空间行为响应。心象地图旋转因子对场景格局认知也有一定的影响(Sig=0.094),无心象地图旋转的参与者具有较高的格局认知指数(V=0.426 9),表明对环境的记忆更准确和详细。 表3 空间认知因子在个体特征上的差异分析 此外,MRT因子对虚拟环境和真实环境的转角响应(Sig=0.037,0.074)、空间参考框架因子对格局认知(Sig=0.000)和真实环境的高度认知(Sig=0.074)也具有统计意义上的影响。对MRT水平因子和空间参考框架因子作事后检验。结果表明,较高MRT组与较低MRT组在真实环境中的转角响应具有一定差异(Sig=0.078,ΔV=-17.500),且较高MRT组的转角响应能力优于较低MRT组。在格局认知方面,自我参考框架组与协调参考框架组(Sig=0.000,ΔV=-0.386 5)、固定参考框架组与协调参考框架组(Sig=0.000,ΔV=-0.280 6)之间具有显著差异,自我参考框架组与固定参考框架组之间有一定差异(Sig=0.056,ΔV=-0.105 7)。格局认知水平表现为:协调参考框架>固定参考框架>自我参考框架。 按环境类型分析参与者的空间认知表现,结果如表4所示。除转角响应外,空间认知能力在虚拟环境和真实环境中均未有明显差异。表明虚拟试验场景建立有效,为使用虚拟场景来代替真实场景提供了实证支持。 表4 空间认知因子在环境类型上的差异分析 需注意的是,转角响应具有显著的环境效应(Sig=0.004)。结合表2可知,虚拟环境的平均转角响应指数(V=23.862 78)小于真实环境(V=30.263 79),说明在虚拟环境中可以更有效的识别正确方向。根据对参与者的访谈,推测原因在于虚拟环境的试验场景较安静,试验者能够专注于执行空间任务,而真实环境中干扰因素较多,如周围行人、行驶车辆、噪音等,一定程度分散了参与者的注意力,导致决策失误。 参与者按先虚拟环境后真实环境的顺序执行寻路任务,但真实环境中的路径响应和转角响应均未表现出优于虚拟环境。计算两种环境空间响应的能力值相关系数(表5),可知均不具有统计意义上的相关性。因此,可认为本次试验中参与者从虚拟环境阶段到真实环境阶段转换的学习迁移效应较小。原因可能是,一方面不同环境的寻路任务出发点不同,并使用了不同的目的地;另一方面,参与者因对试验场景陌生而具有一定的空间焦虑[32],导致不能有效利用在虚拟环境获得的空间格局知识指导在真实环境中执行寻路任务。 以环境类型、专业、MRT水平为自变量,转角响应指数为因变量,进一步分析环境类型、专业背景、MRT水平对寻路任务转角响应的交叉作用。结果表明:专业背景主效应显著(Sig=0.014),MRT水平主效应明显(Sig=0.056),环境与专业类型对转角响应指数的交互作用明显(Sig=0.063)。 表5 两种环境的空间响应因子的相关性系数 相比之下,地理专业组的转角响应(V=40.084 6)明显优于非地理专业组的转角响应(V=62.386 6)。地理组的环境类型主效应不显著(Sig=0.672),但MRT水平主效应显著(Sig=0.04);MRT水平与环境类型之间存在显著的交互作用(Sig=0.005)。如图7(a)所示,MRT水平对转角响应的影响受环境类型的交叉作用:MRT水平中等时,转角响应在虚拟环境中显著优于真实环境(Sig=0.024);但MRT水平较低时,转角响应在真实环境中显著优于虚拟环境(Sig=0.007)。 对非地理组而言,环境类型主效应也不显著(F=0.508,Sig=0.479),而MRT水平主效应显著(F=3.742,Sig=0.029),MRT与环境类型之间也存在明显的交互作用(F=3.251,Sig=0.046)。MRT水平与环境类型交互作用的简单效应检验如图7(b)所示:当MRT水平为中等时,在虚拟环境中的转角响应表现优于真实环境中的转角响应表现(Sig=0.001)。 图7 MRT水平与环境类型交互作用对转角响应表现的简单效应检验Fig.7 Simple effect test on the corner response under the between-subject effect of MRT level and environment type 本文通过实证分析环境类型及个体特征对人们空间认知的影响,将空间认知分为格局认知、对象认知和行为响应3个维度,探讨虚拟环境与真实环境中个体特征的影响及其交互作用。为直观表达,将分析过程和结果梳理如图8所示。 3.1.1 空间格局认知 根据试验分析结果,格局认知能力在性别、MRT水平、ART水平上无显著差异,结合40.58%的案例研究也支持空间能力无性别差异[33],因此认为:对于参与本次试验的大学生群组,性别、心理旋转和抽象推理能力不是空间格局认知的影响因素。然而,专业背景、心象地图旋转和空间参考框架对空间格局认知均有明显影响。地理专业背景组、心象地图不旋转组、协调参考框架组相比于非地理专业组、心象地图旋转组、自我参考框架组对场景格局的记忆明显更详细和准确。这与文献[34]的研究一致。由于地理知识和空间参考框架可以借助后天学习来强化,因此推论通过相关训练可提升人们对陌生环境的空间格局认知能力。本次试验中两种环境的空间认知能力无显著性别差异也可由此解释:参与者的学历水平较高,都有使用三维地图的经验,并掌握了桌面式虚拟环境的应用技能,后天学习经验抑制了性别差异的影响。 图8 试验分析框架Fig.8 Experimental analysis framework 此外,从心象地图还可发现,图上标注的地物数量明显多于道路交叉口数量,表明人们主要通过地标建立与环境空间的关联。这对导航服务具有一定启示:可以在地图上尽可能丰富的标注地标,以帮助人们高效建立地图空间与寻路空间的映射,有助于减轻用户的认知负担和心理压力[35];同时,提供导航服务时需重视关键路口的表达,可考虑突出表达重要认知元素,辅助人们快速进行场景匹配和寻路决策。 3.1.2 对象认知 试验分析表明,个体特征,包括性别、MRT水平、ART水平和专业背景,对对象认知均没有明显影响,人们在虚拟环境和真实环境中的对象认知也没有显著差别。这与影响空间格局认知的分析结果稍有不同。可能的原因是本次试验建立的虚拟环境以提供真实感为目标;并且本次研究的参与者虽然没有到过试验区域和使用过试验区域的三维场景,但对虚拟三维技术环境并不陌生。这也间接证明了虚拟三维环境在一定条件下可以替代现实环境的假设成立,为建设虚拟地理环境的有效性提供了实证支持。 3.1.3 行为响应 参与者通过自由浏览学习空间环境,然后在试验中“凭感觉”寻找指定的系列地点。结果表明,不同环境类型对路径响应没有明显影响,但对转角响应影响显著。人们在虚拟环境中完成寻路任务的累计转角明显小于在真实环境中。结合访谈和分析参与者的眼动数据分析,可能因为虚拟场景试验是在理想的实验室条件进行,周围环境干扰较小,执行空间任务时能够集中注意力;但在真实环境中,环境噪声较多,视域范围更大,并且在寻路过程中除了观察周围环境还需要配合转身、快走等较大幅度动作,注意力容易被分散。提取参与者在试验中佩戴眼动仪获取的眼动数据也佐证了这一论点。参与者在虚拟环境中注视点数量较多且总注视时长更长,表明人们在虚拟环境执行寻路任务时处理了更多的视觉信息[36]。 本文属于验证性试验研究,可以为虚拟地理环境的设计与建立,以及基于桌面式虚拟环境的认知心理与行为研究提供实证支持。需要注意的是,由于技术条件的限制,也存在着一定的局限性: (1) 试验结论的普适性。试验中虚拟环境虽然允许参与者以第一人称视角进入,但仍属于呈现在显示屏幕上的窗口视图,而非完全浸入式的三维空间。桌面式虚拟环境的视域范围明显小于全景视域,尚缺少证据表明本次试验结论也适用于沉浸式VR环境。因此需要改造虚拟场景模型以适应沉浸式虚拟设备,并组建更多对照试验场景,如对称型、放射型场景等,以验证试验结果的有效性。 为降低试验复杂性、聚焦到环境的虚拟和真实二元变量,本文设计对照场景进行配对分析。人们进行空间认知活动的环境类型很多,大学校园仅是其中一类包含建筑和植被的社区尺度活动区域,还可能涉及更复杂的地理环境,如建筑密集的商业和住宅小区,或者视觉线索稀缺(景致相似甚至没有明确的道路结构,或需要借助驾驶设备)的山区和林区。后续研究可以场景配对的思想为基础,设计精细分解和控制各类环境因子的认知试验,增加诸如地标显著性、空间尺度、人文与自然景观属性等新变量。由于环境变量较多,试验研究的关键在于选择合适的真实场景和构建相应虚拟环境,并且扩大样本以满足多因素分析需要。 (2) 样本数据的不确定性。虽然试验参与者的年龄、文化程度和数量符合试验设计要求,但分析数据呈非正态分布。究其原因,可能是由于参与者主要为大学生、随机性较低,参与者数量偏少所致,将试验结果泛化为一般性结论尚需要开展更大样本规模和更多场景的验证。在当前大数据背景下,可考虑设计相应的数据密集型试验[6],从不同尺度和视角进行验证。此外,本文属于被试内设计试验,虽然从试验数据的差异分析和相关性分析都表明虚拟环境试验阶段未对真实环境试验阶段产生影响,但试验设计理论上仍然存在两种试验环境的学习迁移效应和疲劳效应。后续研究可通过平衡试验顺序、增加试验阶段时间间隔等方法进行完善[37],如参与者随机选择先执行虚拟环境任务或真实环境任务,完成第1阶段环境任务后间隔72 h再进入下一阶段。 (3) 深度挖掘视觉认知机理。本次研究参照实验心理学方法设计空间认知试验,并使用眼动技术记录参与者的行为状态和眼动信息。受到眼动仪硬件的束缚,真实环境中因紫外线干扰而无法有效采集注视点和眼动轨迹等指标,故未能充分利用眼动数据作深入分析。基于眼动跟踪方法挖掘人们的视觉搜索过程和认知机理为空间认知研究提供了一条新的途径[36]。后续研究需要充分利用多种监测数据深层次解析空间认知规律。这也是空间认知研究的核心内容。 就虚拟环境而言,场景内容装载的视域范围、空间信息表达的呈现模式、虚拟环境中的人机交互方式等均具有灵活性和多样性,极大提升了人们的空间认知能力[1],同时也增加了探究其视觉认知机理(进而指导虚拟环境构建)的难度[38]。可针对不同认知情景(如信息导览、应急疏散、汽车驾驶等)和不同空间任务(如定位、寻路、视觉搜索等),引入多种生理监测指标(如眼动、心跳、脑电波等)设计精细认知试验,结合数理统计和可视分析等方法,定量和定性分析个体在虚拟环境中进行视觉信息获取、处理和决策的动态过程,深入挖掘人们在虚拟环境的空间认知规律。 本文从虚拟环境与真实环境的共生关系出发,设计两种环境的对照试验,论证了空间认知的个体差异存在环境效应。研究表明: (1) 人们的空间对象认知不受环境类型和个体特征的影响,一定程度上也证明了使用虚拟地理环境模拟现实地理环境开展认知研究的有效性。 (2) 对于空间寻路任务,环境类型对路径响应无影响,但对转角响应影响显著。人们在虚拟环境中可以更有效地识别正确方向;专业背景主效应显著,地理专业组的转角响应指数优于非地理专业组的转角响应指数。MRT水平与环境类型具有显著的联合效应,MRT水平中等时,虚拟环境的转角响应显著优于真实环境;MRT水平较低时,真实环境的转角响应优于虚拟环境。 (3) 空间格局认知受专业背景、心象地图定向风格和空间参考框架的影响显著,具有地理知识背景、心象地图不旋转、使用协调空间参考框架对场景格局的记忆更详细和准确。本文结果为基于虚拟环境进行空间对象认知的模拟试验有效性提供了依据,也可用于指导根据用户特征建立个性化虚拟环境。 由于技术限制,研究也存在着局限性。在未来的研究中,可进一步将桌面式虚拟环境扩展至视域范围更大的沉浸式VR环境,扩充试验场景类型,扩大样本范围和规模。同时,可提升技术方法,如利用虚拟现实设备建立沉浸式三维环境或混合现实场景,增加虚拟环境的多样性、动态性和交互性设计控制试验,并充分利用眼动仪等传感器采集高精度监测数据,深层次探究空间认知个体差异和环境效应的形成过程和机理。
2 试验结果分析
2.1 一般描述性统计分析



2.2 空间认知能力在个体特征上的差异

2.3 空间认知能力在环境类型上的差异

2.4 环境类型与个体特征对空间认知的联合效应

3 讨 论
3.1 环境类型与个体特征对空间认知的影响

3.2 试验研究的局限性
4 结 语
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
华人时刊(2022年21期)2022-02-15
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
载人航天(2021年5期)2021-11-20
广东教育·职教版(2021年7期)2021-08-23
现代营销(创富信息版)(2018年10期)2018-10-12
解放军健康(2017年5期)2017-08-01
计算机测量与控制(2017年6期)2017-07-01
知识经济·中国直销(2016年2期)2016-11-07
华人时刊(2016年13期)2016-04-05