基于Simulink 软件的组合滑模控制仿真实验
2021-05-02 12:52赵海滨田亚男
科技创新与应用 2021年12期
赵海滨,田亚男
(1.东北大学 机械工程与自动化学院,辽宁 沈阳 110819;2.东北大学 信息科学与工程学院,辽宁 沈阳 110819)
滑模控制器具有响应速度快、对参数变化及扰动不灵敏和物理实现简单等优点,广泛用于非线性系统控制[1]。传统的滑模控制器,稳态误差不能在有限时间内收敛到零,从而提出了终端滑模控制的概念。终端滑模控制器能够在有限时间内收敛到零,而且对建模不确定和外部干扰信号具有鲁棒性。快速终端滑模控制器的收敛速度非常快,但是在接近平衡状态时存在奇异问题[2]。本文将快速终端滑模控制器和线性滑模控制器相结合,设计了组合滑模控制器,并采用组合滑模控制器进行二阶Duffing 混沌系统的平衡控制。
本文以二阶Duffing 混沌系统为研究对象,采用组合滑模控制器进行系统的平衡控制,状态变量快速收敛到零。采用Simulink 软件建立仿真实验系统进行仿真实验,并对仿真结果进行分析。组合滑模控制器能够进行不同初始状态Duffing 混沌系统的平衡控制,能够避免奇异问题,具有非常快的收敛速度。
1 二阶非线性系统
二阶Duffing 混沌系统常用于微弱信号的检测[3],是典型的二阶非线性系统。对于Duffing 混沌系统的控制,已经提出很多方法[4-5]。Duffing 混沌系统的状态方程表示为

其中,x1和x2为系统的状态变量,t 为时间,a、b、d 和ω 为常数。当a=0.4,b=-1.1,d=1.5,ω=1.7 时,该系统处于混沌状态。
根据Duffing 混沌系统的状态方程,采用Simulink 软件进行仿真,采用变步长的ode45 算法,最大步长为0.001 秒。Duffing 混沌系统的初始状态设定为x1(0)=0.2,x2(0)=0.3,系统的仿真时间设定为300 秒。
Duffing 混沌系统仿真后,状态变量x1和x2的二维相图,如图1 所示,状态变量x1和x2的响应曲线,如图2 所示,只显示前100 秒。由图1 和图2,可以观察到Duffing系统处于混沌状态。
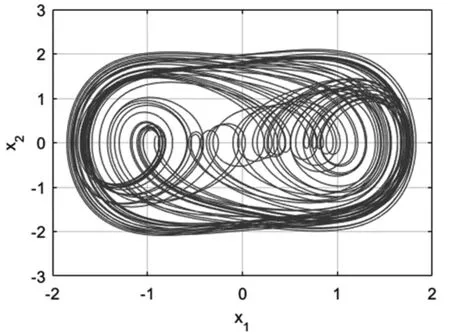
图1 状态变量x1和x2的二维相图
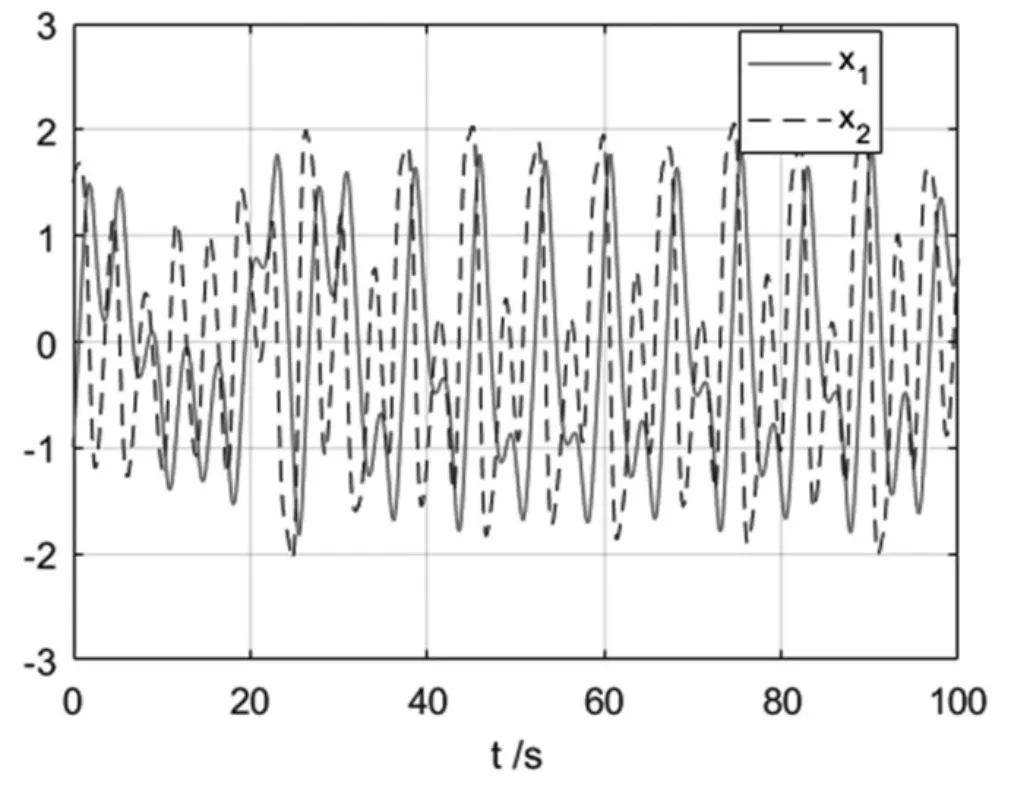
图2 状态变量x1和x2的响应曲线
2 组合滑模控制器
通过快速终端滑模控制器和线性滑模控制器设计组合滑模控制器,采用组合滑模控制器进行二阶Duffing 混沌系统的平衡控制。在快速终端滑模控制器中,设计的快速终端滑模面为

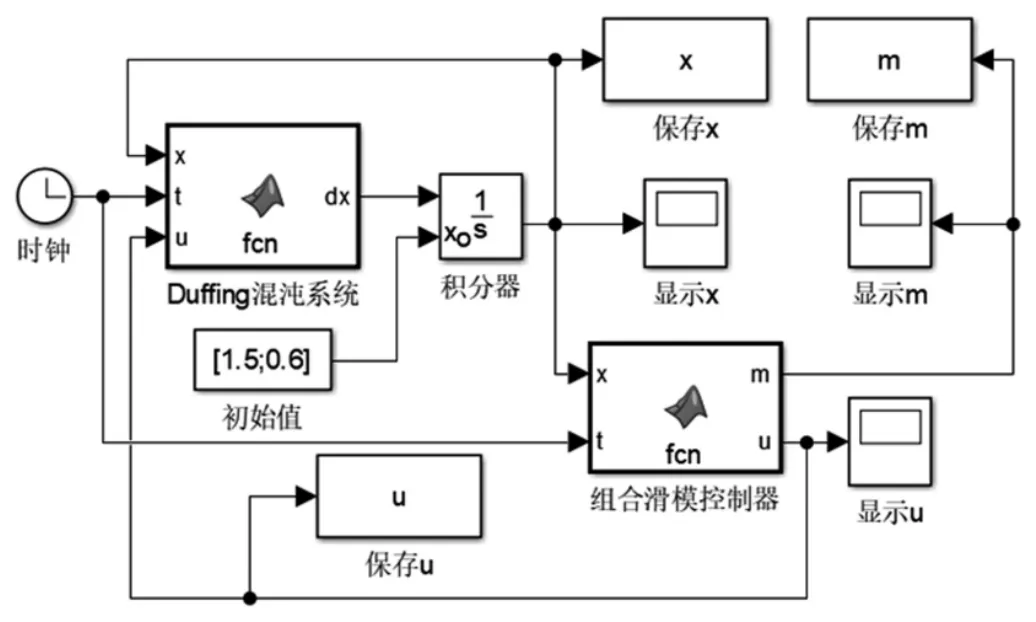
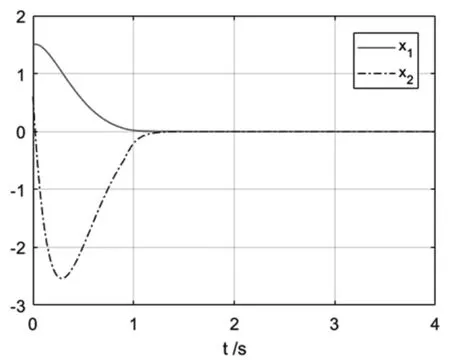
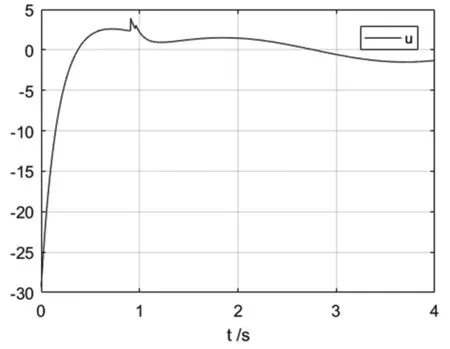
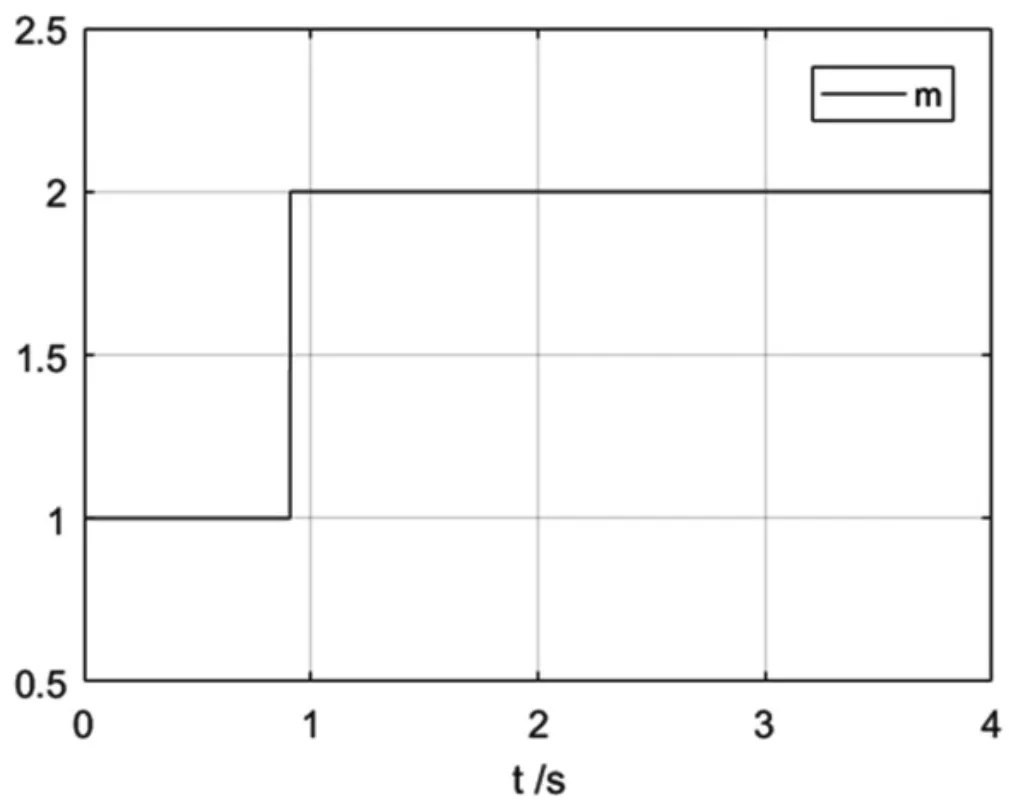
其中,c1,c2和r 为常数,且c1>0,c2>0,0 在快速终端滑模控制器的设计中,采用的指数趋近律为 其中,k1和k2为常数,且k1>0,k2>0。 采用快速终端滑模面和指数趋近律,设计的快速终端滑模控制器为 在线性滑模控制器中,采用的线性滑模面为 其中,c3为常数,且c3>0。 在线性滑模控制器的设计中,采用的指数趋近律为 采用线性滑模面和指数趋近律,设计的线性滑模控制器为 虽然快速终端滑模控制器的收敛速度比较快,但是由于r-1<0,在x1=0 和x2≠0 时快速终端滑模控制器存在奇异问题。首先采用快速终端滑模控制器进行系统的平衡控制,当|x1|燮δ 时,切换为线性滑模控制器。快速终端滑模控制器和线性滑模控制器的切换规则为 其中,u 为组合滑模控制器,δ 为常数,且δ>0。 组合滑模控制器的切换函数表示为 根据组合滑模控制器的切换规则,当采用快速终端滑模控制器时,m=1,当采用线性滑模控制器时,m=2。 在快速终端滑模控制器和线性滑模控制器中,都存在符号函数,会出现抖振现象。本文采用双曲正切函数代替符号函数,用于削弱抖振。双曲正切函数的表达式为 其中,μ 为常数,且μ>0。本文设定为μ=0.001。 Simulink 软件非常适合进行动态系统的建模和仿真[6]。采用Simulink 软件进行组合滑模控制仿真实验,建立的仿真实验系统,如图3 所示。在Simulink 软件中采用变步长的ode45 算法进行常微分方程的数值求解[7-8]。Duffing混沌系统的初始状态为x1(0)=1.5,x2(0)=0.6。在快速终端滑模面中,参数设定为c1=2,c2=2.5,r=0.6。在指数趋近律中,参数设定为k1=4,k2=0.6。在切换规则中,参数设定为δ=0.05。 采用组合滑模控制器进行Duffing 混沌系统的平衡控制,仿真时间设置为4 秒,状态变量的响应曲线,如图4 所示,组合滑模控制器的响应曲线,如图5 所示。切换函数的响应曲线,如图6 所示。图6 中在0.91 秒时,将快速终端滑模控制器切换为线性滑模控制器。 数值仿真结果表明,组合滑模控制器能够进行不同初始状态二阶Duffing 混沌系统的平衡控制,状态变量快速收敛到零。 图3 组合滑模控制仿真实验系统 本文将快速终端滑模控制器和线性滑模控制器相结合,设计了组合滑模控制器,通过切换规则进行快速终端滑模控制器和线性滑模控制器的切换。采用组合滑模控制器进行二阶Duffing 混沌系统的平衡控制。通过Simulink 软件建立仿真实验系统,并进行了数值仿真。仿真结果表明,组合滑模控制器能够进行不同初始状态Duffing 混沌系统的平衡控制,状态变量快速收敛到零。 图4 Duffing 混沌状态变量的响应曲线 图5 组合滑模控制器的响应曲线 图6 切换函数的响应曲线







3 仿真实验
4 结论
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
中等数学(2021年9期)2021-11-22
计算机仿真(2021年4期)2021-11-17
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
防爆电机(2020年4期)2020-12-14
智能计算机与应用(2020年10期)2020-03-18
数学学习与研究(2017年20期)2018-01-02
北京航空航天大学学报(2017年4期)2017-11-23