考虑风电机组频率保护的送端电网有序高频切机策略
2021-05-07 03:49谢宇峥张恒旭李常刚常喜强
电力系统自动化 2021年9期
谢宇峥,张恒旭,李常刚,李 威,王 衡,常喜强
(1. 电网智能化调度与控制教育部重点实验室(山东大学),山东省济南市250061;2. 南瑞集团有限公司(国网电力科学研究院有限公司),江苏省南京市211106;3. 国网新疆电力有限公司电力调度控制中心,新疆维吾尔自治区乌鲁木齐市830063)
0 引言
中国的风能等可再生能源分布高度集中,风能富集地区电网消纳空间趋于饱和[1]。大量风电通过特高压交直流输电通道实现电力大规模集中送出[2-3],扩大了可再生能源消纳范围。当功率外送通道因故中断时,送端电网出现功率过剩与高频问题,并利用第二道防线中的连锁切机快速平抑过剩功率和抑制频率升高。当连锁切机控制拒动时,需通过第三道防线中的高频切机措施来维持频率稳定[4-5]。
高频切机是抑制送端系统频率升高,防止送端系统发生频率失稳的主要手段[6-7]。作为被动控制措施,高频切机动作后需保证系统高频保护不动作。汽轮机超速保护控制(over-speed protection control,OPC)是火电机组高频保护系统的重要组成部分[8],若OPC 控制不当,汽轮机汽门将反复开闭引起功率“振荡”。为避免发生这种情况,高频切机需与OPC 相互配合。文献[9]对多回特高压直流送出系统的高频切机方案进行了优化,但未考虑切机方案与OPC 之间的配合。文献[10]指出忽略OPC会对送端系统高频切机方案的制定产生影响,提出了高频切机与OPC 的配置原则。文献[11]提出高频切机措施先于汽轮机OPC 动作以抑制系统动态频率升高。
系统频率动态随大规模风电并网发生了显著变化,突出表现在系统惯量减少、暂态频率偏移增大和调频能力减弱[12]。实际运行中,风电机组出力波动会影响高频切机方案有效性[13],故应优先切除风电机组,使更多常规机组参与一次调频。文献[12]提出了风电切机措施调整策略;文献[14]建议多源并存外送系统高频时优先切除风电机组;文献[15]指出切除风电机组有利于降低暂态频率偏移和系统频率的恢复。文献[16]基于“最小欠切原则”,提出了考虑OPC 并优先切除风电机组的高频切机方案,制定切机方案时需考虑OPC 与风机高频保护定值之间的配合。
现有的高频切机方案研究大多未考虑风机高频保护定值和直流闭锁后线路功率大幅变化的因素。风电机组要先于常规机组有序切除,以免引起功率振荡或过切现象发生。对于多回特高压直流密集功率送出的电网运行形态,直流闭锁故障不利于送端电网频率稳定,同时还会引起送端电网功率大量转移。因此,要避免切机方案过切电源,每轮切机量不宜过大;优先切除直流近端配套电源,减小功率转移;在优先切除风电机组的原则下,根据风机频率保护定值分轮次逐步减小不平衡功率。
本文研究多直流送出的送端电网频率控制问题。协同考虑风电机组高频保护定值及线路功率变化情况,提出一种送端电网高频切机方案整定方法,并将其分解为首轮单次切机总量子模型和分轮次切机量优化子模型,综合应用线性插值法和摄动法求解切机量。为进一步将各轮次切机量分配至机组,结合机组与直流落点电气距离和机组出力,采用贪婪算法求解背包问题模型来优化切机组合方案。
1 高频切机量优化模型
1.1 问题分析
发电机组配有辅助设备,频率和电压偏移会影响这些辅助设备运行。本文主要考虑频率变化的影响,切除机组有功功率时同步切除了机组无功功率,不考虑电压变化对辅助设备和系统频率的影响。高频切机作为连锁切机拒动的后备控制措施,其控制不当将导致频率升高引起汽轮机汽门反复开闭,所以高频切机动作频率应小于OPC 动作频率。另一方面,直流闭锁会导致送端电网潮流状态发生大幅变化甚至反转[17],为减少直流落点附近线路的潮流变化,应优先切除直流近端配套电源。
直流配套电源除风电机组外,还配有常规机组。在常规机组中,水轮机利用水流重力势能,成本较低。当风机切机量不足时,优先选择切除水电机组。因此,高频切机顺序为风电机组、水电机组、火电机组。相关企业、行业标准和文献中给出风电机组运行的耐受频率为51.0 Hz 或51.5 Hz[18-21]。结合系统实际运行可知,风电场运行时多采用相同的高频保护定值。若按高频保护定值切除风电机组,风电机组会大规模脱网而导致过切[22]。若系统内风电占比较大能满足切机需求时,系统暂态最大频率约束整定为风机高频保护定值。因此,制定高频切机方案时需确保风电机组有序切除,逐步减小不平衡功率。
目前,越来越多的风电机组开始参与系统频率调节,其调频特性与常规同步机组相比有较大差异。为充分利用风电机组的调频能力,切机方案整定时优先选择切除无调频能力或调频能力较弱的风电机组,使调频能力较强的风电机组持续参与频率调节。电力系统运行方式复杂多变,高频切机方案需适应不同运行方式和功率扰动。本文在送端电网直流送出功率最大且负荷最小的极端运行方式下,整定高频切机方案各轮次切机量和切机机组,在不同运行方式和故障场景下对高频切机方案进行校核。
1.2 整定模型
假设送端系统高频切机方案构成n 个三元表:[fcr,1,Δtcr,1,ΔP1],[fcr,2,Δtcr,2,ΔP2],…,[fcr,n,Δtcr,n,ΔPn]。其中n 为高频切机动作轮次,fcr,i为第i 轮动作频率阈值,Δtcr,i为第i 轮动作延时,ΔPi为第i 轮切机量。整定方案S={ΔP1,ΔP2,…,ΔPn}在直流闭锁引起的任一有功功率扰动Pdist,dc下,能有效抑制系统频率升高并满足电网运行要求,且实际动作轮次的总切机量小于对应扰动量。以高频切机方案分轮次整定总切机量F 最小为目标,目标函数和约束条件如下。其中:式(2)表示系统稳态频率在允许范围内;式(3)和式(4)分别表示系统暂态频率最小值不引起低频减载动作,最大值不引起OPC 动作;式(5)表示高频切机方案末轮动作频率阈值小于OPC频率定值;式(6)表示前k 轮的切机总量小于第k 轮整定时所适应的功率扰动。

式中:f∞为系统稳态频率;f∞,min和f∞,max分别为稳态频率的下限和上限;fmin和fmax分别为系统暂态频率偏移的最小值和最大值;fUFLS,set1为低频减载第1 轮动作频率阈值;fOPC,set为OPC 频率定值;fcr,n为高频切机方案末轮动作频率阈值;Pdist,cr,k为方案第k 轮整定时适应的功率扰动量。
1.3 模型分解
由于约束条件与高频切机方案整定模型的关系无法显式表达且非线性,求解过程复杂,难以用数学规划方法求解。为简化求解,本文将整定模型分为首轮单次切机总量子模型和分轮次切机量优化整定子模型。首轮单次切机总量子模型仅在高频切机首轮设置切机量,其目标函数和约束条件如式(7)所示。在极端运行方式下设置最大功率扰动Pdist,max,求解满足约束条件的切机量ΔPtrip:

分轮次切机量优化整定子模型求解时,首先将直流闭锁故障分为单极闭锁、双极闭锁、三极闭锁或更严重的故障场景。选择预想直流闭锁故障场景,计算同类故障场景下最大功率扰动值并从小到大排序。然后取相邻2 个扰动值的平均值,根据直流闭锁功率扰动值选取与平均值差值最小的实际功率扰动值作为对应轮次整定的功率扰动值,且尽量保证各相邻轮次适应的功率扰动值之间的差值大致相等。由此得到高频切机方案动作轮次n 和各轮次整定时所适应的功率扰动集合Pdist:

式中:Pdist,cr,i为第i 轮切机整定所适应的功率扰动值,且Pdist,cr,n=Pdist,max。
实际工程应用中,高频切机的轮数过多会导致工程实施困难。按式(8)所确定的切机轮次如较多,可将扰动集合中功率差较小的功率扰动值合并,以减少切机动作轮次。一般将高频切机轮次设置为3~5 轮。分轮次切机量优化模型目标函数及约束条件如式(9)至式(12)所示,在前i-1 轮已整定的基础上,求解第i 轮的切机量。其中,式(10)表示第i轮切机量整定时,暂态频率大于本轮次动作频率阈值,小于下一轮动作频率阈值;式(11)表示在整定第i 轮切机量时,动作轮次的切机总量需小于第i 轮整定时对应的功率扰动值;式(12)表明第1 轮切机量小于对应功率扰动值和Pdc,sin,min两者中的最小值,防止极端运行方式下出现过切的情况。

式中:fmax,i为第i 轮切机整定时系统暂态频率偏移最大值;Pdc,sin,min为系统最大直流功率送出情况下直流单极闭锁最小过剩功率。
上述模型考虑频率偏移约束条件求解时,均基于暂态频率偏移安全(transient frequency deviation security,TFDS)二元表和TFDS 裕度指标[23]。文献[24]定义TFDS 裕度指标η 为:

式中:f0为系统额定频率;fcr为二元表频率阈值;fcr' 是使给定频率响应曲线在[ fcr',tcr]下恰为临界安全的频率阈值,其中tcr为允许偏离时间。即对于给定的频率响应曲线,f 'cr使频率偏离该频率值的时间恰好为tcr。η=0 时是暂态频率临界安全的。
2 各轮次切机量优化求解
2.1 首轮单次切机总量子模型求解
极端运行方式下设置预想事故最大功率扰动Pdist,max。根据约束条件、最大和最小TFDS 二元表[fOPC,set,Δts]和[fUFLS,set1,Δts],Δts为允许偏离频率值时间,利用平均系统频率模型[25]求解首轮单次切机总量最小值ΔPtrip,min和最大值ΔPtrip,max,然后,取平均值作为首轮单次切机总量初值ΔPtrip,init,即

利用线性插值法求取切机总量,首先求解得出TFDS 裕度指标η=0 时的切机量P3,即

式中:Pi,init,1和Pi,init,2分别为线性差值法求解第i 轮切机量的第1 个和第2 个初值;η1和η2为对应初值的TFDS 裕度指标值。
然后,将P3代入计算对应切机量的TFDS 裕度指标η3,选取η 绝对值最小的2 个TFDS 裕度指标对应的切机量,重新赋值给Pi,init,1和Pi,init,2,作为下一次计算的初值。由于线性插值法在逼近η=0 时收敛速度减慢,此时可利用数值摄动法,在线性插值法求解的基础上快速求解η=0 时的切机量。设置摄动值第I 次迭代后的TFDS 裕度指标灵敏度为:

式中:aI为切机量变化τI时η 变化的灵敏度;η(ΔP(I))为切机量等于ΔP(I)时的TFDS 裕度指标值;η(ΔP(I),τI)为在ΔP(I)基础上增加摄动量τI后的TFDS 裕度指标。
接着,根据灵敏度aI求解出令η(ΔP(I+1))=0 的切机变化量,即

式中:Δp(I+1)为第I+1 次求解的令η(ΔP(I+1))=0 的切机变化量。求解得出切机量ΔP(I+1)为:

设置收敛判据ε,将ΔP(I+1)代入计算η(ΔP(I+1)),并判断η(ΔP(I+1))是否满足收敛条件,若不满足,则返回式(17)重新计算,直到满足收敛条件式(20)。

2.2 分轮次切机量优化整定子模型求解
电网对频率偏移有相关要求和规定,根据现场运行经验,在频率允许偏差的基础上考虑一定裕度后,可确定高频切机方案第1 轮动作频率阈值fcr,1。由于末轮动作后频率会继续上升,因此,末轮动作频率与fOPC,set间也需要留有一定裕度,结合约束条件(式(5))可以得到高频切机末轮动作频率阈值fcr,n。根据首轮和末轮高频切机动作频率值及高频切机轮次,频率间隔值Δfcr为:

将2.1 节计算出高频切机方案的ΔPtrip,init平均分配到高频方案各轮次,为分轮次切机量优化整定子模型提供初值。每轮次切机量初值Pi,init为:

在极端运行方式下选取第i 轮整定对应的扰动功率,利用分轮次切机量优化整定子模型求解每轮切机量。假定前i-1 轮已整定的切机量分别为ΔP1,ΔP2,…,ΔPi-1,在此基础上以Pi,init为第i 轮切机量初值,即为式(23)中的Pi,init,1,然后计算对应的η1。
若η1<0,计算相邻2 轮切机整定对应的扰动功率之差与对应轮次切机量初值之差的绝对值,作为选取线性插值法另一个初值的变化量,即

利用式(16)求出切机量P3,计算其对应的TFDS 裕度指标η3,然后选取下一次计算的初值。循环迭代求解时,若第I 次计算P3对应的裕度指标η=0 收敛速度较慢,可采用摄动法求解切机量。设置摄动量τI,求解增加τI后的η(ΔP(I),τI),然后利用灵敏度aI和TFDS 裕度指标η(ΔP(I))求得Δp(I+1),最后得到满足式(20)的ΔP(I+1)作为第i 轮的切机量ΔPi:

由于求解分轮次切机量优化子模型与首轮单次切机总量子模型的假设不同,因此,根据2 个子模型求解出的切机总量略有差异。
3 各轮次机组分配方法
3.1 机组分配模型
电力系统节点i,j 之间的电气距离定义为2 个节点之间的等值阻抗Zij,eq,数值上等于从节点i 注入单位电流后节点i 与j 之间的电压Uij。根据叠加原理,Zij,eq=Zii+Zjj-Zji-Zij,其中Zii和Zjj表示节点自阻抗,Zij和Zji表示节点i 与j 之间的互阻抗。按电气距离选择机组可能使部分火电机组优先被切除,因此切机分为风电机组和常规机组2 个序列。以第r个直流落点为中心,按机组电气距离从小到大排序得到初始序列Zr,如式(27)所示。

式中:Zr,eq,wN和Zr,eq,M分别表示风电机组和常规机组序列,其中N 为风电机组数量,M 为常规机组数量,一般排列在前的是直流配套电源机组。
根据序列Zr,分析序列中机组全年出力情况,选出出力加和满足约束条件的机组组合。假定第i 轮次切机时,将m 台机组分配至第r 个直流落点,机组在电力资源丰富的时间段内每小时出力之和与每轮次切机量的均方差σ 如式(28)所示。

式中:PGj,Zri为第i 轮第r 个直流落点附近所选第j 台机组出力;t 为小时时间;T 为全年小时数;ΔPdr,i为第r 个直流落点附近在第i 轮的切机量。
第r 个直流落点与第i 轮切机所选的第j 台机组间的等值阻抗为Zri,eq,j,第r 个直流落点第i 轮对应m台机组的电气距离之和如式(29)所示。

选择σ 最小时,对应机组可能离直流落点较远,而选择ZΣ最小时均方差可能较大,为选择合适机组,设目标函数和约束条件如式(30)至式(34)所示。切除直流落点附近电源可减少近端区域过剩功率,若集中在同一直流落点切机,可能导致线路功率大幅变化,因此,按式(32)对每个直流落点的切机量进行分配。由于切除机组在T 时间内出力之和曲线会在整定切机量附近波动,因此每轮切机可留有切机裕度α。

式中:k 为系统直流落点数目;Pr,plan为第r 条直流容量。
确定第i 轮切除的机组后,需确保选择第i+1轮切机机组时机组不会被重复选择,且直流落点附近线路的有功功率Pline需满足式(35)。

式中:Pmax为线路最大输送容量。
若直流落点附近所选机组的功率之和与切机量差别较大,根据各落点机组实际出力之和是否满足本轮次切机量选择机组,尽可能使各直流落点的切机量满足式(32)。为防止整个电厂切除对系统稳定造成影响,一个电厂中至少有一台机组不被切除。
直流闭锁故障发生时,可能会导致部分机组出现电压或功角失稳,故障发生后应优先切除这些机组以维持系统稳定。因此在高频切机方案整定时,需考虑这些机组切除对送端电网过剩功率的平抑作用,然后在此基础上对方案进行整定。
3.2 分配模型的求解
每个直流落点有M 台机组可供选择,求解M 台机组的一个子集,使得子集中机组功率满足约束条件(式(33)、式(34)),故将该问题看成是背包问题的组合优化。根据上述问题描述,将其机组选择模拟为目标函数和约束条件,如式(36)至式(39)所示。

式中:xq为第q 台机组状态;wq为机组平均功率;Vq为机组单位电气距离功率;Zq为机组与直流落点间的等值阻抗;W 为切机总量。
利用贪婪算法搜索NGS组满足约束条件的解,并对每组解的机组等效阻抗求和。然后利用式(30)分析得到NGS组解中使目标函数最小的方案作为直流落点附近第i 轮被切机组,贪婪算法流程见图1。

图1 基于贪婪算法的切机方案搜索流程图Fig.1 Searching flow chart of generator tripping scheme based on greedy algorithm
4 仿真算例分析
4.1 算例系统
以中国某风电占比约为10%的送端电网为例,电网中风电机组频率保护值为51.0 Hz。该电网通过3 回直流与其他电网异步互联,外送功率为21.6 GW,占本区域电网平均负荷的60%,电网局部地理接线图如图2 所示。图中红色实线表示在极端运行方式下发生极端直流闭锁故障后功率变化较大或潮流反转的线路,节点5 和节点2 的风电场群属于直流落点1 附近的机组。
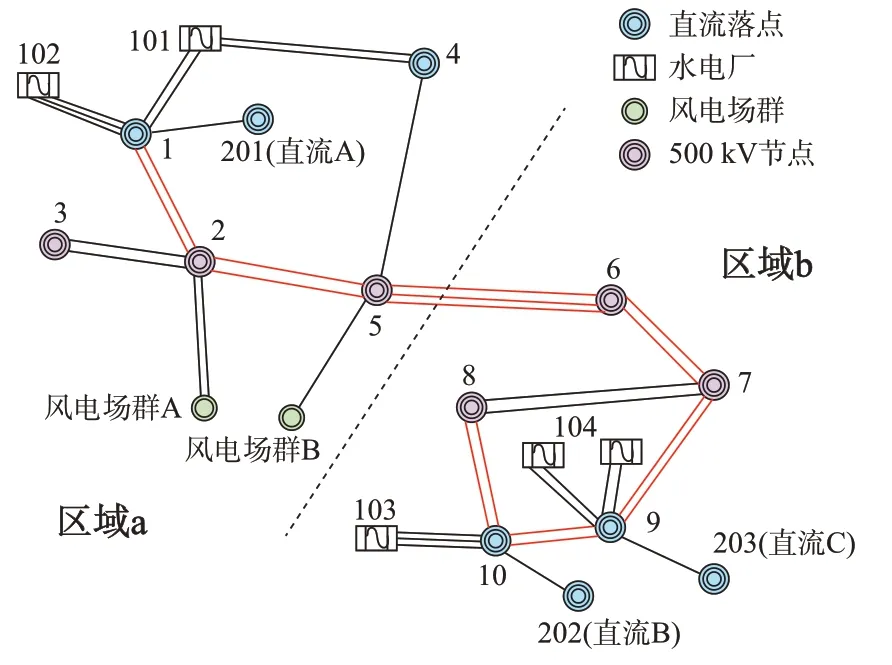
图2 系统局部地理接线图Fig.2 Geographic wiring diagram of partial system
表1 给出了直流单极闭锁和双极闭锁时,在丰平和丰小2 种典型运行方式下系统的最高频率和最低频率。由表1 可知,丰小方式下直流双极闭锁将导致系统频率超出OPC 定值,若不采取高频切机控制,可能导致风机保护动作进而引起系统出现过切的情况。本文在最大功率送出最小负荷的丰极小运行方式下对算例系统高频切机方案进行整定,极端故障场景为一条直流单极闭锁和一条直流双极闭锁同时发生,最大功率扰动Pdist,max=11 600 MW。

表1 直流闭锁功率扰动下的系统频率响应特性Table 1 System frequency response characteristics under DC blocking power disturbances
4.2 高频切机方案整定
高频切机方案的各边界约束条件限值分别为:f∞,min=50.0 Hz,f∞,max=50.2 Hz,fUFLS,set1=49.25 Hz,fOPC,set=51.5 Hz,n=5,Δtcr=0.2 s。系统对频率偏差要求为±0.5 Hz,考虑一定裕度可得到首轮动作频率阈值。然后考虑动作轮次和fOPC,set的值,末轮动作频率阈值fcr,n与fOPC,set之间也留有一定裕度。因此,确定首轮和末轮切机动作频率阈值分别为fcr,1=50.6 Hz 和fcr,n=51.4 Hz,各轮次间隔值为0.2 Hz。
在丰极小运行方式和极端故障场景下,首先求得首轮单次切机总量范围为7 880~11 600 MW,然后计算切机总量初始值为9 740 MW 和各轮次切机量初值。根据每轮次整定对应的扰动功率和初始切机量,利用各轮次切机量优化模型精确计算各轮次的切机量,求解得出的高频切机方案如表2 所示。

表2 高频切机方案Table 2 Over-frequency generator tripping scheme
由于算例系统中风机占比不高,所有风电机组分配在前3 轮高频切机轮次中。在频率达到风机高频保护定值时,高频切机方案已动作切除全部风机。在极端运行方式和部分故障场景下,动作3 轮不足以抑制系统频率继续升高,因此,后续动作轮次切除机组为常规机组。表3 所示为各直流落点与附近各机组间的等值阻抗,通过分析机组出力发现,直流落点附近的机组出力能满足切机量需求,同时给出了第1 轮切机时各直流落点机组出力与切机量的均方差。表4 所示为每个直流落点的机组切除数量。由于风机容量无法满足切机量需求,因此需切除部分常规机组。
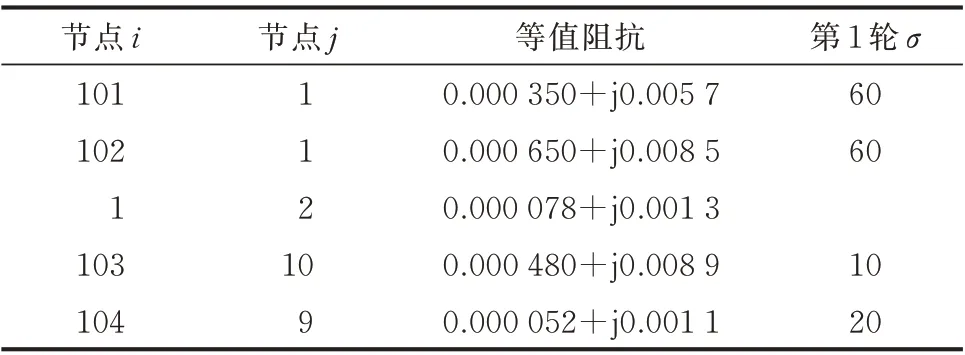
表3 节点间电气距离Table 3 Electrical distance between nodes

表4 各轮次实际切机机组数量Table 4 Actual generator tripping numbers in each round
4.3 方案对比分析
根据文献[16]提出的“最小欠切原则”整定切机方案时,在满足稳态频率约束的前提下,得到系统参考过剩功率为2 100 MW。因此,整定的高频切机方案每轮切机量为:1 900,2 400,1 600,2 000,1 600 MW。在丰极小运行方式下发生直流B 双极闭锁故障(场景B2),2 种方法整定的高频切机方案的频率响应曲线如图3 所示。

图3 系统频率响应Fig.3 System frequency response
利用文献[16]所提整定方法得到的高频切机方案,在丰极小运行方式下,暂态最大频率为51.22 Hz,高频切机动作4 轮,切机量为7 900 MW。本文所提高频切机方案动作3 轮,暂态最大频率为51.13 Hz,切机量为6 677.5 MW。文献方案相比于本文整定方案多动作1 轮次,切机量增加1 222.5 MW,系统暂态最高频率增加、暂态最低频率降低。
4.4 高频切机方案适应性分析
丰极小运行方式下,对高频方案在不同预想直流故障下的适应性进行仿真分析,结果如表5所示。
所提方案在丰平和丰小运行方式下,发生极端直流闭锁场景B2+A1 时系统的频率响应如图4 所示。由图中可以看出,方案在极端直流闭锁故障下具有较好的适应性。

表5 不同直流故障组合仿真结果Table 5 Simulation results with different combinations of DC blocking faults

图4 不同运行方式下的系统频率响应Fig.4 System frequency response in different operation modes
电力系统是一个强非线性系统,故障场景多且运行方式多变。本文虽对典型运行方式和不同故障场景下高频切机方案的适应性进行了校核,但高频切机方案仍可能不适应某些低概率的特殊运行方式和故障组合。对于此类问题,可在已整定的高频切机方案基础上进一步优化,以提高方案的适应性。
5 结语
本文考虑了风机高频保护定值及线路功率变化,提出了一种送端电网高频切机方案整定模型。将模型分解成首轮单次切机总量子模型和分轮次切机量优化整定子模型,降低了模型求解的复杂度。综合应用线性插值法和摄动法快速求解各轮次切机量。结合机组与直流落点间的电气距离和机组出力之和,采用背包问题模型优化了各轮次切机组合,将切机量与机组对应。算例分析表明,所提高频切机方案在不同直流闭锁故障和运行方式下能有效抑制系统暂态频率升高,具有良好的适应性。
直流闭锁时,部分机组可能会由于电压或功角的动态过程发生失稳,对高频切机方案的适应性产生影响。在后续研究中将进一步考虑失稳机组和高频切机之间的协调控制,并对动作轮次、动作阈值、切机量等进一步优化。
本文得到山东大学青年学者未来计划(2018WLJH31)的资助,谨此致谢!
猜你喜欢
空间科学学报(2021年6期)2021-03-09
石材(2020年7期)2020-08-24
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
太空探索(2016年12期)2016-07-18
新闻传播(2016年4期)2016-07-18
公民与法治(2016年10期)2016-05-17
风能(2016年12期)2016-02-25
电网与清洁能源(2015年5期)2015-12-29