
单矢量水听器水声材料声反射系数自由场测量
2021-05-08 01:29时胜国王超胡博
哈尔滨工程大学学报 2021年4期
时胜国,王超,胡博
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全重点实验室(哈尔滨工程大学) 工业和信息化部,黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
水声材料在水声工程中应用十分广泛[1]。声反射系数是表征水声材料声学性能的重要参数之一,有效测量获取材料的声反射系数可对其实际应用与研发提供依据。与常规的小样声管测量方法[2-4]不同,自由场测量方法可有效获得大样品试样斜入射时的声反射系数,因此开展水声材料大样测量方法研究更能满足实际工程需要。声学材料自由场大样测量一般在大型消声水池中进行,为了抑制试样边缘衍射效应,水听器应尽量靠近试样表面[5],但此时直达声与反射声发生混叠,不易分离。另外,受限于消声水池消声下限,低频段多径效应明显,从而引入测量误差。学者开展了大量的研究工作,李水等[6]提出的宽带脉冲叠加法。该方法采用逆滤波技术对声源激励信号进行预处理,使水听器处的接收信号近似为理想的宽带窄脉冲,采用21个纵向复合振子组成的平面基阵发射测试信号,利用发射阵的高指向性抑制试样的边缘衍射效应,有效降低了测量的下限频率。但该方法需要信号二次发射,即对有、无试样进行分别测试,通过二者相减实现直达声与反射声的有效分离,进而计算材料的声反射系数。Kazunori等[7]提出了基于信号处理技术的材料吸声系数测量方法,该方法将扩展脉冲作为发射信号形式,充分利用了扩展脉冲声的自相关特性,在时域上剔除干扰声信号,再将含试样的反射声与标准刚性反射表面的反射信号进行对比,进而实现了声吸收系数的宽带测试。除此之外,国内外学者也将参量阵应用于材料的声学参数测试中,充分利用参量阵的高指向性抑制试样边缘衍射效应,但在低频段,分离直达声与反射声仍然需要二次测试[8-9]。近年来,矢量传感器已经成功应用于空气声学材料声学参数测量中[10-12]。矢量水听器由传统的声压水听器与质点振速水听器复合而成[13],可同步、共点地获取声场中的声压与质点振速信息,拓展了信号处理空间,给水声材料声反射系数测试带来了新的思路。
本文提出了基于单矢量水听器的水声材料声反射系数自由场大样测量方法,该方法将单矢量水听器看作三元接收阵,结合后置逆滤波技术与脉冲声发射技术,在时域上剔除试样边缘衍射声等干扰信号,规避其干扰;在测量系统空间位置参数信息已知的情况下,充分利用单矢量水听器的接收信号模型特点,将声反射系数的测量归结为经典的求解非正定线性方程组问题,重构直达声与反射声,进而将二者相除获取试样的声反射系数。
1 声反射系数测量原理
1.1 测量系统辨识与后置逆滤波器设计
后置逆滤波器已经成功应用于声管中的水声材料声反射系数测量中[14]。后置逆滤波器的设计是建立在测量系统传递函数已知的情况下,因此应首先对测量系统进行辨识。矢量水听器包含声压通道与质点振速通道,测量系统包括信号发射系统与信号接收系统。声源激励信号经发射换能器辐射到水介质中,经水声信道传播后由信号接收系统进行采集分析。输出信号y(n)为:
y(n)=x(n)⊗h(n)+N(n)
(1)
式中:N(n)为加性背景噪声;x(n)为声源激励信号;h(n)为测量系统单位冲激响应函数;⊗为卷积。为了抑制测量系统带来的信号失真,本文用MLS序列对测量系统进行辨识[15]。设测量系统输入信号x(n)为MLS序列,计算系统的输入信号与输出信号的相关函数:
rxy(n)=h(n)⊗rxx(n)
(2)
式中:rxy(n)为测量系统输入信号与输出信号的互相关函数;rxx(n)为输入信号的自相关函数。对于MLS来说,rxx(n)为:
(3)
式中:L为MLS序列长度,L=2m-1;m为MLS序列的阶数;δ(n)为单位抽样函数。则rxy(n)可进一步计算为:
(4)
一般情况下,L是一个极大值,则有:
(5)

(6)

1.2 声反射系数测量方法
水声材料声反射系数自由场测量模型示意图如图1所示。
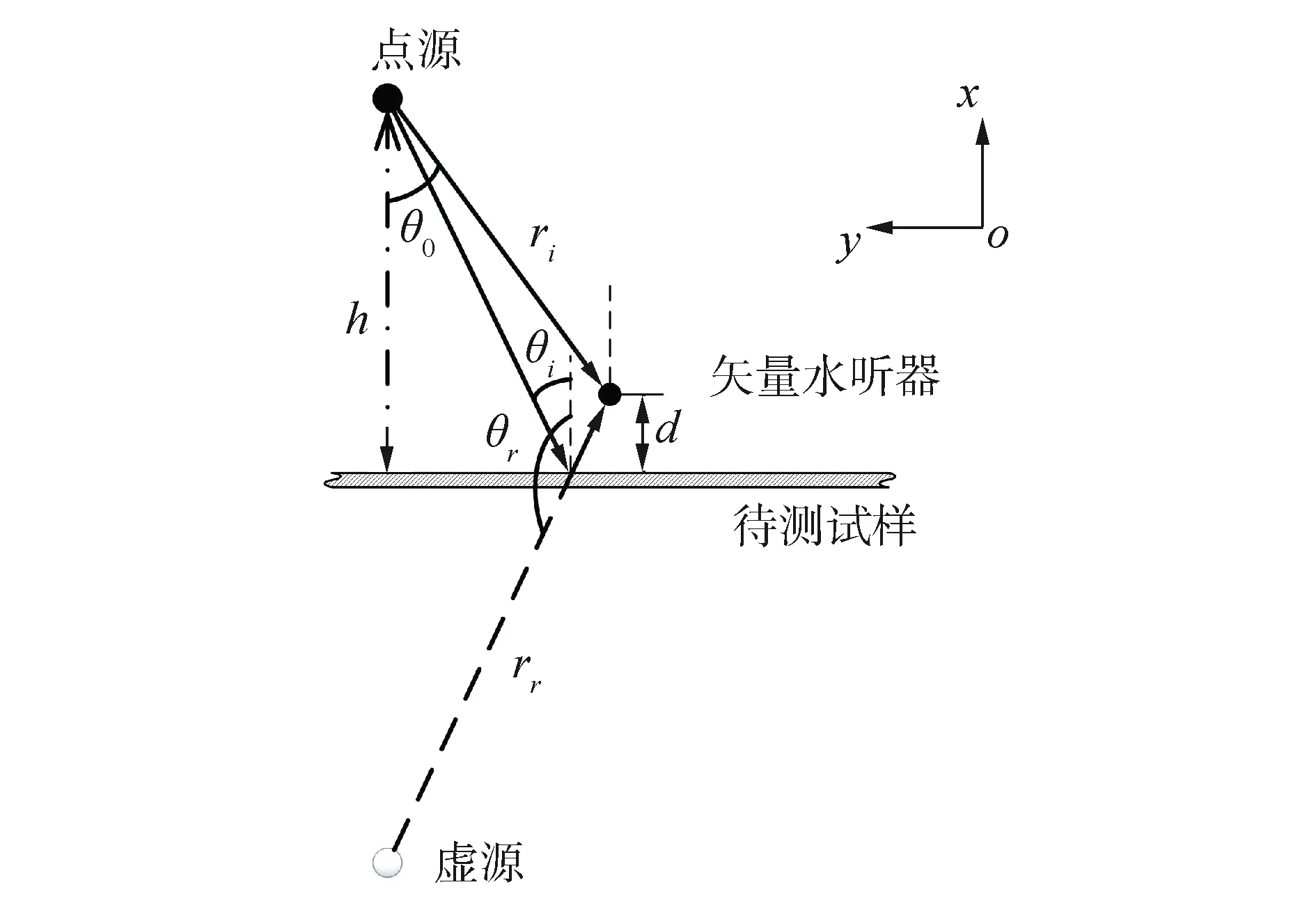
注:ri为直达声声程;rr为反射声声程;h为声源到试样表面的距离;d为矢量水听器到试样表面的距离;θi为直达声入射角度;θr为反射声入射角度。图1 测量模型Fig.1 Schematic diagram of the measurement
设待测试样无限大,且不考虑水池边界反射声。若矢量水听器到试样表面的距离d很小,并且h≫d时,θ0≈θi。不失一般性,此时二维矢量水听器接收信号为:
(7)
式中:s(t)为声源发射信号;R为材料试样的声反射系数;τr为直达声与反射声的时延;np(t)、nx(t)和ny(t)分别表示矢量水听器3个通道的加性背景噪声。若声源到试样距离较远,矢量水听器到试样表面距离很近,可忽略时延小量τr。将二维矢量水听器看作导向矢量为a=[1 cosθsinθ]T的三元接收阵,则矢量水听器接收信号可写为:
X=AS(t)+N(t)=
(8)

(9)
(10)

(11)

(12)

2 声反射系数测量仿真分析
本节仿真中,若无特殊说明,待测试样参数为:密度ρ=2 700 kg/m3,其中声速为c=6 360 m/s,厚度为0.006 m。水的密度为ρw=1 000 kg/m3,水中声速为cw=1 500 m/s。
2.1 验证测量模型
仿真条件1:在理想条件下,设待测试样为无限大,发射信号为脉冲宽度为0.25 ms的巴特沃兹脉冲声声信号,其频带宽度为0.5~10 kHz。声源到试样表面距离H=5 m,矢量水听器到试样距离d=5 cm,声波按照球面波规律扩展,设声波入射角度分别为30°,信噪比SNR=30 dB。图2给出了上述仿真条件下的测试结果。由图可知,在理想条件下,测量结果与理论值吻合较好,证明了本方法测量理论的正确性。在实际测试中,试样边缘衍射效应与水池边界反射声会对测试带来不利影响。针对这一问题,本文将脉冲声发射技术与后置逆滤波技术引入到测试中,在时域上剔除干扰声,提高测量精度。

图2 斜入射声反射系数测量结果Fig.2 Measurement result of the acoustic reflection coefficient with an oblique incident angle
仿真条件2:上述仿真条件不变,令待测试样几何尺寸为1 m×1 m×0.006 m,且令水池边界反射系数Rq=1,测量系统的传递函数用中心频率为1、2、4和8 kHz的高斯脉冲声模拟。考核本文所述测量方法的有效性。
图3给出了不同入射角度的测试结果。由图3可知,逆滤波补偿前信号波形失真严重,干扰声与可用信号几乎无法直接分辨;经后置逆滤波器补偿后信号波形规整,干扰声与直达声、反射声在时域上是分离的,因此可通过窗函数提取可用信号。由图4所示的测量结果可知:当声波入射角度较小时,测试结果与理论值吻合较好,而当声波入射角度为60°时测试失效。这是由于声波入射角度较大时,试样边缘衍射声与可用信号发生混叠的影响。
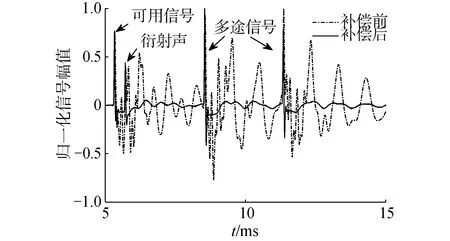
图3 逆滤波器补偿前后的声信号Fig.3 The acoustic signals before and after postprocessing inverse filter compensation

图4 不同声波角度入射测量结果Fig.4 Measurement results at different incident angles
2.2 测量误差分析
由于式(8)所示方程组存在不适定性,因此需考虑求解精度对测试结果的影响。矩阵A通过测量声源到试样距离H、矢量水听器到试样距离d、声波入射角度θi计算得到,因此矩阵A中必然存在误差;另外,观测数据中也必然存在背景噪声,上述不确定性因素均会干扰方程组的准确求解,进而影响声反射系数的测量精度。为此,本文将对上述误差对测试结果的影响进行分析。


图5 测量方差Fig.5 Variance of this measurement
3 声反射系数测量试验研究与数据处理
实验测量系统包括信号发射系统与信号采集分析系统。其中信号发射系统由任意信号发生器、功率放大器与发射换能器等组成;信号采集分析系统包括二维矢量水听器、数据接收采集器、电脑等。待测试样为1 m×1 m×0.006 m的铝板。测量时,发射换能器、二维矢量水听器与铝板等深布放于25 m×15 m×10 m的消声水池中深5 m处。矢量水听器到试样距离为5 cm,声源到试样距离为5 m。待测试样安置于升降回转装置上,可实现多角度测试。测量系统示意图如图6所示。

图6 测量系统Fig.6 Schematic diagram of the test system
在进行声反射系数测量之前,应先辨识测量系统的传递函数。吊起试样,发射16阶MLS序列辨识测量系统,并设计后置逆滤波器。
图7给出了声波入射角度为30°时测量系统辨识结果与后置逆滤波器的设计结果。图中Hp(f)、Hx(f)与Hy(f)为测量系统3个通道的辨识结果,Hpinv(f)、Hxinv(f)与Hyinv(f)为相应通道的后置逆滤波器。在获取了后置逆滤波器以后,放下待测试样,发射频带宽度为0.5~10 kHz、脉冲宽度为0.2 ms的巴特沃兹脉冲声。在获得观测数据之后,首先用后置逆滤波器对数据进行补偿。以声波30°入射时的声压通道信号为例,验证后置逆滤波技术的有效性。

图7 测量系统传递函数辨识与逆滤波设计结果Fig.7 Results of test system identification and post processing inverse filter designing
由图8可知,后置逆滤波补偿后信号可明显地观察到试样边缘衍射声;随后加时间窗截取有用信号,并将截取后数据进行傅里叶变换,求解声反射系数。
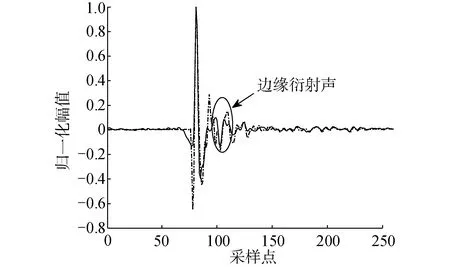
图8 信号补偿效果Fig.8 Signals before and after postprocessing inverse filter
图8给出了声波入射角度为0°与30°时声反射系数测量结果。由图9可知,声反射系数测量结果在4 kHz以上与理论值吻合较好,在低频段测量结果失效。测量中声源的声源级曲线如图10(a)所示。由图可见发射换能器低频段信号发射能力有限,声源级较低,这使得该频段测量系统辨识与声反射系数测试中矢量水听器接收信号的信噪比较低,因此测量误差较大。声压信号的幅度谱和背景噪声谱如图10(b)所示。由图可知,测量频率高于4 kHz时声压通道的幅度谱级高于背景噪声谱级15~20 dB左右,而测量频率在4 kHz以下时虽然声压信号幅度谱级高于背景噪声的谱级大约5~10 dB,由此可以推知本文所述的测量方法信噪比不应低于15 dB才能得到较好的测量结果。

图9 试验数据处理结果Fig.9 The measurement results of experiment data

图10 测试中声源的声源级和声压通道幅度谱Fig.10 Sound source level of the transducer used in the measurement and the amplitude spectrum of the sound pressure signal
4 结论
1)本文所述方法可有效实现斜入射条件下的声反射系数宽带测量。
2)相较于观测数据向量X中随机误差,阵列流型矩阵A中的误差更易引起测量结果偏差,因此在测量时应注意控制声波入射角度、直达声声程和反射声声程的测量准确性。
3)受限于发射换能器低频信号发射能力,实验测试中低频测量失效。
猜你喜欢
电声技术(2022年3期)2022-04-28
无损检测(2022年1期)2022-03-16
系统工程与电子技术(2022年3期)2022-03-11
科学技术与工程(2021年28期)2021-10-20
少儿美术·书法版(2021年8期)2021-10-20
能源工程(2021年2期)2021-07-21
舰船电子工程(2020年9期)2020-10-30
疯狂英语·新悦读(2020年3期)2020-06-17
无线互联科技(2017年3期)2017-04-21
舰船电子工程(2017年3期)2017-04-07
