风电场无人机巡检风力叶片姿态辅助监测系统设计
2021-05-21 08:42龙源电力集团股份有限公司宁夏公司艾进才
电子世界 2021年8期
龙源电力集团股份有限公司宁夏公司 艾进才
随着新能源技术的不断发展,风力发电的价值越来越受到人们的关注,因此在发电产业中,风力发电逐步得到了重视,随之扩大了风力发电的规模,所以对风力发电相关设备的巡检具有重要意义,目前主要的巡检方式是人工巡检,这种方式存在实时性低、效率低下等问题。于是基于无人机技术的巡检方式逐渐在电力行业崭露头角。然而,利用无人机进行风力发电机设备巡检时,一般需要复杂算法对处于停机状态的风力叶片进行姿态检测,以便于后续的图像采集和算法处理。本文提出一种基于嵌入式的风力叶片姿态辅助监测系统,可实时检测风力叶片姿态,并将测得的数据通过无线网络回传至无人机控制中心,指导无人机进行风力叶片图像采集,大大降低系统算法难度。
当今社会,经济和科技迅速发展,它给人们的生活带来翻天覆地的变化,与此同时,环境问题也亟待解决。风能作为一种新的清洁能源,人们对其的关注度越来越高,它不仅对地球生态环境友好,而且能够在发电产业中作为能源被开发利用,因此在我国风电产业的应用相当广泛。目前,对风机叶片的故障检测主要由人工完成,工作人员利用相关设备对其进行检查和维修,如望远镜、绳索、升降机,如图1所示。人工检测往往缺乏一定的准确性同时也存在一定的风险,目前无人机技术越来越成熟,在巡检领域,人们对多旋翼无人机的研究成果颇丰,随着相关学者与专家对无人机技术的不断研究与探索,在无人机巡检的技术上研究出了在自主巡检技术。风电场无人机巡检主要分为两种,即宏观巡检和微观巡检。宏观巡检是指无人机按照制定的飞行路径,通过无人机操作员或者自主飞行至风场上空,进行宏观的图像采集,进而检测风力发电机叶片断裂、风塔倒塌等严重故障。这类巡检方式效率高,覆盖范围广。微观巡检是指操作无人机对风塔进行近距离视频成像,主要采集风力叶片的细节特征,例如叶片裂纹、结冰,涂层剥离等细微故障。但该种巡检需要对风力叶片在停机状态时的指向、姿态进行视觉算法的解析,无人机在成像过程中,需要对风力叶片的图像进行拼接,系统的复杂程度较高。本文提出的风电场无人机巡检风力叶片姿态辅助监测,主要是利用嵌入式硬件,搭载姿态检测单元,检测风力叶片的停机姿态,并最终通过无线通信终端,将检测结果发送至无人机解算中心。当无人机飞行至待检测风塔时,依据提前解析的叶片姿态,对叶片进行图像采集。
1 系统
在风力发电机组中,风电机是重要的组成部分,它的主要作用是收集风能,其次进行动能——动能的转换,即将叶片空气流动的动能转换为叶片旋转的动能,使发电机工作而产生电力。随着人们对风电技术的研究不断深入以及对电能需求的不断增多,对风电发电的设备的大小和机组规模有了进一步的增加和扩大。目前,风力发电的叶片长度可达到70m左右,使用寿命为30年左右,为保证风力发电机能够长期稳定、安全正常运行,同时保证发电质量良好,因此风电公司需对风机进行不定期的巡检和维护。据统计调查发现,对风机进行保养和维修时,其故障一方面来源于风机电气系统,另外有相当一部分的故障于风机叶片。由于在偏远郊区、山区和近海区域风能充足且稳定,因此风电场一般都设在这些地方以更好的利用风能,但这些地方的地理环境复杂恶劣,对风机叶片的工作系统不够友好,缺陷故障的发生概率较高,导致风机不能正常工作。
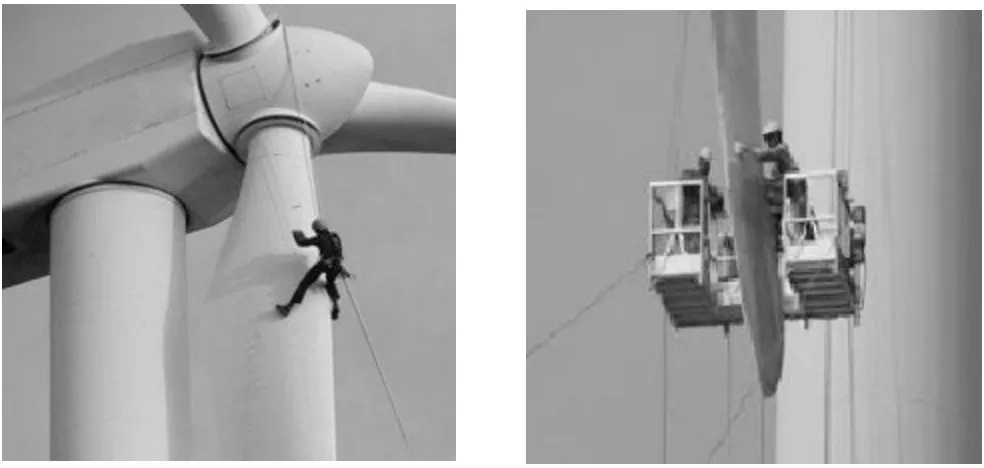
图1 风力发电机叶片检修
在风电场无人机系统中,其中巡检目标定位占据重要位置,它直接影响后续工作的展开。在巡检目标定位过程中,需要确定出相机相关的坐标系,并对其之间进行坐标系转换,通过视觉测量过算法完成对巡检风力叶片位置的确定,算法实现难度较大。本文设计的基于嵌入式的风力叶片姿态检测算法设计,主要分为四大模块:自启动模块、姿态检测模块、姿态角换算模块、无线通信模块。其中自启动模块主要是通过串行接口读取振动传感器数据,依据采集的振幅值判断风机主轴的运转情况。姿态检测模块内部由惯性测量单元、磁传感器等构成,集成卡尔曼滤波算法,提供精确的方向、姿态等角度信息。姿态角换算单元是指:设备初始安装完毕后,需标定叶片指向与姿态传感器数据的换算关系;无线通信模块用于将检测到的姿态信息远传至控制中心,控制中心在收到风力叶片姿态信息时,将有关数据下发至巡检无人机,指导无人机在风塔位置时,沿着叶片方向对叶片本身进行图像采集,大大降低无人机图像采集的算法难度。
本文依据惯性测量单元的方法进行检测,其工作原理为:无人机当前的加速度速率由一个或几个加速度感应器探测得到;其在方向、翻滚角度和倾斜姿态上的变化由一个或几个偏航陀螺仪计算得到。
2 系统硬件设计
本文利用磁吸方式将风力叶片姿态辅助监测装置安装于风力发电机旋转主轴上,并在非旋转部件上设置激光校准零位点。当风力叶片旋转式,该装置亦随之转动,从而获取实时的姿态角度,并通过无线通信单元,将实时姿态数据回传至无人机控制中心。该风力叶片姿态辅助监测系统的中央处理器是STM32,它通常有六个组成部分,分别是IMU姿态传感单元、功耗供能单元、IPS硬屏显示单元、激光校准单元、4G通信单元、FLASH存储模块。通过振动传感器获取当前风机叶片的运行状态,只有当风机处于停机状态时,才进行姿态检测,以延长蓄电池使用寿命。
2.1 中央处理器
中央控制器选用的处理器是STM32,CPU主频350MHz,指令集是32,其外设接口和IO资源相对非常丰富,当需要进行功能的扩展时,是非常便捷的。其主要由三部分电路组成,分别是电源、仿真接口以及通讯接口,在这三部分电路中,电源电路部分一般使用的是芯片,它选用的芯片是TPS70351,它可以输出两种电压,一个是1.8V,一个是3.3V,芯片内核的工作电压是1.8V,外设和IO引脚的工作电压是3.3V。当芯片工作是,会产生相当大的热量影响其正常工作,但是该芯片的散热功能相对完善,保障芯片的温度不超过工作温度,使设备可以正常可靠的运行。
因本装置采用蓄电池供电方案,为了延长该装置的续航时,控制STM32处于低功耗模式,在非巡检时段时,装置处于待机状态,并通过继电器回路控制相关外设处于停机状态;当无人机开启巡检任务时,装置检测到风力叶片处于停机状态,随即开机检测,获取姿态数据。
2.2 IMU姿态传感单元
选取的姿态传感器是基于MEMS技术的,它的测量系统具有高性能的特点,能够测量物体的三维运动姿态。它一般由三个运动部分组成,分别是陀螺仪、加速度计、电子罗盘等,它们都是三轴的,将传感器获得的数据通过在其中嵌入的低功耗ARM处理器进行处理,并通过温度补偿,得到物体的三维姿态与方位等数据。姿态传感器获取的物体三维姿态方位数据通常用四元数、欧拉角表示,这些数据根据基于四元数的三维算法和特殊数据融合技术获得。姿态传感器的已经得到了十分广泛的应用,如:无人机、机器人、机械云台、车辆船舶、地面及水下设备、虚拟现实、人体运动分析等相关产品设备中。本文选用微型姿态传感器,可内嵌于嵌入式主板,实现叶片姿态检测。
2.3 IPS硬屏显示单元
当初次将风电场无人机巡检风力叶片姿态辅助监测系统安装成功后,系统中的原始参数和姿态角可能并不满足现场的实际情况,因此对于其参数应该进行重新设置。一般进行参数设置借助于鼠标和键盘,但是在输煤现场中环境相对恶劣,鼠标和键盘的使用不够方便,因此本系统选用的显示屏支持触控操作,它是IPS电容屏,其与中央处理器的连接借助于USART串行接口,当对其进行二次开发时,由于在其内部部分控制功能的存在,使得中央处理器的负荷降低,因此容易对其进行二次开发。
2.4 振动检测单元
本文在设计时兼具低功耗设计,因此只有在风力叶片处于停机状态时才进行姿态检测,因此利用振动传感器作为风机是否停机的判断依据。振动传感器选用常开高灵敏度震动开关SW-18010P。它有两种工作状态,开路OFF状态和导通ON状态。当开关处于OFF状态时,它处于静止状态,当开关处于ON状态时,往往是外力对于传感器的触碰而达到震动力阈值,或者是传感器检测到物体的移动速度变化而使达到离(偏)心力阈值。当ON状态的作用力消失时,恢复为OFF状态。
2.5 4G通信单元
因风电场地处偏远,采用无线通信方式最为切合实际,本文采用的无线通信模块是基于4G的自组网技术,在该模块中主要集成了两个器件,低功耗射频收发器和微处理器,它们的使用使得在通信过程中的耗能降低,同时保障了通信质量的稳定,在组网过程中还,简单易行,操作方便,因此可实现点对点的数据传输;可组成星型和MESH型的网状网络结构。可在风塔之间实心信号的中继,提高整个无线网络的鲁棒性。
小结:本文设计的基于嵌入式的风电场无人机巡检风力叶片姿态辅助监测系统,集成化程度高,安安装简便,续航持久,可及时采集风力发电叶片在停机状态下的姿态数据,并将该数据发送至巡检无人机,大大降低了无人机对风力叶片的定位难度,为进一步的图像采集以及利用机器视觉实现叶片缺陷检测奠定了基础。
猜你喜欢
防爆电机(2022年1期)2022-02-16
现代仪器与医疗(2021年4期)2021-11-05
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
山东工业技术(2016年15期)2016-12-01
汽车维护与修理(2016年3期)2016-02-28
少先队活动(2014年6期)2015-03-18
汽车与新动力(2014年3期)2014-02-27
少年科学(2014年2期)2014-02-24