靶弹任务规划与虚拟训练技术研究
2021-06-11 03:12曹立飞曹红松刘鹏飞张芝源李金新
测试技术学报 2021年3期
曹立飞,曹红松,刘鹏飞,张芝源,李金新,李 超
(1. 中北大学 机电工程学院,山西 太原 030051; 2. 陆军炮兵防空兵学院郑州校区,河南 郑州 450052;3. 中国人民解放军第3606工厂,山西 侯马 043000)
随着军事智能化的作战样式、 战争形态的加速演变,武器装备的升级换代以及保障技术的创新发展,对传统地面防空作战也提出了更高的要求,并进一步推动了地面防空作战力量机械化、 信息化、 智能化融合发展,新型防空武器装备的训练和试验面临诸多挑战.
当前,靶弹作为特定的战场目标特性模拟器,是考核武器装备战技指标、 验证作战效能、 提高训练水平的重要手段[1,2],战斗力生成能力也直接取决于靶弹技术的发展水平[3,4]. 由于使用靶机等设备作为靶弹进行地空导弹射击操作训练成本居高不下[5],且飞行速度较低致使训练效果差. 基于此,制式火箭弹改造为靶弹是主要发展方向之一. 目前,用于配合地空导弹训练的靶弹主要有: 头部喷射曳光火箭靶弹[6]、 中高空超音速有控火箭靶弹[7]、 TDI-CCD光靶弹[8]等.
由于任务规划需求逐渐增多,同时,随着虚拟现实技术和计算机技术的逐步发展[9],围绕智能化作战环境下的地面防空作战需求,解决实际作战中的薄弱和重点环节成为亟待解决的重要难题. 因此,有必要对传统的训练体系进行补充和完善[10]. 而目前虚拟试验所代表的验证手段日益成熟,其理念和方法也得到初步认可.
本文依照“精确任务支持、 仿真系统验证”的设计思路,开发了一套高速靶弹任务规划系统,并构建了基于VR-Forces的虚拟仿真模块,以训练试验数据为驱动,提供可视化分析与决策,为地面防空日常训练提供辅助决策支持,更好地满足了防空作战训练需求.
1 系统总体方案
1.1 系统方案设计
靶弹任务规划与虚拟仿真系统由4个子系统组成,分别为靶弹弹道及射表计算子系统、 靶弹及导弹任务规划子系统、 数据传输与处理子系统和VR-Forces虚拟仿真子系统. 系统功能模块及功能设计如图1 所示.
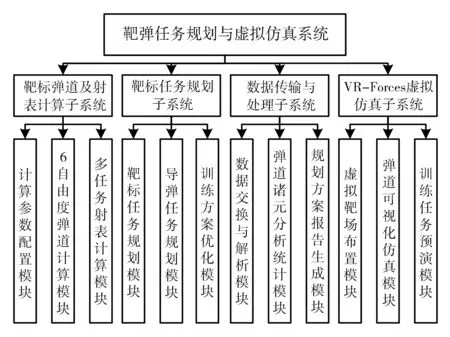
图1 系统整体框架Fig.1 Function design of task planning system
靶弹弹道及射表计算子系统包括计算参数配置模块、 6自由度弹道计算模块和多任务射表计算模块,能够进行靶弹弹道和多任务射表计算.
靶弹任务规划子系统包括靶弹任务规划模块、 导弹任务规划模块和训练方案优化模块,能够基于地形数据对靶弹和导弹发射任务进行方案布置并在地图进行展示.
数据传输与处理子系统包括数据交换与解析模块、 弹道诸元分析统计模块和规划方案报告生成模块,可通过提供的软硬件接口对气象数据和定位定向数据进行解析和管理,同时对弹道计算和方案规划结果进行统计分析和导出.
VR-Forces虚拟仿真子系统基于VR-Forces提供的虚拟视景仿真引擎进行虚拟靶场布置、 弹道可视化仿真和训练任务预演等.
1.2 系统实现流程
系统开发采用自顶向下的设计方法,提出如图2 所示的系统开发方案. 首先,针对靶弹任务规划及仿真需求,明确高速靶弹训练内容; 其次,划分软件模块并确定软件数据接口及协议,采取分模块开发、 按需集成的模式进行软件开发[11]; 最后,进行系统软硬件联调、 软件功能测试及修改.
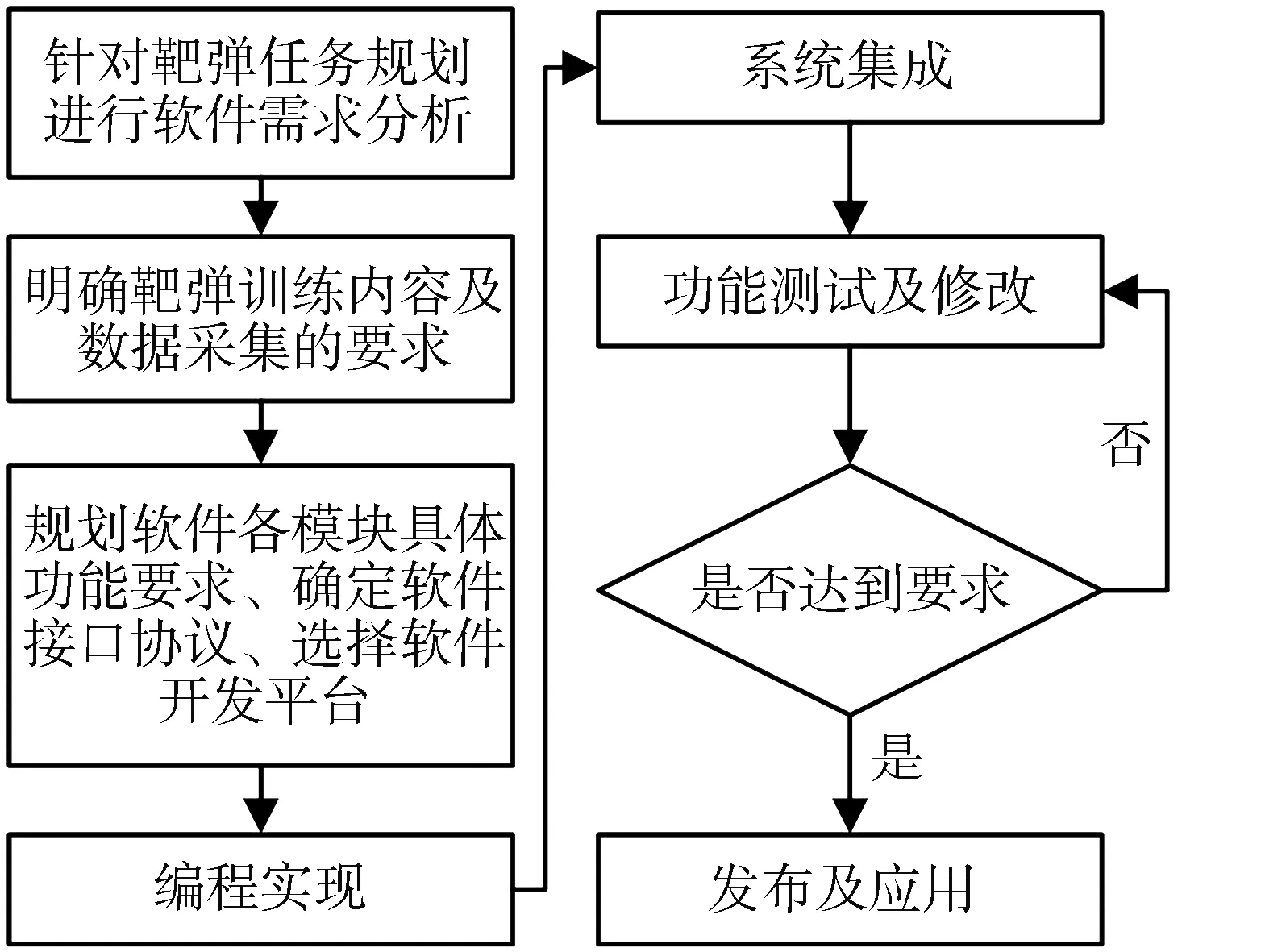
图2 软件开发流程Fig.2 software development process
根据系统主要功能模块,首先,基于Android进行任务规划3个模块的实现,主要通过Android Studio进行界面设计并采用JNI实现安卓平台的弹道计算; 其次,基于OSMDroid实现基于视景地图的任务规划模块; 最后,基于VR-Forces提供的C++ 二次开发接口,实现靶弹虚拟仿真训练.
2 关键技术及实现
2.1 基于Android的弹道及射表计算
在靶弹任务规划系统中,弹道及射表计算是任务规划的核心,改造后的靶弹由于气动特性及结构改变,不能继续使用原有制式火箭弹的成熟射表,需根据供靶要求实地计算发射位置、 方角位和射角等参数,也需要对高速靶弹弹道及射表进行重新计算和规划. 为了方便任务规划使用,本文基于手持式便携Android设备进行弹道计算的设计与实现.
1) 射表快速计算原理
由于射表计算过程中传统迭代法通过射程求解射角速度较慢,为了快速计算靶弹射表,进而求解该射程下对应的弹道诸元和供靶参数,本文采用快速弹道求解方法,同时,通过JNI接口实现弹道和射表的高效计算.
射表快速计算流程如图3 所示,首先,选取输入射程范围中的上下界射程进行相应射角的求解; 然后,通过特征点,求解出对应的射角; 最后,通过最小二乘法拟合出射角与射程对应的曲线方程,通过该曲线方程求解出给定射程范围中其他射程对应的射角.
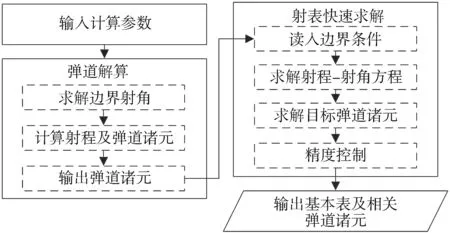
图3 射表快速计算流程
2) 计算模块开发与实现
由于弹道和射表实时计算运算量大、 占用系统资源多,为解决Android平台上Java语言运算速度慢、 效率低的问题,采用Java和C++语言混合编程,通过调用Java Native Interface (JNI)接口实现Java代码和其他语言(C++)的代码交互[12],获取卓越的计算性能. 在Android Studio平台中JNI接口调用通过其提供的Native Development Kit (NDK)原生开发工具包来实现,使用该工具进行开发可有效提高弹道和射表实时计算的速度和效率.
靶弹弹道及射表计算由计算参数配置模块、 6自由度弹道计算模块和多任务射表计算模块3部分组成. 首先将6自由度弹道解算的C++模块和Java结合,通过JNI接口将弹道结果传递到Java应用层; 再将提取的靶弹供靶指标通过SmartTable模块创建的表格进行显示即可完成射表快速计算; 最后采用TChart提供的绘图控件进行弹道曲线绘制. 该模块实现如图4 所示.

图4 弹道及射表快速计算程序Fig.4 Ballistics and firing table fast calculation
2.2 基于OSMDroid的任务规划
任务规划模块主要功能为基于地理信息进行靶弹和导弹的发射阵地方案布置,主要分为以下4个步骤:
1) 靶弹任务指标确定: 根据训练任务中的导弹类型、 靶弹模拟的目标类型来确定靶弹的供靶指标(靶弹飞行速度、 飞行高度、 可供靶时间、 弹道倾角等); 然后依据指标进行靶弹弹道及射表计算以确定最优发射参数.
2) 发射阵地确定: 通过定位信息自动切换地图到实际训练场地区域后选择合适的靶弹和导弹发射位置以及靶弹落区,根据地图信息确保训练区域达到发射和训练要求;
3) 任务规划: 通过已确定的供靶指标和发射位置等参数进行任务方案规划,求解导弹航路捷径、 靶弹射角、 射向等参数,并在地图上展示航路捷径、 落区范围、 靶弹飞行区域等.
任务规划实现及参数设置界面如图5 所示. 该模块使用OSMDroid进行开发[13],OSMDroid包含一个模块化的地图操作API,支持在线和离线地图、 覆盖地图、 标注图标、 位置跟踪和绘制形状. 首先通过MapView实现地图瓦片数据的加载,然后实现点线面绘制以及定位功能,最后添加Overlay点击事件实现取点功能.

图5 任务规划参数设置界面Fig.5 Task planning parameter setting interface
2.3 基于VR-Forces的虚拟仿真
VR-Forces是一款兵力生成以及战场仿真软件,其配套工具丰富,包括想定编辑器、 实体编辑器、 对象参数数据库编辑器以及地形数据库工具等,极大地方便用户进行想定编写和战场环境模拟[14,15]. 采用面向对象的思想,其中,每个实体都有对象的行为和属性,可对战术指挥训练、 计算机兵力生成等模拟训练提供所有必要的仿真模拟.
基于VR-Forces的靶弹训练虚拟仿真模块主要是为模拟地面防空部队在面对敌方来袭的低、 中、 高速靶标的场景下,对士兵操作单兵便携式防空武器和车载式防空导弹进行针对性的战术训练及模拟,并提供对空拦截作战训练的辅助决策支持. 基于虚拟仿真模块的仿真需求,并结合VR-Forces仿真平台的特点,给出的仿真模块整体框架如图6 所示.
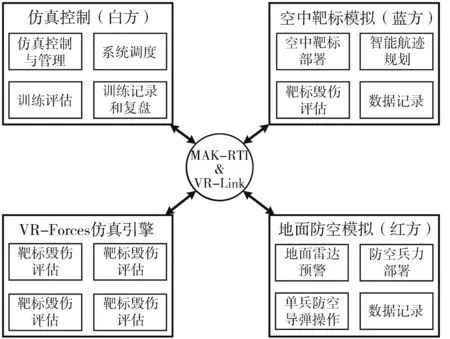
图6 虚拟仿真模块整体框架Fig.6 The framework of virtual simulation module
在VR-Forces中,仿真实体用来表示兵力,在环境中扮演角色并对环境做出响应,执行任务,模拟物理行为[15]. 仿真实体是仿真系统中的重要组成部分,也是影响战术训练结果的直接因素. 为了可以更加准确地模拟不同平台和武器之间的交互,需要对仿真环境中训练场景、 仿真实体和运动学进行实物化建模并在Windows平台下,基于MAK VR-Forces 4.2,以Visual Studio 2010为开发环境,QT 4.7.4为GUI框架,开发实现虚拟仿真模块. 其开发流程为:
1) 训练场景建模. 由于靶弹训练一般在固定场地,所以选定常用训练场地并获取其地形数据(高程数据、 影像和特征数据),然后通过TDB工具制作地形数据文件,将地形数据导出为MTF Files,便可通过VR-Forces进行加载并使用.
2) 仿真实体建模. 采用CAD软件建立靶弹训练过程中涉及的靶弹、 单兵导弹及地空导弹模型并导出为stl格式,通过Multigen Creator软件对模型进行处理并生成VR-Forces可用的flt格式,再通过Entity Editor工具将模型添加到武器和实体库中以供调用.
3) 实体运动学建模. 实体运动学模型主要用于描述空中靶标和防空导弹的物理行为,可分别定义传感器、 控制器和执行器来完成实体模型如靶弹和导弹的任务执行和决策、 信息处理以及与其他实体进行交互[16]; 在靶弹虚拟仿真中,可以实现通信模拟、 靶弹探测、 消息传输以及修改实体位置、 速度、 毁伤等内容,可以更加真实的模拟实际训练内容.
4) 靶弹与导弹弹道仿真实现. 由于VR-Forces平台本身只采用简单抛物线进行弹道模拟,这样无法反应真实弹道运动轨迹,所以通过VR-Forces提供的Plug-in接口来实现靶弹弹道控制. 基本流程为: ① 定义一个执行器,通过执行器获取靶弹或导弹状态信息(位置、 速度、 运动方向和旋转速度); ② 定义弹体坐标系和地面坐标系并计算出实体的状态变化及相关加速度变化; ③ 通过不同时刻和位置及速度计算出实体速度增量、 位置增量、 角速度和角度方位; ④ 将所有信息通过接口Plug-in更新到场景中. 至此便可在VR-Forces中实现靶弹质点弹道方程. 靶弹运动仿真实现如图7 所示.
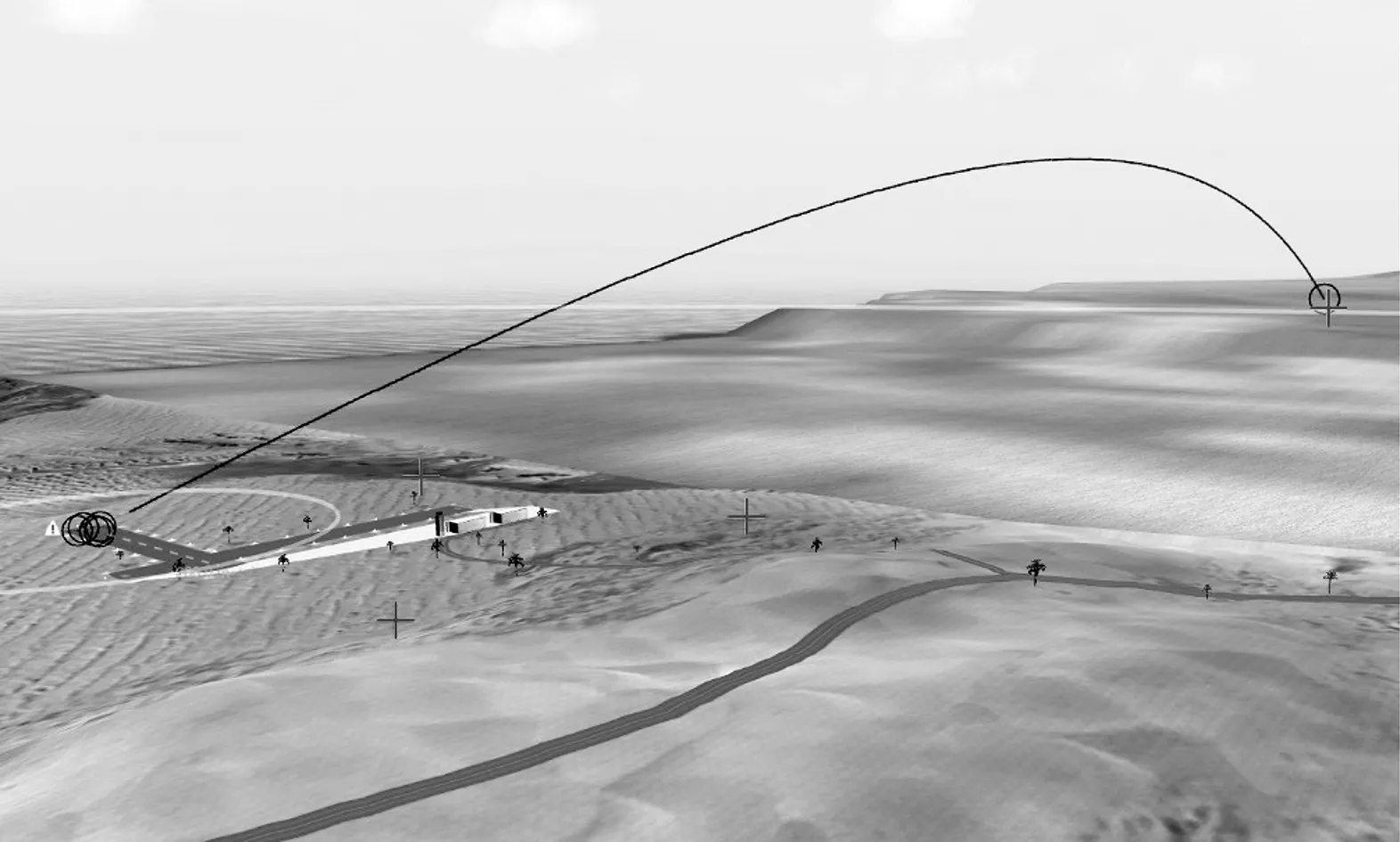
图7 靶弹弹道仿真Fig.7 Ballistic simulation of target projectile
5) 靶弹与导弹任务分配. 通过以上步骤已经建立了虚拟训练仿真的基本场景,现通过想定编辑模块分别为靶弹和导弹编写Entity Plans,然后通过设置Task向实体分配任务,为导弹设置雷达探测范围并开启自主攻击模型,使导弹可以在发现靶弹目标后自主攻击.
3 系统功能验证
为了验证靶弹任务规划与虚拟仿真的各项功能,本文选取便携式地空导弹供靶指标进行仿真分析,各项供靶指标见表 1. 为了方便训练使用,任务规划软件搭载于军用便携式平板之上,如图8 所示,可供训练人员灵活操作.
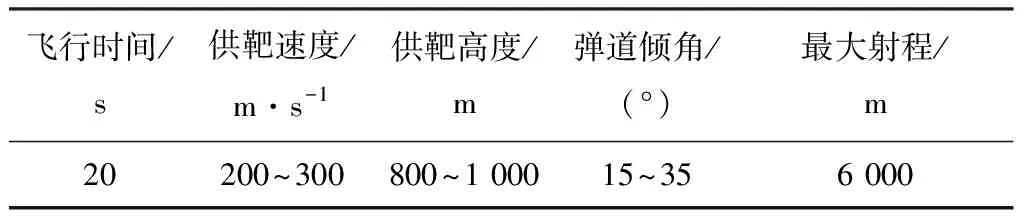
表 1 供靶指标Tab.1 Indicators of target

图8 硬件平台Fig.8 Hardware platform
3.1 弹道及射表计算验证
选定最大射程范围为5 km~6 km进行射表计算,计算结果如图9 所示,由此可得满足供靶指标的靶弹射角应处于32.1°~36.74°之间,此时飞行时间大于26 s,射程小于6 km,靶弹供靶段飞行速度为206 m/s~280 m/s,满足供靶指标要求.
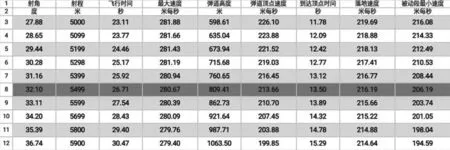
图9 射表计算结果Fig.9 The result of firing table calculates
3.2 发射任务规划验证
任务规划系统是依据导弹的工作过程及性能指标制定相应的靶弹发射策略和方案,用户可在地图上选点,以确定靶弹发射位置和落区,也可直接输入经纬度坐标来实现选点,选点完成后通过解算给出导弹航路捷径、 发射位置、 攻击方式(迎攻或尾追)等参数,并在地图上展示,以供用户选择使用. 在地图上进行一次任务规划操作结果如图10 所示,分别确定靶弹和导弹发射点以及靶弹落区,会自动解算得出任务规划结果,其中,白线为靶弹弹道,黑线为导弹航路捷径,图上还会标记相关训练信息方便查看.

图10 任务规划结果Fig.10 Task planning results
3.3 VR-Forces的虚拟仿真验证
通过弹道计算和任务规划确定导弹防空训练方案后,可在虚拟仿真模块中进行训练预演和方案评估,靶弹训练虚拟仿真场景如图11 所示,进行虚拟仿真时首先分别布置靶弹发射阵地和导弹阵地,然后分别为靶弹和导弹配置仿真参数及任务计划,开始仿真后会根据靶弹和导弹飞行路径预先绘制出运动轨迹如图中防空训练场景所示.
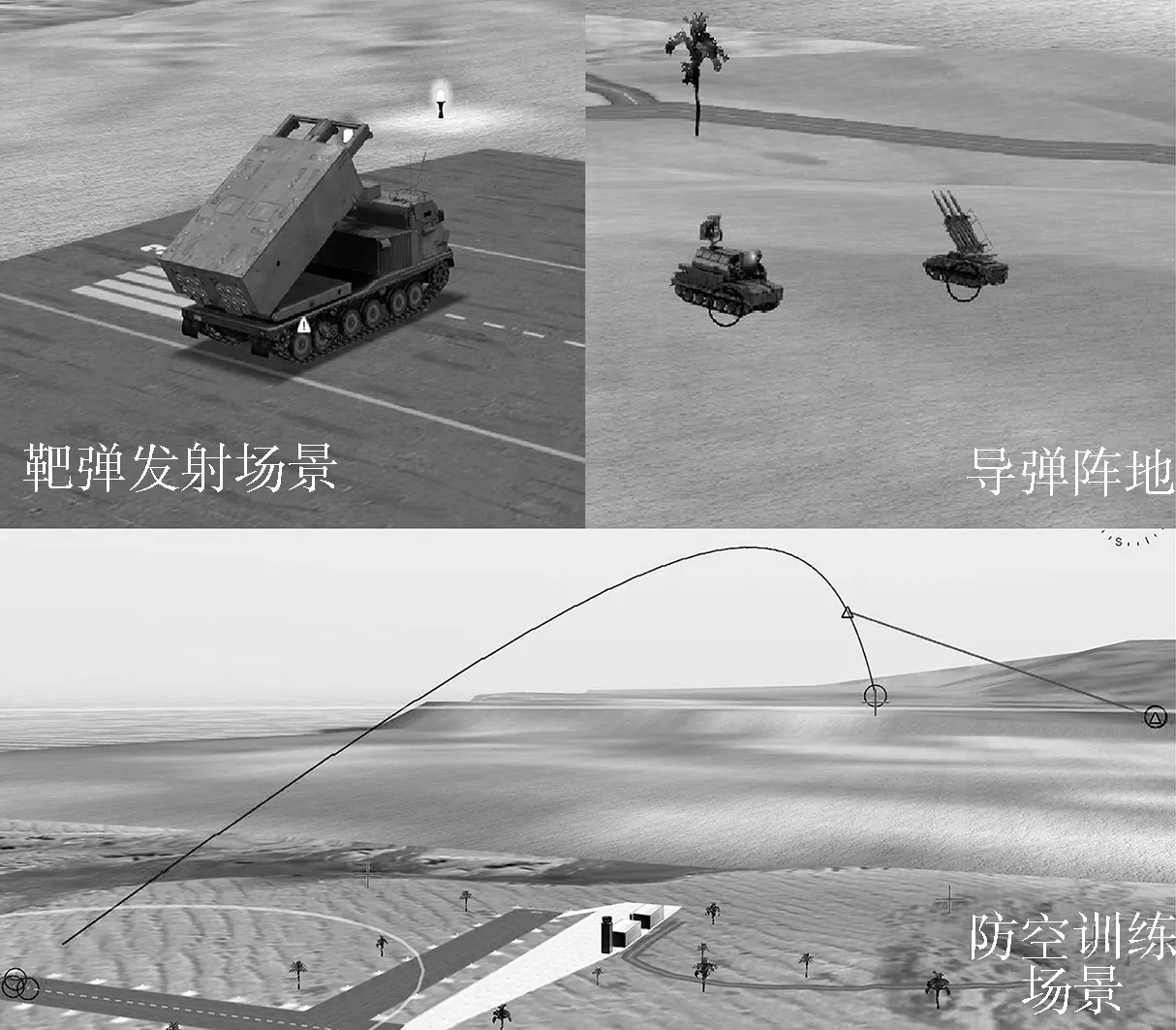
图11 虚拟仿真场景Fig.11 Virtual simulation scenario
4 结 论
本文针对地空导弹训练中高速靶弹任务规划问题,提出了一种基于安卓平台的高速靶弹任务规划系统,采用弹道快速解算与混合编程技术实现了弹道与射表的快速计算,使用OSMDroid开发了基于地图的发射任务规划模块; 基于VR-Forces仿真平台设计和实现了高速靶弹虚拟训练仿真系统,可进行多种任务场景下高速靶弹与地空导弹的训练过程,并对仿真态势进行实时展示; 完成了高速靶弹任务规划系统开发,经过测试验证,系统运行稳定,满足任务规划要求,可以极大提高地空导弹的训练次数与质量,有效缩短战斗力生成周期,降低常规训练成本.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
军事文摘(2020年14期)2020-12-17
电子制作(2019年7期)2019-04-25
兵器知识(2019年1期)2019-01-23
舰船电子工程(2018年12期)2019-01-03
环球时报(2018-10-23)2018-10-23
小哥白尼(趣味科学)(2018年5期)2018-06-21
火炮发射与控制学报(2018年1期)2018-04-02
军营文化天地(2017年12期)2017-03-01
制导与引信(2016年3期)2016-03-20