半液浮陀螺转速自检优化分析
2021-06-17 07:53刘诗超余云鹏谢慧慈
直升机技术 2021年2期
刘诗超,徐 燕,余云鹏,谢慧慈,叶 猛
(1.海装驻南昌地区军事代表室,江西 南昌 330024;2.航空工业洪都,江西 南昌 330024)
0 引言
随着惯性导航技术的发展,作为核心器件的陀螺仪的地位显得越发重要,陀螺的性能直接决定了导航系统的稳定性与精度。同时,陀螺仪作为一种敏感角速率的惯性器件,在飞机、坦克、导弹和鱼雷的控制系统中发挥着重要作用。近几年来,随着我国航空工业的发展,对陀螺提出了更高的要求:不仅要求陀螺抗振动、耐冲击、可靠性高,而且还要求陀螺对环境的适应范围要宽、体积要小、重量要轻、性能指标要高。半液浮陀螺由于其抗振动、耐冲击、可靠性高等优点,广泛应用于飞机的飞行控制系统。它敏感飞机角速率信号,为飞行控制提供条件,使静不稳定的飞机趋于稳定。
本文主要针对飞机使用过程中半液浮陀螺传感器出现转速自检超差问题,对半液浮陀螺转速自检工作原理进行分析,并提出了一种改进方法。
1 半液浮陀螺工作原理
半液浮陀螺主要由同步器、陀螺电机、扭杆、阻尼器等几部分组成。其结构示意图见图1。
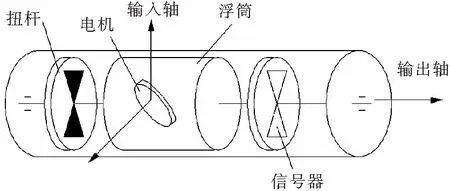
图1 结构示意图
半液浮陀螺加电正常工作后,陀螺电机旋转产生角动量H
。当沿陀螺敏感轴方向有角速率ω
输入时,电机的转子发生进动现象,将产生绕框架轴的陀螺力矩H
·ω
。陀螺力矩使陀螺框架偏转产生β
角,固定在框架上的弹性元件扭杆则产生与陀螺力矩相反的弹性力矩K
·β
(其中K
是扭杆的弹性系数)。当H
·ω
与K
·β
相等时,框架就停止转动,达到稳定状态。框架所转动的角度β
与使它发生进动的角速率ω
是成正比的。微动同步器转子装在浮子组件上,随浮子组件转动β
角,而同步器定子装在壳体上,所以同步器转、定子之间亦转过β
角。β
角由微动同步器转换为输出电压信号,产生相应的电压U
。U
=H
·ω
·K
/K
(1)
其中,H
为陀螺电机的角动量,ω
为输入的角速率,K
为扭杆刚度,K
为微动同步器梯度。半液浮陀螺输出电压U
给飞控计算机,飞控计算机转化成角速率信号使用。半液浮陀螺工作原理如图2所示。
图2 半液浮陀螺仪原理框图
2 转速自检原理
半液浮陀螺电机转速自检信号是用来监控产品陀螺电机运转状态的。转速自检信号正常,说明陀螺电机运转正常;转速自检未通过,可视陀螺电机为故障状态。其电机转速是否正常直接决定陀螺是否正常工作。
本文分析的半液浮陀螺电机转速自检原理是基于电磁感应原理,即放在变化磁通量中的导体会产生电动势。陀螺电机转子上安装两块极性相反的永磁钢,陀螺浮子相关位置安装测速线圈(示意图见图3)。陀螺电机在26V/800Hz电源供电下正常运转时,永磁钢周期性经过测速线圈的检测区域,根据楞次定律将在测速线圈中感应出电压信号,该信号的频率反映了电机转速。转速自检信号理论值为800±80 Hz。
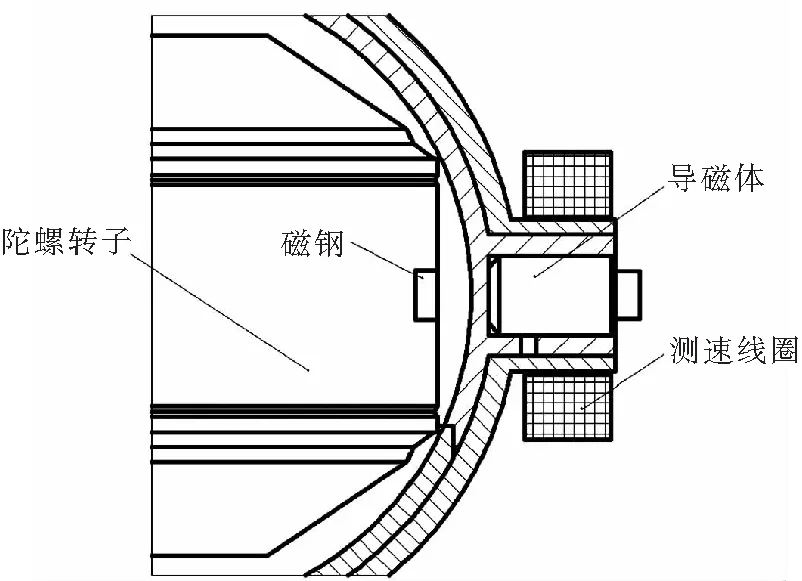
图3 陀螺电机转速监测示意图
半液浮陀螺根据陀螺电机工作状态,发出电机转速自检信号给飞控计算机。飞控计算机把采集到的转速自检信号与理论值进行比较,若超出理论值范围,则判定为转速自检故障。
3 转速自检超差故障树
近期外场飞机进行飞控系统PBIT自检时,多次申报故障陀螺转速自检故障。根据故障现象及转速自检超差的工作原理,建立故障树,将“转速自检超差”作为顶事件进行分析,如图4所示。

图4 转速自检超差故障树
对图4故障树中的每一个可能引起故障的原因逐一进行分析排除,最终确定故障是由于陀螺转速自检测试原理设计存在不足导致。
4 陀螺转速自检测试机理分析
陀螺转速自检输出的信号是一个接近锯齿波的周期信号,并非规则的正弦波或方波。由于结构的限制,陀螺电机结构中无法形成完整的闭合磁路,磁力线是穿过间隙,进入导磁体,再通过空间闭合的,因此这里有很大的非线性因素。磁场是分布式的,距离磁钢近的地方磁力线密集,距离磁钢远的地方磁力线稀疏。磁钢的线速度是指磁钢运动速度沿测速线圈中心线垂线方向的分量。磁钢的线速度按余弦规律变化,由小变到最大,再逐渐变小。每时刻的磁通变化率是这些因素的综合。这些因素的变化趋势、变化幅度以及是增量还是减量均不同,磁通变化率也会有大有小。因此,感应电势会在两个峰峰值之间随机出现比较小的峰值的现象,峰值一般在0.2V~0.5V之间,如图5所示。
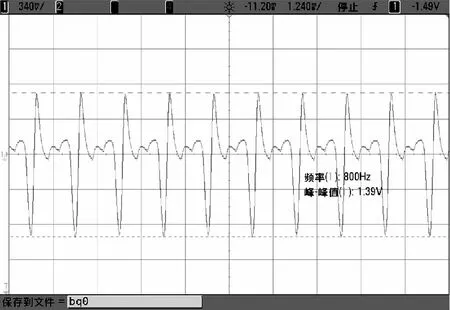
图5 SMRD信号实测波形
由于系统噪声影响或陀螺电机信号自身噪声影响,这个较小的峰值可能会超过飞控计算机测试电路的门限电压值(0.4V),造成飞控计算机错误计数,致使陀螺电机转速自检超差,超出800±80 Hz的范围。
5 优化改进
为解决转速自检超差问题,在陀螺转速自检电路中整形电路,采用比较器及外围元器件组成,将陀螺转速自检信号波形整形为标准方波信号。整形后高电平大于14V,低电平小于1 V,频率为电机电源频率±5 Hz。消除了感应电势会在两个峰峰值之间随机出现比较小的峰值的现象,大幅提高了产品电机转速自检在系统上的可靠性和稳定性,杜绝因原转速自检信号波形中小峰值导致的转速自检超差现象(见图6)。
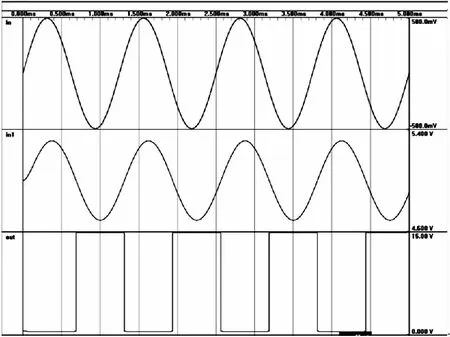
图6 改进后检测电路仿真波形
6 总结
通过对陀螺工作原理和转速自检原理进行分析,并建立故障树,最终确定了速率陀螺转速自检超差的原因是:陀螺磁滞电机感应电动势小,信号传输能力较弱,输出阻抗较大,负载能力低,导致转速自检输出信号出现干扰峰值;且自检输出信号容易受系统噪声影响或陀螺电机信号自身噪声影响,峰值可能会超过飞控计算机测试电路的门限电压值,造成飞控错误计数,致使陀螺电机转速自检超差。经过对陀螺转速自检电路增加整形电路,优化了自检输出信号,有效解决了陀螺转速自检超差问题,提高了陀螺的可靠性。
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
小猕猴智力画刊(2022年4期)2022-05-23
红领巾·探索(2020年2期)2020-05-19
电脑报(2019年10期)2019-09-10
价值工程(2017年11期)2017-04-18
故事作文·高年级(2016年6期)2016-06-21
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10
早期教育(美术教育)(2010年4期)2010-04-13