
无人艇群协同作业功能测试与评估系统设计*
2021-06-24 08:18陈玉明陈卫国
机电工程技术 2021年5期
陈玉明,童 超,任 兵,陈卫国
(1.工业和信息化部电子第五研究所,广州 510610;2.智能产品质量评价与可靠性保障技术工业和信息化部重点实验室,广州 510610;3.华南理工大学机械与汽车工程学院,广州 510641)
0 引言
水面无人艇作为一种新型的水上智能工作平台,在自主巡航、资源勘测等方面发挥着巨大的作用[1]。随着控制理论有效应用于无人艇协同控制方面,无人艇协同技术日趋完善,因此如何测评无人艇协同作业能力,成为了科研人员眼前需要攻克的一大难题。
20世纪60年代后期,美国将V-8汽油机驱动的玻璃钢小艇改装为“拖链式”遥控扫雷艇,以执行越南境内的扫雷作业。受限于当时的技术,无人艇需人工远程遥控,若距离过远或是信号障碍,无人艇便无法接受指令。进入21世纪,随着通信技术和人工智能技术的发展,无人艇技术进入了高速发展期。2003年,“保护者”号无人艇研制成功并交付以色列军方使用,但仍然是需要进行操控的半自主无人艇。2005年,Elbit公司推出一款“黄貂鱼(Stingary)”号USV,能够完成海岸物标识别、智能巡逻、电子战争等多项任务[2]。2004年英国普利茅斯大学研发“Springer”号USV,主要用于内河、水库和沿海等浅水水域追踪污染物,测量环境和航道信息[3]。2007年,以色列国防部研发的“Sliver Marlin”号无人艇,已经具备了自动避障、自动驾驶和超视距操作等功能[4]。这时的无人艇已开始逐渐走入自主操控的阶段。还有葡萄牙、德国、荷兰等国也都走在无人艇研发的前列,在无人艇领域,各个国家都在深入研究,以求抢占先机。我国相关项目起步晚,但近年我国技术迭代快。如上海大学研发的“精海”系列无人艇,在无人艇行驶上实现了自主定位、障碍物自主避碰、航迹自主跟踪等功能[5]。
随着单无人艇技术日趋成熟,多无人艇的编队控制形式与协同等方面研究逐渐成为热点[6-7]。无人艇多艇协同作业本质上是一个多智能体系统的开发,多机器人系统多个机器人同时工作,其任务分配模式[8]更先进,极大提高了效率,并且可以完成一些个体无法完成的任务。面对协同作业多功能出现,目前并没有一个完整的系统来测评无人艇协同效率与水平[9]。无人艇群测评将对无人艇协同作业能力起到极大的促进提升作用。本文旨在通过指标测量和数据分析,设计出一套可以用于评测无人艇编队与无人艇协同探测水平的评测方法及系统。
1 无人艇群协同作业功能测评系统设计
本文所设计无人舰群协同作业测评系统的功能是对无人舰群协同作业相关信息进行收集与分析,进而实现对协同作业整体水平评价。首先,评测系统将不可量化的信息转化为代表无人舰群协同作业能力的可量化指标,接下来针对不同指标采用不同方法进行计算,最后汇总为无人舰群协同作业能力的综合评价指标。其中测评系统的输入输出多为数字,且需生成关于评估指标结果的分析图信息。
1.1 评价指标选取及量化
从信息收集的角度来看,无人艇群内部的信息交互,能够得到对外部信息较为完整、准确的认知。然而由于集群收集到的信息较多,如何评价无人艇群的作业能力成为目前的难题。本文通过完备性、准确性、连续性、相关度、时效性5个评价指标对无人舰群协同作业能力进行评估。
(1)完备性
监测的完备性由区域监测率表示,现定义区域监测率为无人艇群监测范围与需探测区域范围的比值。则可通过其定义的集群中心、集群半径,结合无人船个体的监测范围表示出无人艇群的实际监测范围。假设现在有面积为S的海域面积需要进行监测,无人艇群中的无人艇数量为N,在t时刻,p(t)为无人艇群的虚拟集群中心,假设第k艘无人艇的位置为Pk(t)监测信息半径为rk,则无人舰群的集群半径Rp、理论监测范围Rk、实际监测范围R表示为:

在t时刻区域监测率为:

(2)准确性
目标的离散属性准确性是指目标物上可以收集到的不随时间变化并且之间没有太大关联的无人艇群准确性。假设无人艇群中有N架无人艇,第i艘无人艇在t时刻监测到了m个目标物的k个离散属性特征。现在引入,表示第i艘无人艇在t时刻监测到的第j个目标的第h个离散态特征与实际情况的一致性。则其公式表示为:

则在t时刻,该无人艇群的准确性为:

(3)连续性
在收集目标物连续性态势的时候,收集的是目标物的轨迹,由于航迹的段数与最终能力很难度量,本文采用了最长航迹段所用的时间与实际航迹的时间的比值来表示最长连续航迹段比。假设无人艇群中有N艘无人艇,无人艇n号察觉到了M个目标,其中Tk为第k个目标的持续出现时间,Tk,m为无人艇n收集到的第k个目标的航迹中最长的一段所占得时间比,则单艘无人艇的航迹比为:

根据单艘艇的最长航迹比,可推出无人艇群最长航迹比计算公式为:

(4)相关度
无人艇群在开始收集目标信息是每一艘无人艇所搜集的目标物信息的整合。而当设定无人艇群执行某一任务时,如果无人艇在收集到了很多无用的信息,则可评价该无人艇群执行任务时相关度指标不高。进行量化这个指标。假设无人艇群中有N艘无人艇,在t时刻,无人艇个体n收集到了M个目标,并且在当时情况下执行了R个任务,那么在t时刻,第n号无人艇获取到第j个目标的相关度为:

则此刻无人艇群的相关度为:

(5)时效性
时效性是是指搜集信息时间满足任务要求时间的程度,下面是针对无人艇信息传播获取延时提出时效性的计算方法。假设无人艇群中有N艘无人艇,第j次信息更新的时间为tk,第n艘无人艇接收到了M个目标物的信息,n号无人艇获取第K个目标物信息的延时为Δtk,n,若T为无人艇每次更新获取信息的最小时间,则无人艇n的时效性为:

则在tj时刻,无人艇群的时效性评价为:

1.2 系统人机交互界面设计
无人艇群评测系统人机交互界面由输入面板、输出面板组成。在输入面板的构建过程中,需将评测指标计算所需参数都输入到系统中,具体有无人艇群数量、目标物数量、区域面积、无人艇监测半径、无人艇集群半径、监测采集到的速度和实际的速度、加速度、航向角6个输入量、时效性相关矩阵之外,还需要一个输入最小反应时间的输入口来帮助其完成计算。接下来整体的输入面板进行排版,最终输入面板如图1所示。

图1 整体输入端界面
在本评估体系中,为了量化无人艇协同能力的各个指标,其最终的结果都是用公式计算出来的数字,其输出形式简单,根据不同的指标结果设定文本框用于获取计算结果即可。评价指标分别为完备性、准确性、连续性、相关度、时效性。系统面板中配备了一个“开始数据分析”按钮,摁下按钮进行数据分析,同时设置一个“清零”按钮,摁下就对面板进行清零,方便下次使用。最终得到的整体前面板如图2所示。
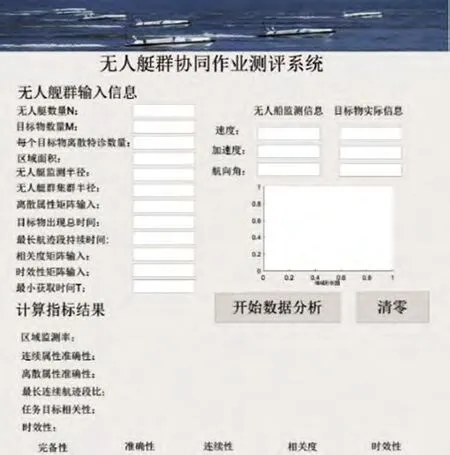
图2 测评系统整体界面构建
2 无人艇群协同作业测评系统测试
2.1 实验设计与过程
完成系统的设计后,本节使用测试数据验证评测系统的有效性。在本次测试设置的实验中,为简化实验,剔除了不必要的变量,保留最重要的系统变量值。实验情景如图3所示。无人艇从左边起点开始向前进行区域探测,在目标进入无人艇的探测范围开始,进行试验的数据采集。
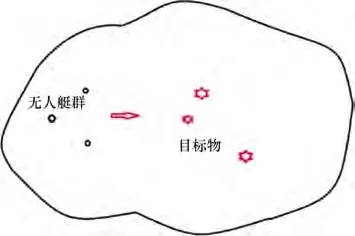
图3 实验情景
实验设置在10 000 m2的海域上,3艘无人艇以10 m/s的速度前行执行探测任务,同时无人艇还预设有4个子任务,在探测区域的中间有3个目标物以及2个无关目标。当无人艇群开始探测到目标时,目标物以15 m/s的速度往前逃离。无人艇识别度目标物之后开始进行监测追踪,并开始识别判断,一直到目标物驶离测试海域。实验过程中的其他设定值如表1~2所示。
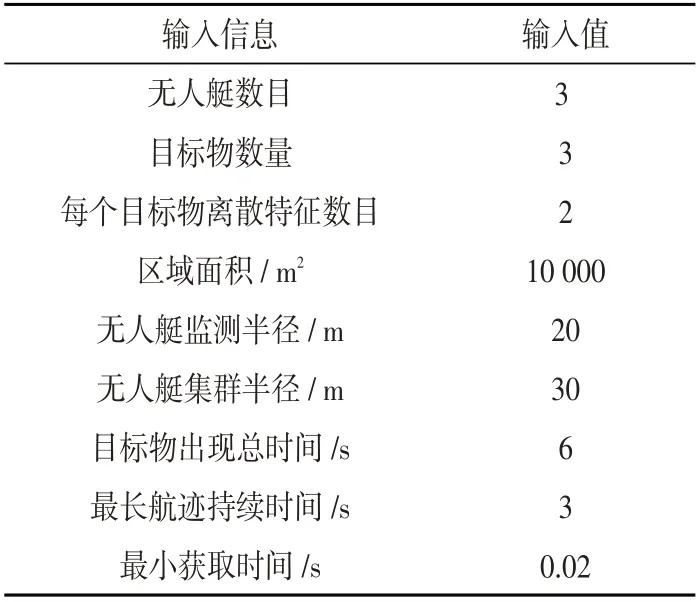
表1 测评系统输入信息表
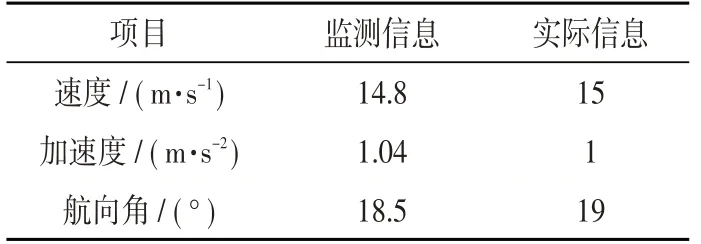
表2 测评系统输入信息表
还有3个矩阵的输入则分别为离散属性矩阵、相关度矩阵、时效性矩阵。因每艘艇收集的离散属性量为目标数量与每个目标物离散属性数量为6个,3艘艇一共18个离散属性输入。本次实验中,离散属性矩阵设置为:

相关度矩阵是判断目标物是否与本次任务目的的重要依据,本次实验一共有5个目标物,设置3个与任务相关,2个与任务不相关。相关度矩阵为:

时效性矩阵是用于记录每艘无人艇获取每个目标物的属性的延时,共有3艘艇,每艘艇获取3个目标物信息,则其矩阵为:

将所有信息输入完毕后,点击“开始数据分析”按钮,获取分析结果。
2.2 实验结果与分析
通过数据分析后,系统计算得出的结论如图4所示。从图中可看出区域监测率为0.785,此次实验设置的区域面积较小,无人艇群执行的是区域监测任务,本次实验设置的无人艇数目相对较少,其区域监测率计算出这个结果较低,属于正常现象。

图4 实验结果
准确性方面,连续属性准确率比起离散属性准确率较低,说明无人船在获取目标的连续属性时,受到海域情况、船体本身信息采集器以及收集信息相对位置、角度的影响。离散属性因为是一些特征信息,准确率较高。
连续性方面,0.5的数值准确地反映了连续性属性。无人艇集群从发现目标到加速追踪目标的过程中是一直在收集信息的,这个时间段的信息会因为两者速度不对等而造成航迹的断开,无法获得准确、连续的航迹。这次测评结果说明无人艇群的连续性能力不好,还不能够稳定、连续地执行好任务。
相关度为0.78,所有指标中最高。此次任务情景无关目标物设定2个,任务目标3个,无人艇识别其过程中,能够很好地识别出任务无关目标并且剔除,将注意力和反应力集中在任务相关目标上。
时效性很大程度上受到通信技术的影响,这也是未来多智能体协同中的至关重要的一个方面。这次设定的时间最终测评出时效性指标为0.46,时效性不强。
整体来说,针对输入的数据,本次实验得到了符合预期的结果。测试的结果符合实验设定预期,测评系统能够很好地完成预期的目标。
为进一步说明评测系统有效性,本文增大了模拟海域面积与无人艇数量重新进行了实验。在海域面积为100 000m2的海域上,10艘无人艇在海面上执行区域探测任务,无人艇群以10 m/s的速度前行进行区域探测。在海面的不同位置有6个任务相关的目标物与4个与任务不相关的目标物在按照预定轨迹运动。每个目标物有2个离散属性。无人艇群在执行区域探测任务的同时还执行有5个子任务,当发现敌对目标时,会触发任务优先级,将监测敌方目标作为首要任务。无人艇的数目增多与目标物的数量增多,使得信息变得更多且复杂,也出现了一些信息无法在最短时间内在艇体及目标物间传播。将以上信息输入到系统中,点击开始数据分析按钮,获取的分析结果如图5所示。
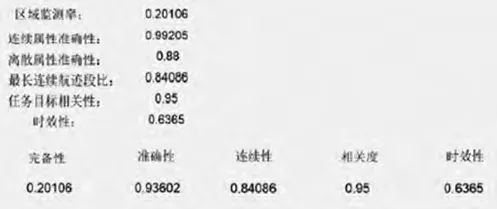
图5 多艇多目标测试实验结果
从输出结果可以看出随着区域面积相对变大,无人艇的数目增多,无人艇群的连续属性准确性越来越高。区域监测率方面,无人艇数目增多,但是所需监测的区域面积也增大了,区域监测率降低。连续性指标方面相对之前的测试提升较大。无人艇数目多了,整体的集群机动性也更强了,对目标物做出的快速反应能力也更强了。这个属性越高,无人艇群在执行任务时对未知情况的反应能力越强。相关度指标也相应地有所变高,多艇识别目标物与任务的相关属性使得偶然出现的识别错误的几率降低,识别的准确率提高,时效性指标有较大的提升。系统的处理结果是合理有效的,能够较为真实地反映出无人艇群的协同能力。
3 结束语
本文设计了一种无人艇群协同作业测评系统并进行了测试。具体为采用信息优势度量法作为测评方法,根据无人艇群协同作业的特点设计无人艇群协同作业能力水平的评价指标。采用MatlabGUI可视化面板构建可与用户交互的测评系统面板,并通过测试数据验证系统的有效性。结果表明,测评系统能够给出符合预期的处理结果。本次设计的测评系统初步满足对无人艇群协同作业功能的测试与评估要求。
猜你喜欢
新班主任(2022年4期)2022-04-27
科学大众(2020年23期)2021-01-18
都市生活(2019年5期)2019-08-01
小哥白尼(军事科学)(2019年2期)2019-04-17
汽车观察(2019年2期)2019-03-15
小哥白尼·趣味科学画报(2019年12期)2019-02-28
新闻传播(2018年14期)2018-11-13
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
中国卫生(2016年5期)2016-11-12
