
全自动无人驾驶列车受电弓控制电路设计
2021-06-24 08:19江巧逢
机电工程技术 2021年5期
江巧逢,王 峥,夏 峰
(中车南京浦镇车辆有限公司,南京 210031)
0 引言
随着科学技术的发展以及城市轨道交通自动化水平的不断提高,全自动无人驾驶系统已在世界很多城市的轨道交通中得到了广泛实践和应用。目前,国内外如哥本哈根、巴黎、温哥华、香港、上海、北京、深圳等城市的全自动无人驾驶列车已正式投入运行,纵观世界,全自动无人驾驶(unattended train operation,UTO)系统正引领着城市轨道交通未来的发展趋势[1-2]。为了提高城市轨道交通网络化建设的先进性,同时提高城市轨道交通系统的运营效率和自动化水平,与世界先进城市轨道交通系统接轨,各地的轨道交通系统建设纷纷选择了全自动无人驾驶系统。受电弓作为从接触网吸取电流供动车使用的核心部件之一,对实现全自动控制至关重要。
目前地铁车辆受电弓主要采用电动弓或气动弓,无论是电动弓还是气动弓均需要司机通过操作升降弓4挡控制开关或者升降按钮进行受电弓控制[3-5],同时,应急状况下操作辅助压缩机启动按钮进行应急升弓[6],但全自动无人驾驶列车无司机值守,无法执行上述操作。为了解决这一问题,本文提出了网络系统正常、网络系统故障以及总风气压过低时通过辅助压缩机应急升弓3种不同工况下的受电弓控制电路,整个受电弓升降控制可在无司机值守情况下自动实现,从根本上实现了受电弓全自动升降弓控制,而且该控制方案采用冗余的列车网络系统控制代替传统的硬线控制[7],节省了成本,提高了系统的可靠性,将在我国城市轨道交通中得到广泛应用。
1 系统
目前地铁车辆受电弓主要采用气动弓或电动弓,无论是气动弓还是电动弓都应配备应急升弓装置辅助压缩机,当车辆总风气压过低时仍可以将受电弓升起。在有人驾驶地铁车辆中,通常配备升、降弓四挡控制开关或升、降弓按钮通过硬线控制受电弓升弓或降弓,但全自动无人驾驶列车中无司机值守,无法操作开关或者按钮,更多地采用自动升降弓控制和自动应急升弓,硬线只是作为一种备用模式,本文基于全自动无人驾驶列车,对受电弓在不同工况下的升弓和降弓控制电路进行分析,同时当车辆总风气压过低时使用辅助压缩机升弓。
2 受电弓控制电路
2.1 网络正常时受电弓控制电路
图1所示为网络正常时受电弓升降弓控制原理[8],其中,PTLOCB为受电弓逻辑输出断路器;LPTCB为降弓回路断路器;PTCB为受电弓回路断路器;RCMCB为救援模式断路器;RCMR为救援模式继电器;LPTR为降弓继电器;RPTR为升弓继电器;LPPR为升降弓到位继电器;PANMV为升弓电磁阀;LPPS为降弓到位开关。
在网络系统TCMS通信正常工作且气压充足情况下,受电弓升弓和降弓控制信号均通过TCMS的双冗余RIOM模块输出[9-10]。全自动列车无司机值守时,列车网络系统根据信号系统ATC的命令输出升双弓或降双弓命令。当发出升双弓命令时,降弓继电器LPTR不得电,对应升弓控制回路上的常闭触点保持闭合状态,实现升降弓互锁,升弓继电器RPTR得电,对应的常开触点闭合,升弓电磁阀PANMV得电,受电弓在气压充足情况下升起,同时为了避免运行过程中意外降弓,使用升弓继电器RPTR辅助触点进行升弓保持;当发出降双弓命令时,LPTR得电,升弓控制回路上的LPTR常闭触点断开,RPTR延时1 s失电,升弓电磁阀PANMV失电,受电弓通过自身重量降下,延时降弓目的让车辆辅助逆变器停机工作,避免带载降弓产生拉弧,对受电弓和接触网产生损伤。为了方便观察受电弓升弓或降弓状态,设置降弓到位压力开关,当受电弓降弓到位时,降弓到位开关LPPS闭合发出降弓到位信号给TCMS,可通过TCMS观察受电弓状态;受电弓升弓时可结合压力开关和高压存在信号综合判断升弓到位。与传统电路相比,此设计电路采用双冗余RIOM模块输出升双弓或降双弓命令,替代了有司机值守的按钮或者开关,节约了成本,并且减少了人工操作的失误,提供车辆运营的可靠性。
2.2 网络故障时受电弓控制电路
当网络系统TCMS故障且气压充足时,无法通过RIOM模块输出升弓、降弓指令,但是为了不影响正线运营,减少救援概率,提供列车的可靠性,本文提出了网络故障时受电弓控制电路,如图2所示[8-9]。图中,PANTCB为受电弓控制电路断路器;EMPB为蘑菇按钮;RMS为救援模式开关;CRPR为蠕动模式继电器;WOSR1为车间电源继电器1;WOSR2为车间电源继电器2。当蘑菇按钮没有被按下,蘑菇按钮EMPB不得电;或高压隔离开关不在车间电源位,车间电源继电器WOSR1和WOSR2不得电情况下,降弓列车线“LOWBRPANTO LINE”也不得电,在全自动驾驶模式下,ATC自动进入降级蠕动模式,蠕动模式继电器CRPR得电,救援模式开关RMS在全自动驾驶模式下处于“OFF”位,即RMS的3和4点位常闭;当进入蠕动模式后,升弓列车线“RESCUE LINE”列车线得电,升弓继电器RPTR得电,受电弓保持升弓状态。如有司机值守的列车,司机可操作RMS开关至“RCM”位,受电弓也可保持升弓状态。如需降弓,可将RMS开关至“LP”位,降弓列车线得电,受电弓降下,同时辅助逆变器停机避免载降弓产生拉弧。

图1 网络正常时受电弓升降弓控制原理
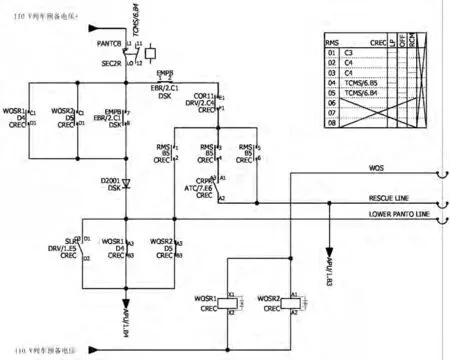
图2 网络故障时受电弓升降弓控制原理
2.3 总风气压过低时辅助压缩机应急升弓控制
对于气动弓需要供电正常且气压充足时才能正常升弓,但是正线运营总风气压过低的情况也常有发生。为了减少这一故障,本文又提出了总风气压过低情况下通过辅助压缩机全自动应急升弓控制电当车辆总风气压过低时,受电弓无法正常升起,此时网络检测压力开关ACMPS的状态,若辅助压缩机气压低于0.7 MPa,ACMPS压力开关闭合,同时继电器ACMSR得电,对应常开触点闭合,TCMS路,如图3所示。图中,ACMCB为辅助压缩机断路器;ACMPB为辅助压缩机启动按钮;ACMPS为压力开关;ACMK为接触器;ACMSR为继电器;M为辅助压缩机电机。
检测到压力开关状态为高电平,发出启动辅助压缩机指令,接触器ACMK得电,对应主触点闭合;辅助压缩机电机供电正常,启动工作,直至压力大于0.9 MPa,压力开关ACMPS断开,ACMSR失电,网络收到低电平信号,ACMK失电,辅助压缩机电机停止工作。
为了防止压力开关ACMPS粘接等故障发生,TCMS启动辅助压缩机工作4 min后还未收到压力开关断开信号,TCMS自动发出断开信号,ACMK失电,辅助压缩机也可停止工作。如有人值守列车时,也可按下电气柜内ACMPB按钮,启动辅助压缩机,控制原理同TCMS控制,只是在全自动驾驶列车中网络替代了压缩机启动按钮ACMPB,可减少启动按钮,从而节省成本。

图3 辅助压缩机应急升弓控制原理
当车辆总风气压充足时,受电弓由总风供气,但当总风气压不足或过低无法升弓时,需通过辅助压缩机气压进行升弓,辅助压缩机压力开关控制动作风量校核如下。
已知:受电弓升弓压力为0.45 MPa;辅助升弓风缸容积为10 L;受电弓气缸容积为4.46 L;升弓电磁阀至受电弓管路长度约5 m。
受电弓管路容积:5×1 000×3.142×(12-3)2/4=318 127.5 mm3≈0.318 L。
不考虑受电弓泄漏,根据P1×V1=P2×V2,假设当总风没气,升弓风缸的压力为P时可升弓:
10×P=(10+0.318+4.46)×4.5,得出P=0.665 MPa
考虑管路泄漏量为10 kPa/min,因此,当辅助升弓风缸的压力大于0.665 MPa时,可进行升弓,考虑一定的余量,选择压力开关闭合压力为0.7 MPa。
2.4 无人驾驶列车升弓自检流程
在全自动无人驾驶列车中,列车唤醒后,只有通过自检流程完成才能正常发车,如图4所示。
当列车唤醒后,TCMS检测车辆主风缸压力,当总风压力大于或等于0.55 MPa时,发出升双弓指令,并检测受电弓状态,若2台受电弓(以一列车2台受电弓为例)均升起,辅助逆变器自动启动,进入下一步自检流程;若检测到任一台受电弓未升起,则认为存在故障,自检结束检查故障。
当总风压力小于0.55 MPa时,TCMS检测辅助压力开关状态,当检测到两台辅助压缩机的ACMPS均处于打开状态,就可判定此时辅助压力大于0.7 MPa,可发出升弓指令,自检流程同上。当检测到任一台辅助压缩机的ACMPS处于闭合状态,TCMS启动辅助压缩机,当检测到两台辅助压缩机的ACMPS均处于打开状态时,辅助压缩机停止工作,发出升弓指令,自检流程同上。如经过4 min检测到任一台辅助压缩机的ACMPS仍处于闭合状态,则TCMS发出停止辅助压缩机指令,辅助压缩机停止工作,TCMS发出升双弓指令,检测受电弓升弓状态,如两台受电弓均升起,则启动辅助压缩机,判定该辅助压缩机的ACMPS状态故障,进入下一步自检流程;若一台受电弓升起,辅助逆变器自动启动,空气机启动工作,TCMS检测总风压力大于或等于0.55 MPa时,自动升起另外一台受电弓;若另外一台受电弓升起,则判定另外一台受电弓所在车辅助压缩机故障,进入下一步自检;若另外一台受电弓未升起,则自检结束,检查故障。如经过4 min后TCMS发出升双弓指令,2台受电弓均未升起,则判定辅助压缩机故障,自检流程结束。

图4 无人驾驶列车升弓自检时序
3 结束语
全自动无人驾驶列车是高集成化、高自动化、高密度、大客流的运营需求的车辆,避免了人为操作造成的不利因素,降低了安全风险[1]。本文提出基于网络系统正常时对受电弓自动升弓或降弓控制;网络故障时由信号系统控制自动进入降级运行模式受电弓控制;制动空压机故障情况下使用辅助压缩机应急升弓控制,应用于3种不同工况下的受电弓全自动控制电路,同时该电路替代传统有司机值守开关和按钮操作,节省成本,减少误操作风险,极大提高了城市轨道交通运营安全性、可靠性和运营效率。
猜你喜欢
幼儿画刊(2021年5期)2021-12-02
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
模具制造(2019年4期)2019-06-24
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
时代农机(2018年12期)2018-02-14
浙江大学学报(工学版)(2015年7期)2015-03-01
单片机与嵌入式系统应用(2014年9期)2014-03-11
铁路技术创新(2011年4期)2011-10-25
