一种新型的自动取餐机控制系统的设计
2021-07-08 12:24罗文志欧启标赵剑川
广西物理 2021年1期
罗文志,欧启标,赵剑川
(1.桂林威领电子科技有限公司,广西 桂林 541004;2.广东机电职业技术学院电子与通信学院,广东 广州 510550)
1 引言
随着我国城市化进程和电子商务的高速发展,自动米饭售卖机[1]、智能鲜食面售卖机[2]、自动售餐机[3,4]以及其他的售货机[5,6]等陆续出现,极大方便了人们的生活。另外,随着生活节奏的加快,网上订餐已经成为生活中的一种主流[7,8]。但由于外卖送餐时间受多种因素的影响,故存在着很大的不确定性。送餐时间早了,公司还没有到下班时间去拿外卖会影响公司的工作并给公司管理带来了一定的麻烦。送餐时间晚了,又没有足够的时间休息,由此又会影响到下午工作时的工作效率。为此,开发出一款类似自动售货机的智能自动取餐机成为必须。智能自动取餐机可以放置于公司的某个相对方便的地方,餐饮企业提前将盒饭放置于取餐机中,客户方公司下班后员工到取餐机前根据屏幕提示输入取饭码或扫码拿走盒饭。这样,既不影响手中的工作,又能及时吃上饭,有效增加午休时间,提高下午工作的工作效率。本设计的自动取餐机基于3G/4G 网络,使用STM3H743 芯片作为主控芯片,能够实现客户方的自动取饭,并将取餐机中的餐盒信息及时发送给商家,让商家实时了解取餐机中的盒饭情况。
2 系统组成及其基本原理
整机系统如图1 所示。由图1 可见,整机主要由货道、升降天车(出货天车)、显示屏和取货口组成,除此之外,还有一个纵向的57 电机和一个横向的42 电机。纵向电机用于驱动出货天车的上下运动,横向电机用于在出货天车上的推牌,使得饭盒从货道出口被推到出货口,完成出货。出货天车和盒饭的位置由电眼探测,整个电眼定位系统由层定位光眼和推牌光眼组成,其中层定位光眼用于确定盒饭是否已经被推上出货天车,推牌光眼用于探测出货天车上面的盒饭是否被推到出货口。当出货天车运动到所在的层并稳定后,主控制器根据输入编码将盒饭推到出货天车上,然后出货天车返回到出货口层,接着其上的步进电机开始运动,将盒饭推送到出货口,完成一次取货流程。
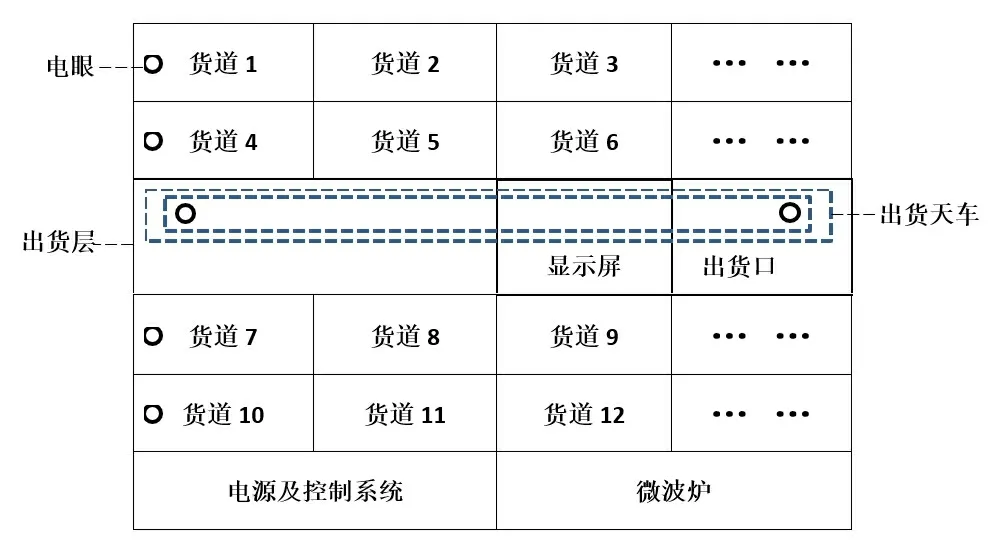
图1 自动取餐机基本组成框图
3 控制系统硬件设计
整机硬件设计框图如图2 所示。由图可见,整个控制系统除了电源之外,由6 个模块构成,其中支付模块支持输入编码和微信、支付宝等扫码方式。光眼定位系统用于出货天车和盒饭位置的探测。LCD 显示屏采用触摸屏,用于显示相关信息、广告和编码输入。丝杆电机用于驱动升降天车的上下移动和盒饭在货道上的左右移动。电机驱动模块用于开启或者关闭出货门。主控模块使用STM32H743 作为主控制器,负责用于对输入信息进行处理和根据输入信号驱动各个模块的工作。
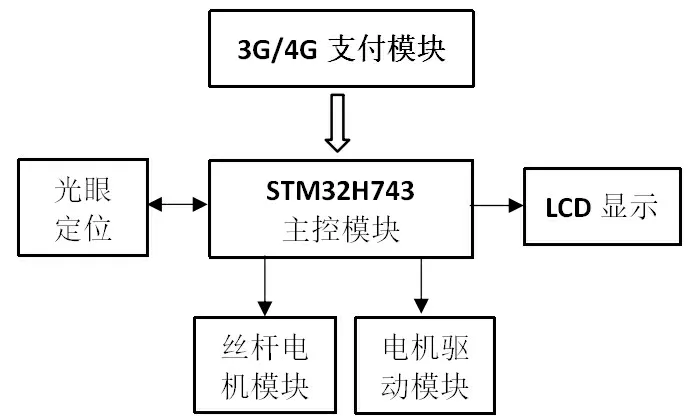
图2 整机系统框图
下面对一些比较重要的模块的驱动电路进行介绍。
3.1 盒饭货道驱动电路
对于各盒饭货道,采用MOS 管进行驱动,驱动电路如图3 所示。
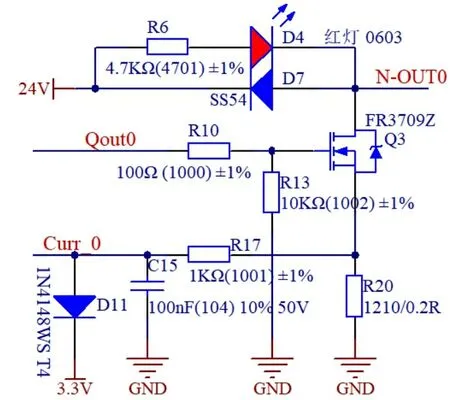
图3 各盒饭货道驱动电路
图3 中,Qout0为MOS 管FR3709Z 的驱动信号,Qout0输出高电平可使MOS 的源极和漏极导通,MOS 管进入工作状态。Curr_0为MOS 管驱动电流采样端,MOS 管工作时,电流流过采样电阻R20,采样此电阻两端的电压值再根据R20的值,可以计算出MOS 管的工作电流,并据此得知MOS 管驱动的货道电机是否堵转。D4 为驱动指示灯,当MOS 管处于导通状态时,D4 亮,表示该MOS 管(货道)正在工作。电阻R13的作用为下拉MOS 管驱动信号,系统上电时,如果主控芯片还未曾提供控制信号,则R13的下拉可使MOS 管处于截止的状态。
3.2 取物门驱动电路
取物门为上下升降金属门,其质量比较重,使用大功率电机方可正常运转,此电机的正反转由大功率H桥驱动,整个驱动电路如图4 所示。
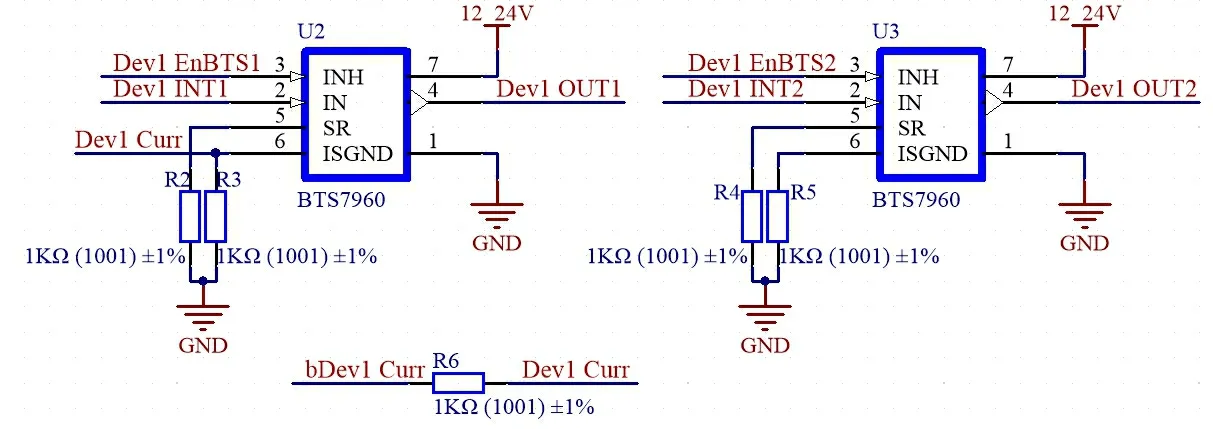
图4 取物门驱动电路
图4 中,BTS7960 为半桥驱动芯片,两个BTS7960 可构成一个完整的H 桥。Dev1_EnBTS1 和Dev1_EnBTS2分别为两个半桥的使能信号。当两个信号同时使能时,通过Dev1_INT1 和Dev1_INT2 控制H 桥的输出,从而控制电机的正反转。直流电机的2 个接线端分别挂在Dev1_OUT1 和Dev1_OUT2 上。
另外,此电机功率较大,本身成本较高,并且涉及到用户的安全,所以需要对其工作情况进行检测,其中Dev1_Curr即为电流检测端。引脚6(ISGND)为BTS7960 的采样电流输出引脚,在本设计中,通过外串联一个1K 电阻,将该电流信号转为电压信号,然后经由Dev1_Curr送到STM32 的ADC 进行模数转换,并由转换结果得知电机正反转时的工作电流情况。
3.3 输入总线电路
由于STM32 的引脚有限,而本系统涉及到多个电眼信号的输入检测,所以需要对其检测接口进行扩展。扩展电路之一如图5 所示,通过采用缓冲器分时使能方式,进行输入总线的扫描检测。电路如下:
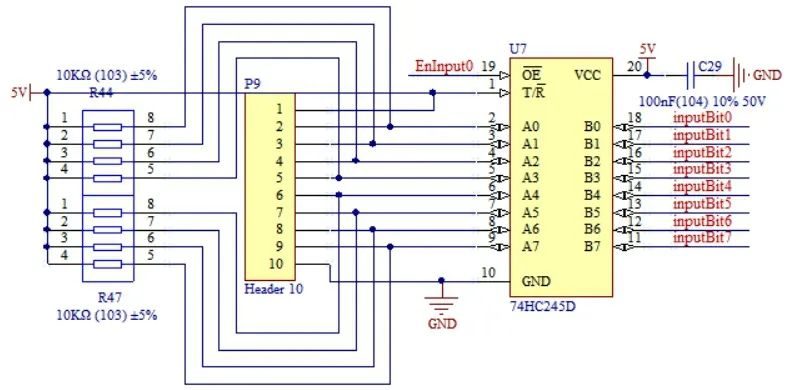
图5 基于74HC245D 的扩展接口电路图
在图5中,74HC245的T/R引脚接5V电源,其数据的传送方向为从左到右。左侧接检测端输入信号,通过排阻上拉以稳定其信号。右侧的inputBit[7:0]接在MCU上,通过分时片选其中一片74HC245,逐个扫描其输入状态,据此可以完成多个输入源的检测。
4 软件系统设计
整机软件系统分为两个部分,分别为订单系统和出货系统。
4.1 订单系统
订单系统负责监听支付模块或者安卓上位机的指令,从而生成相应的订单出货任务,放置于任务列表中。整个订单系统如图6 所示。
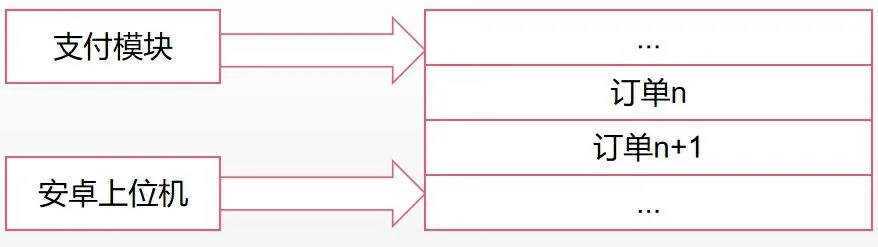
图6 订单系统
4.2 出货系统
出货系统负责监听订单列表,如果订单列表中存在未处理的订单,则处理订单。出货系统处理订单的主要流程如图7 所示。
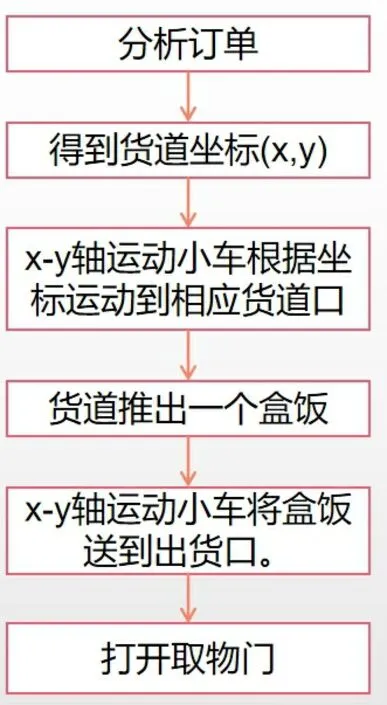
图7 出货系统
5 结论
本文给出了一种自动取餐机设计方案,能够实现输入编码、扫描取餐和加热功能等。目前该方案已经在合作企业平台上运行并取得了预期的效果。后期将添加启动取餐机的运行状况监视,当设备有故障或者异常时,能实时将相关数据和情况发送给维护人员,方便维护人员及时快速处理。
猜你喜欢
今日农业(2022年4期)2022-11-16
汽车实用技术(2022年7期)2022-04-20
中学生天地(A版)(2021年1期)2021-04-25
中国石油石化(2021年9期)2021-03-30
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
当代陕西(2018年9期)2018-08-29
消费者报道(2016年5期)2016-11-18
通信电源技术(2016年1期)2016-04-16
小朋友·聪明学堂(2015年3期)2015-05-11