
低空摄影测量在大比例尺地形图项目中的应用
2021-07-12 03:32李建榕
城市勘测 2021年3期
李建榕
(福州市勘测院,福建 福州 350108)
1 引 言
随着无人机低空摄影技术的不断发展和成熟,低空摄影测量技术被广泛应用于大比例尺地形图的测绘,结合成熟的无人机技术、GPS定位技术、摄影技术等,立足低空飞行,高分辨率影像,高效快捷地完成高精度成图项目。当前无人机市场飞控平台种类较多,应用领域较为广泛,专业级无人机甚至消费级无人机获取的航摄数据,结合专业航测后处理软件,以期满足大比例尺地形图生产的技术要求。
本文结合已完成项目,简析正射航拍模式下,基于专业航测后处理软件,如何快速高效地完成大比例尺地形图测绘项目,分析无人机航测技术满足高精度(中误差≤5 cm)测绘可行性。
2 无人机航测作业流程
利用无人机低空航测技术完成大比例地形图项目,主要包括前期准备工作、外业航摄及像控点布设测量、空三加密、DLG生产(线划图采集、外业调绘、编辑成图)等步骤,如图1所示:
3 无人机航测在1∶500地形图中应用分析
3.1 项目概况
为了较好地进行精度验证,本次应用测试分别对城镇居民区和城市超高楼层居民区两个作业区域进行测量生产及成果研究分析。测区A属于山地地形,主要为村镇建筑区域,测区中地物类型以居民地为主,面积约36亩。测区B为福州市某小区,小区楼高33层,面积约360亩。测区范围如图2、图3所示。

图1 航测大比例尺地形图生产流程图

图2 测区A范围及像控点分布示意图

图3 测区B范围及像控点分布示意图
3.2 像控点测量
本次作业方案,采用先布控后航飞的流程进行外业操作,其中外业像控点的布设,根据测区形状,采用四周按距离均匀布设,内部区域采用稀少布控的方案。测区A共布设7个像控点;测区B共布设9个像控点,点位均选择地面特征标志,像控点分布如图2、图3红色方框位置所示。像控点测量采用GNSS RTK测量方式,以图根控制测量方法,现场实测像控点三维坐标。
3.3 外业航摄
实施航飞前,对航飞区域进行踏勘,选择合适的起降场地,并查看测区地形地貌状况。为航线规划和实施航飞做准备。
目前市场中,无人机飞行器搭载相机的类型主要以单反、微单及卡片式相机为主,需要定期进行相机标定,以保证相机参数的准确性和稳定性。根据地面分辨率、航向及旁向重叠度要求,结合相机参数,如焦距、像元尺寸、像幅大小等参数,计算相对航高、摄影基线长度及航间距等飞行参数,完成航线设计。
根据航飞现场天气状况,设置ISO和曝光等参数,为了保证航拍数据的质量尽量在风力小于4级情况下完成无人机航拍工作。飞机降落后,提取航飞数据,航摄影像及对应POS数据和差分数据,根据地面基站数据和飞机差分数据计算出影像对应的较为精确位置信息,并完成数据质量检查。
(1)无人机航摄系统及航飞参数
本文两个测区分别选用不同类型飞行平台,测区A使用大疆精灵4RTK(图4),搭载相机为FC6310R;测区B采用瑶光垂直起降无人机,搭载相机为Sony rx1rm2(图5)。

图4 大疆精灵4RTK

图5 瑶光垂直起降无人机
测区A和测区B主要飞行参数如表1所示:

航飞参数 表1
(2)航线敷设
因测区A和测区B分别采用两套航摄系统和不同航飞参数,测区A基于大疆精灵4RTK航摄系统,敷设6条航线,共获取248张影像,其中有效影像数为233张;测区B采用垂直起降无人机系统,敷设11条航线,共获取442张影像,其中有效影像数为442张。
3.4 空三加密
本次应用案例中空三加密均使用AT.Pips.Cloud(Pips空三云系统V2.0)完成。Pips空三云系统支持所有框幅式影像数据的解算,能满足各种无人机数据,能处理旋偏角大、高差大的影像数据,集群式全自动、低误配率、多模式的空三匹配,无人机影像数据相对定向成果可优于0.3个像素,尤其在已知少量控制点的基础上,利用飞机自带RTK、PPK为影像提供较为精确位置信息,用于辅助加密测区的区域网平差计算,完成测区绝对定向工作。
通过Pips空三云系统,完成影像预处理、空三工程组建、同名点提取、相对定向、像控点刺加、绝对定向等空三加密步骤,为后续DLG生产提供可靠空三成果。
3.5 DLG生产
测区经过空三加密之后,输出高精度空三成果,利用Pips测图云V2.0系统,在立体像对上进行数字线画图采集。按照地形图图式要求采集地形等要素。并使用该软件“扣房檐/快速房檐改正”功能,室内进行立体屋檐改正,并进行楼层注记。最后将外业调绘的数据经内业编辑处理后形成最终成果数据。
充分利用低空航飞影像分辨率高的特点,配合使用Mapping.Pips云系统的内业房檐改正等功能,使得原外业调绘过程中的屋檐宽度、楼层等工作量可以大幅度缩减,同时可以大大提高成图精度。
3.6 成果精度分析
外业在测区A范围内选取了83个房角地物点,测区B实测241个房角地物点,作为地形图平面检测点,使用RTK布设图根控制点,利用全站仪实测检核点坐标。其中测区A检测平面中误差为 3.3 cm,最大较差为 8.0 cm,测区B检测平面中误差为 3.5 cm,最大较差为 14.3 cm。检测分析如表2所示,点位较差占比如图6所示。

点位较差分布表 表2
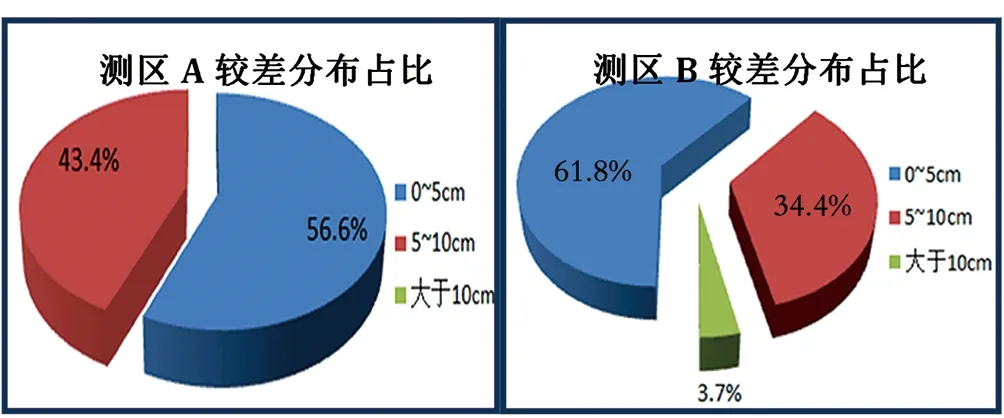
图6 点位较差分布占比图
4 结 语
本文通过对山区农村村镇和城市高层小区两个不同类型测区的成果分析,以消费级旋翼机和专业级固定翼无人机为飞行平台,结合 Pips.Cloud专业航测后处理软件,验证说明了无人机航测可以达到高精度(平面中误差 ≤5 cm)测绘的可行性。通过试验,得出以下结论:基于无人机数码航摄及相关的无人机航测处理系统,主要地物界址点平面精度可以达到中误差 ≤5 cm精度要求。
内业采集只在立体像对下作业,无须建模,采用Pips.Cloud系统-“内业缩房檐”的技术优势,基于Pips测图云系统的“扣房檐/快速房檐改正”功能,在立体采集模式下,通过切换相邻像对,调整光标高度至可观测建筑物墙面任意高度,光标点击建筑物墙面,屋檐宽度会自动改正到光标位置。通过以上功能,90%以上建筑房檐无须外业调绘即可内业立体改正,房屋层数及建筑名称等可直接通过高分辨率的立体影像判读,大大缩减外业调绘工作量,极大提高工作效率和成图精度。
综上所述,本技术方案获取的产品平面精度可以满足村镇地籍、城市规划测量精度要求,可在高精度的竣工测量、不动产测绘、地籍图测量等工程测量项目中应用,完全满足大比例尺地形图规范要求精度。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
动漫界·幼教365(中班)(2020年7期)2020-07-14
东坡赤壁诗词(2019年5期)2019-11-14
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
企业科技与发展(2018年5期)2018-09-10
意林·少年版(2018年12期)2018-07-04
