
基于共享联结三元组卷积神经网络的枪弹膛线 痕迹快速匹配方法
2021-07-25 16:30潘楠潘地林潘世博刘海石蒋雪梅刘益
河北科技大学学报 2021年3期
关键词:卷积神经网络
潘楠 潘地林 潘世博 刘海石 蒋雪梅 刘益

摘 要:针对传统通过激光检测提取膛线线形痕迹信号时枪彈痕迹检测精度不高且操作复杂的问题,提出了新型提取和处理方法。采用多尺度配准、弹性形状度量与卷积神经网络技术,基于多模式弹性驱动自适应控制方法,建立了试件末端位置和姿态参数分布模型,采用孤立森林算法检测信号进行异常处理,利用变尺度形态滤波算法去除非细小特征,引入平方速度函数优化弹性形状度量算法,完成曲线轮廓嵌入层映射;在膛线线形匹配部分,建立了适用于痕迹特征的优化参数共享联结三元组卷积神经网络模型,通过嵌入层相似度计算和最小化三重损失函数训练该网络至收敛;最后进行了不同方法的相似度匹配对比实验。结果表明,与传统的检测方法相比,新方法解决了传统枪弹痕迹检测中面临的精度与操作性问题,保证检测结果的稳定性,且成本大大降低。在膛线线形痕迹提取中采用多模式弹性驱动自适应控制方法和三元组卷积神经网络模型,可为枪弹痕迹检测提供一种新的可行方法和思路。
关键词:测试计量仪器;枪弹痕迹;多尺度配准;弹性形状度量;三重损失函数;卷积神经网络
中图分类号:TP183 文献标识码:A
doi:10.7535/hbkd.2021yx03002
Fast matching method of bullet rifling traces based on shared connection triplet convolutional neural network
PAN Nan1, PAN Dilin2, PAN Shibo1, LIU Haishi1, JIANG Xuemei3, LIU Yi4
(1.Faculty of Civil Aviation and Aeronautics,Kunming University of Science and Technology,Kunming,Yunnan 650500,China;
2.Kunming Zhiyuan Measurement and Control Technology Company Limited,Kunming,Yunnan 650500,China;
3.Institute of Forensic Science of China,Beijing 100038,China;4.Kunming SNLab Technology Company Limited,Kunming,Yunnan 650228,China)
Abstract:Aiming at the problems of low precision and complicated operation of traditional bullet trace detection which generally uses laser to detect rifling traces to extract the signal of the rifling traces,new extraction and handling method was provided.By adopting multi-scale registration,elastic shape measurement and convolutional neural network technology,and using multi-mode elastic drive based adaptive control method,the end position and attitude parameter distribution model of the specimen were established.At the same time,the isolated forest algorithm was used to detect the signal for anomaly processing,and the variable-scale morphological filtering algorithm was used to remove non-small features.The square velocity function was introduced to optimize the elastic shape measurement algorithm to complete the curve contour embedding layer mapping.Aiming at the matching part of the rifle line shape,a convolutional neural network model of optimized parameter sharing connection triples suitable for trace features was established,and the network was trained to convergence by calculating the similarity of the embedding layer and minimizing the triple loss function.The comparison of similarity matching experiment results by using different methods was conducted.The results show that the new method solves the accuracy and operability problems faced in the traditional bullet trace detection,the stability of the detection result can be guaranteed,and the cost is greatly reduced compared with the traditional detection method.Adopting multi-mode elastic drive adaptive control method and three-tuple convolutional neural network model in the extraction of rifling traces provides a new feasible method and idea for bullet trace detection.
Keywords:
test and measurement instrument;bullet trace;multi-scale registration;elastic shape metric;triplet loss function;convolution neural network
枪弹膛线痕迹是指弹头在挤进过程中,受到线膛内表面的挤压和剪切、刮擦作用在披甲表面形成的凹陷条状痕迹(线形痕迹)。由于枪管内阴、阳膛线对弹头披甲挤压力大小不同及阳膛线2棱边侧面对披甲的剪切、刮擦作用,致使弹头披甲与阳膛线表面直接接触的部位产生压缩变形,而呈凹陷状,从而明显地区别于阴膛线表面作用的部位[1]。在涉枪案件侦破过程中,弹头膛线线形痕迹最为常见,其对于办案人员认定案件性质,确定作案枪支,进而证实犯罪嫌疑人有着十分重要的意义[2]。
相较于传统通过显微镜观察、人为比对形态特征的方式,近年来兴起的图像识别及三维扫描技术,为膛线线形痕迹的无损定量测试提供了一些新的解决方案。
国外诸多研究者就此问题提出了许多解决方法。美国爱荷华州立大学提出了一种基于线形痕迹轮廓数据对犯罪枪支进行推断[4];利用显微镜进行线形痕迹提取,芬兰、美国和德国的研究者分别着重于利用三维显微镜的扫描白光干涉[5],利用白光共聚焦显微镜[6]和基于三维激光扫描共聚焦的方式进行提取[7],此类通过三维光学仪器提取线形痕迹轮廓的方式具有很高的精度,但是在实施过程中十分复杂,需要足够的技术力。而关于擦划线形痕迹,德国、荷兰和美国爱荷华州立大学的研究者通过相关分析计算2个沟槽的关联程度[8],构建了一种针对线形痕迹的多尺度配准框架[9]和使用MANTIS处理软件对提取痕迹轮廓图像进行比对的方法进行研究[10]。
在国内,杨敏等[11]通过构造枪弹膛线痕迹纹理局部小波能量特征矢量并衡量特征标准差实现痕迹相似度检验,同时提出使用扩展分形模型描述弹头膛线区域痕迹,给出了相关算法[12]。李轶昳等[13]尝试建立一种射击弹头、弹壳三维形貌以及痕迹特征的复制方法——枪弹物证模塑成型技术,但是成本不易控制。哈尔滨工业大学利用归一化互相关函数与全元匹配结合的算法实现了线形痕迹的高效匹配[14]。李赵春等[15]尝试利用特征识别加速鲁棒特征(SURF)算法进行匹配研究,利用该算法提取弹痕表面特征建立三维模型,并使用随机抽样一致性(RANSAC)算法实现匹配优化。中国人民公安大学在Evofinder枪弹痕迹比对系统的基础上,探究似然比在枪弹痕迹评估中的计算与评价方法,并尝试建立以似然比方法为基础的枪弹痕迹比对系统证据评估体系[16]。张馨[17]利用高分辨率的3D点云数据和二维图像复合的方法重现弹头膛线痕迹的三维特征。
以上方法虽然都在一定程度上实现了线形痕迹的自动匹配,但仍存在以下问题:
1)基于图片的比对方法,对拍照设备的要求较高,反光、拍摄角度及对焦不一致,将直接导致原始数据失真,分析结果稳健性下降;
2)三维扫描稳健虽能更真实地反映线形痕迹细节特征,但其检测硬件成本高昂,且形成的文件体积过大,易造成计算量级呈几何倍数增长;
3)现有匹配方法在区分枪支本身个体特征的同时需要区分类特征和子类特征,对于因枪支击发次数较多而造成形态复杂且随机性较大的线形痕迹,其准确性较为有限。
单点激光测试具有受环境光影响小、精度高、数据文件体积小、频响特性好等特点,对于微观特征的非接触式测量非常有效[18]。近年来深度学习领域兴起的卷积神经网络,其权值共享网络结构可规避传统识别算法中复杂的特征提取和数据重建过程,同时足够稳健,对于平移、比例缩放、倾斜或者共他形式的变形具有高度不变性,已被广泛应用于图像和语音识别之中[19-22]。因此,将单点激光测试与卷积神经网络相结合,应用于线形痕迹相似性匹配,不啻为一种可行的尝试。然而,在解决实际问题时仍然需要面对保证检测信号稳定性、痕迹特征快速提取、稳健训练数据集选取、部分重合相似性识别等问题。
针对上述问题,本文利用基于多模式弹性驱动自适应控制方法保证弹头的旋转轴线与电动旋转台的旋转轴线始终重合,使得测试信号具备长期稳定性;针对线形弹痕则采用有限元分析、三维扫描和单点激光检测实验相结合的方式,完成线形痕迹特征的采集,形成机理分析、确定高区分性形貌特征分布并建立激光检测信号与实际形貌特征的近似等价关联关系;对于异常数据的检测与处理,采用了基于孤立森林和指数加权移动平均算法;在滤波方面采用基于变尺度形态滤波算法去除非细小特征;通过多尺度配准策略完成曲线轮廓的快速提取;采用优化弹性形状度量算法完成轮廓嵌入层映射;最终的匹配部分采用痕迹特征参数共享的联结三元组卷积神经网络完成样本特征提取、训练及相似性识别,利用平均精度均值和接收者操作特征曲线完成相似性匹配排序标准的构建,实现弹头膛线痕迹快速检验。
1 痕迹微观形态与激光检测信号等价关系的建立
1.1 保持檢测弹头与电动旋转台同轴
假设激光传感器到弹头表面的垂直距离为L,到电动旋转台轴心的距离为H,弹头轴心至电动旋转台轴心距离为δ,弹头半径为r,电动旋转台轴心与弹头表面的垂直距离为S,如图1所示。
在电动旋转台进行360°旋转时有:
L=H-δsin α±δ2sin2α-δ2-r2。(1)
基于多模式弹性驱动自适应控制方法构建试件座末端(与弹头底部重合)位姿参数分布模型,分析试件座位姿调节的约束参量,将试件座位姿调节的稳态控制问题转化为试件座位姿参量自适应调节问题,实现试件座姿态变换的特征分解和误差补偿修正,从而保证弹头旋转轴线与电动旋转台的旋转轴线始终重合,使得测试信号具备长期稳定性。
1.2 典型制式公务用枪和对应弹头膛线有限元模型的建立
通过有限元仿真定量分析其弹头披甲初始挤进枪管时在膛线和坡膛的碰撞与挤压作用下产生弹性变形,挤进过程中产生的应力变化趋势,以及最后挤进全深膛线时发生的塑性变形。据此建立弹塑性有限元模型,通过分析等效应力图、膛线X方向主应力图和膛线应力偏张量图等计算确定出应力集中点、变化过程以及强度薄弱区域,分析膛线痕迹的产生、演变机制和相应模态特征。某弹头膛线痕迹有限元模型见图2。
将有限元计算结果和三维激光扫描共聚焦显微镜测取线形痕迹表面凹凸痕迹的微观数据相结合,根据枪弹类型、痕迹起止部位,确定膛线加工明显留痕区域和特征表现。利用单点激光检测对留痕区域进行多次环绕检测,最终结合三维扫描模型建立其与线形痕迹微观形态的近似等价关联关系。图2中Z轴为激光头到弹头表面凹凸的距离,单位为μm;X轴为环绕弹头扫描一周的长度,单位为mm;Y轴为扫描的信号个数,5 000个组成一个面。
2 痕迹曲线轮廓提取及嵌入层映射
2.1 检测异常数据处理
检测异常数据处理,异常数据多由过分反光或振动造成,同周边的数据有明显差异,以单点激光检测信号作为测试数据输入,基于孤立森林算法,在训练集上使用子采样建立多棵iTree,創建iForest,评估样本(实例),计算所有样本的异常指数,对所有的一维数据异常指数进行K均值聚类,估算当前差异阈值,低于此阈值的样本即为异常,予以剔除,基于临近正常数据通过指数加权移动平均进行修正。
2.2 多检测数据相位同步及非特征信息去除
利用改进动态时间规整算法和皮尔森相关系统,将10条检测信号进行相似度比对,取相似度最大点为相位起始点,进行数据叠加,随后构建变尺度形态滤波器,保留细小区分特征信息,去除非特征信息。
2.3 曲线轮廓快速提取
多尺度配准策略用于配准经同型号不同枪支形成痕迹信号的轮廓(已知不匹配配准)及相同枪支不同夹持力、击发力而形成痕迹信号的轮廓(已知匹配配准),分多步配准,每步均增加细节信息,从粗略结构开始,对于每个尺度只考虑大于给定波长λ的结构,在每个步骤中,确定最佳平移和缩放参数并将其作为下一步的初始化,最后一步形成的参数用于转换包括所有结构的整个轮廓,以产生最终的配准结果,如图3所示。
2.4 曲线轮廓映射到嵌入层
设参数化曲线轮廓为β(β:D→瘙綆n),其中D是参数化的确定域,瘙綆n为实数集,定义‖·‖为瘙綆n中的欧几里得2范数,定义连续映射F:瘙綆n→瘙綆n,利用平方根速度函数定义β的形状q:D→瘙綆n,其中:
q(t)=Fβ·(t)=β·(t)‖β·(t)‖。(2)
对于每一个q∈L2D,瘙綆n,均存在能够通过q的平方根速度函数定义的β,此曲线通过β(t)=∫t0qs‖qs‖ds获得,随后通过∫D‖q(t)‖2dt=∫D‖β·‖2dt=1将曲线缩放至单位长度以实现尺度不变性,表示为该预形状空间L2D,瘙綆n中的单位超球点;最后,通过由预形状空间中点与点之间最小化测地线的长度定义2条曲线之间的距离,测地线通过解析表达式和路径矫正算法进行计算,分别基于奇异值分解和动态规划实现该预形状空间旋转和重新参数化不变性。
3 痕迹相似性匹配卷积神经网络模型的建立
3.1 三重损失和相似度计算
相似度计算步骤如下:从训练数据集(空间)中随机选一个样本xp1,再随机选取一个和xp1属于同一类的样本xp2和不同类的样本xn,由此构成一个T=xp1,xp2,xn三元组,f(xi)为归一化的高度嵌入特征,嵌入层的维度通过网络分支最后一层的大小进行控制,最后可构成一个基本的卷积神经网络结构,如图4所示。本文的卷积神经网络利用相似性匹配方法,构建了一个10层的卷积神经网络模型来完成弹痕匹配。
将所有样本之间的距离均加以利用,使用Softmax层和均方根标准实现Δ+同时满足小于Δ1+且小于Δ*=minΔ1-,Δ2-的条件,以简化训练样本选择过程,将损失定义为
(T)=eΔ+eΔ++eΔ*2+1-eΔ*eΔ++eΔ*2 。(3)
将L2范数用于评估痕迹在嵌入层中表征之间的距离,利用损失函数使匹配痕迹之间局部差异值最小,完成相似度计算。
3.2 三元组选择和数据增强
本文卷积神经网络的三元组选择分别为评估全轮廓、轮廓重排列、轮廓分段和补丁4类策略,通过实际测试选择最为合适的策略,以隐式地定义相关特征以及应被卷积神经网络所抑制的特征,避免因卷积神经网络内权值共享而导致全部样本被抑制或仅因局部特征区分样本的情况出现。
3.3 卷积神经网络结构优化和排序标准建立
由于输入样本是一个轮廓,因此卷积和池化层是一维信号输入。在各卷积层之后进行批量归一化,以减少对网络的输入规范化和初始化的依赖性,通过经验性实验评估卷积大小、映射数量以及池化层大小以防止过拟合,同时引入平均池和ReLU激活函数加快训练速度并降低梯度消失带来的影响。利用随机梯度下降进行优化,最终利用训练好的痕迹特征卷积神经网络模型进行相似性识别。采用平均精度均值和接收者操作特征曲线构建相似性匹配排序标准,综合评估分类和识别结果。具体层数的作用如表1所述。
4 实验测试
1)击发弹头积累 选取自动步枪、冲锋枪、手枪3大类总计5种型号枪支50支,安装在仿生危险枪支射击架上,进行多角度射击实验,通过干式无损集弹器回收。板机击发力按1.0,2.0,5.0,7.0和10.0 kg等5级进行调节,前后夹持力按5,10,20,50和70 kg进行调节。每支枪支射击25次,形成待测弹头1 250个,每次射击均记录子弹出膛速度。
2)训练集积累 为了能够更好地进行训练,要求痕迹检测样本的数量尽量大,利用单点激光检测,对各弹头披甲表面留痕区域进行10次环绕检测,积累单点激光检测信号样本库,样本库样本数量(测试集)达到12 500。
3)弹头轴线中心自适应校正 利用基于多模式弹性驱动自适应控制方法保证弹头的旋转轴线与电动旋转台的旋转轴线始终重合,使得测试信号具备长期稳定性,避免因倾斜产生数据偏差。
4)弹性形状度量 利用弹性形状度量算法对检测信号进行曲线轮廓映射,通过由预形状空间中点与点之间最小化测地线的长度定义2条曲线之间的距离。
5)实施细节 通过计算嵌入层痕迹映射之间的L2距离计算相似度。对于轮廓段,使用滑动窗口从上到下计算多个表征。然后,将相应表征的成对距离之和用作2条痕迹之间的距离度量,将步长设置为段或补丁高度的1/8。
优化参数通过多次实验后得以确定:使用随机梯度下降法进行优化,学习速率为0.000 1,权重衰减为10-4,动量设定为0.88。
6)编写程序 相关算法利用Matlab 2019a验证后,采用Python进行编写,在CPU为Intel Core i7 3.2 GHz、双1080Ti GPU的深度学习计算主机上运行。
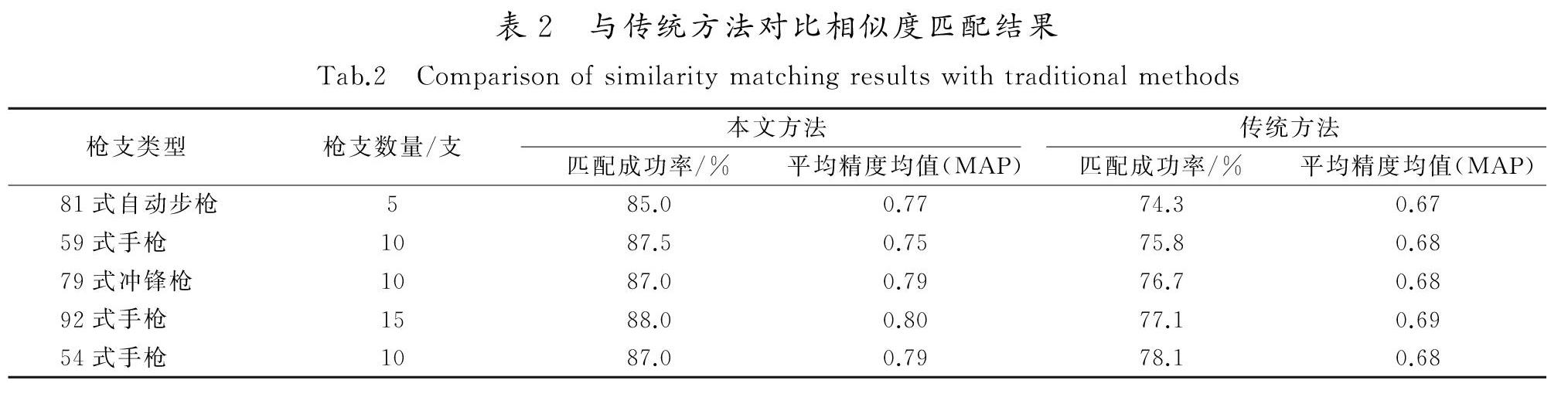
将该方法与传统方法作比较,约定同一类型枪所击发的比对排序全部位于前10%,也就是前9位的,则匹配为优秀,有6组数据比对排序在前10%,则该比对结果记为良好(成功),结果见表2。
单个弹头全测试集匹配时间为0.1 s,经实验,81式自动步枪弹痕匹配成功率为85.0%(MAP 0.77),59式手枪弹痕匹配成功率为87.5%(MAP 0.75),79式冲锋枪弹痕匹配成功率为87.0%(MAP 0.79),92式手枪弹痕匹配成功率为88.0%(MAP 0.8),54式手枪弹痕匹配成功率为87.0%(MAP 0.79),整体匹配准确率和稳健度与传统方法相比较都要优越。
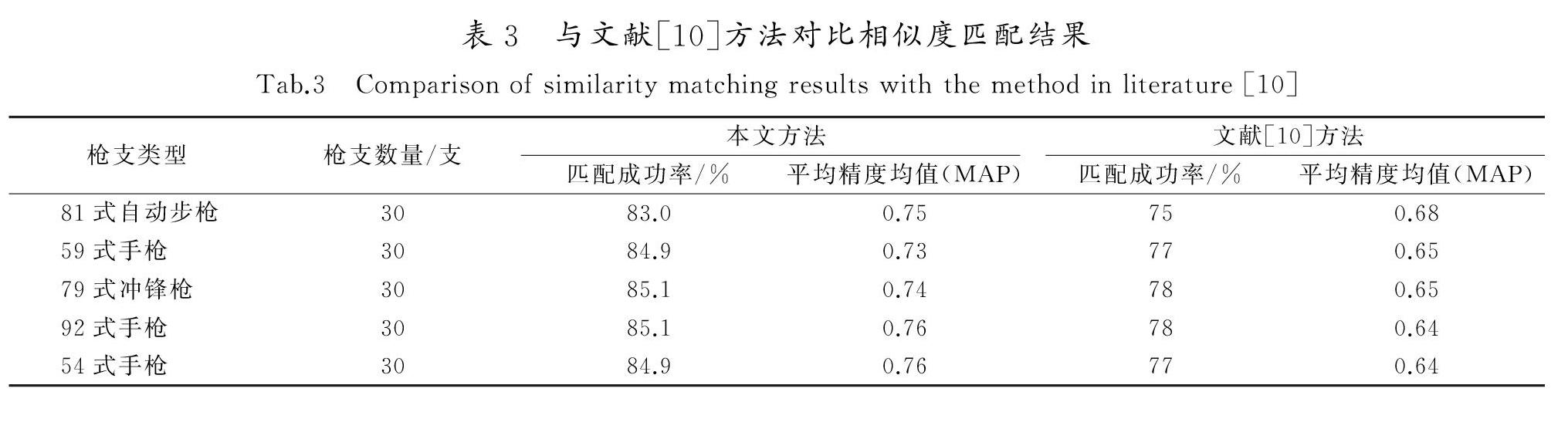
为与本文方法进行对比,采用文献[10]提出方法对测试集进行匹配测试。与传统方法的对比试验相比较,本次增加了每个种类的枪支数量,单个弹头全测试集匹配时间为1.5 s。由表3可知,本文所提出的方法在匹配速度、精确度和稳健度方面均优于文献[10]方法。
5 结 语
提出了一种基于卷积神经网络的枪弹膛线痕迹相似度匹配算法。该算法基于多模式弹性驱动自适应控制方法,保证弹头的旋转轴线与电动旋转台的旋转轴线始终重合,采用有限元分析、三维扫描和单点激光检测实验相结合的方式,建立激光检测信号与实际形貌特征的近似等价关联关系;采用基于孤立森林和指数加权移动平均算法完成检测异常数据处理,基于变尺度形态滤波算法去除非细小特征;采用多尺度配准策略,完成曲线轮廓的快速提取;采用优化弹性形状度量算法,完成轮廓嵌入层映射;采用痕迹特征参数共享的联结三元组卷积神经网络,完成样本特征提取、训练及相似性识别,利用平均精度均值和接收者操作特征曲线完成相似性匹配排序标准的构建,最终实现了弹头膛线痕迹的快速检验,实际数据测试也验证了算法的有效性。为了进一步贴近实际办案环境,如何扩大样本库和算法运算速度,将是下一步的研究方向。
参考文献/References:
[1] SPOTTS R,CHUMBLEY L S,EKSTRAND L,et al.Optimization of a statistical algorithm for objective comparison of toolmarks[J].Journal of Forensic Sciences,2015,60(2):303-314.
[2] 李岳松,罗亚平.运用Evofinder枪弹自动識别系统对建档手枪弹头数字化建档的研究[J].刑事技术,2018,43(5):363-368.
LI Yuesong,LUO Yaping.Digital filing into the registered-bullet imaging database by ballistic identification system evofinder[J].Forensic Science and Technology,2018,43(5):363-368.
[3] 张树江,颜景龙,邢慧.一种基于图像检索的枪弹识别系统[J].兵工学报,2008,29(4):459-463.
ZHANG Shujiang,YAN Jinglong,XING Hui.A cartridge identification system based on image retrieval[J].Acta Armamentarii,2008,29(4):459-463.
[4] LOCK A B,MORRIS M D.Significance of angle in the statistical comparison of forensic tool marks[J].Technometrics,2013,55(4):548-561.
[5] KASSAMAKOV I,BARBEAU C,LEHTO S,et al.CSI Helsinki:Comparing three-dimensional imaging of diagonal cutter toolmarks using confocal microscopy and SWLI[C]//SPIE Defense,Security,and Sensing.Orlando:[s.n.],2010:76900Y.
[6] GAMBINO C,MCLAUGHLIN P,KUO L,et al.Forensic surface metrology:Tool mark evidence[J].Scanning,2011,33(5):272-278.
[7] CLAUSING E,VIELHAUER C.Digitized locksmith forensics:Automated detection and segmentation of toolmarks on highly structured surfaces[C]//Media Watermarking,Security,and Forensics.[S.l.]:[s.n.],2014:90280W.
[8] HEIZMANN M.Techniques for the segmentation of striation patterns[J].IEEE Transactions on Image Processing,2006,15(3):624-631.
[9] BAIKER M,KEEREWEER I,PIETERMAN R,et al.Quantitative comparison of striated toolmarks[J].Forensic Science International,2014,242:186-199.
[10]CHUMBLEY S,ZHANG S,MORRIS M,et al.Development of a mobile toolmark characterization/comparison system[J].Journal of Forensic Sciences,2017,62(1):83-91.
[11]杨敏,彭颖.基于专家知识的工具痕迹系统构建研究[J].中国人民公安大学学报(自然科学版),2013,19(2):1-5.
[12]杨敏,牟丽.弹头痕迹多尺度扩展分形检验分析[J].兵工学报,2009,30(6):677-681.
YANG Min,MOU Li.Multiscale extended fractal analysis for identifying bullet engraving[J].Acta Armamentarii,2009,30(6):677-681.
[13]李轶昳,周志飞,张刚,等.利用高分子材料复制枪弹物证三维形貌及痕迹特征[J].刑事技术,2019,44(6):497-501.
LI Yiyi,ZHOU Zhifei,ZHANG Gang,et al.Ballistic evidence reproduced of its own 3D shape and marks patterns by polymer materials[J].Forensic Science and Technology,2019,44(6):497-501.
[14]ZHANG H,SONG J,TONG M S,et al.Correlation of firing pin impressions based on congruent matching cross-sections (CMX) method[J].Forensic Science International,2016,263:186-193.
[15]李趙春,周骏,张浩,等.基于SURF特征的枪弹痕迹匹配方法[J].传感器与微系统,2019,38(11):35-38.
LI Zhaochun,ZHOU Jun,ZHANG Hao,et al.Bullet scrapping matching method based on SURF feature[J].Transducer and Microsystem Technologies,2019,38(11):35-38.
[16]董锋.Evofinder枪弹痕迹比对系统似然比评估方法研究[D].北京:中国人民公安大学,2020.
DONG Feng.Research on the Likelihood Ratio Evaluation Method of Evofinder Bullet Trace Comparison System[D].Beijing:People′s Public Security University of China,2020.
[17]张馨.基于迁移学习的弹痕比对方法研究[D].合肥:安徽大学,2020.
ZHANG Xin.Research on Bullet Marks Recognition Based on Transfer Learning[D].Hefei:Anhui University,2020.
[18]潘楠,伍星,刘益,等.线性痕迹激光检测信号自适应匹配算法研究[J].仪器仪表学报,2015,36(6):1372-1380.
PAN Nan,WU Xing,LIU Yi,et al.Research on the adaptive matching algorithm for laser linear mark detection signals[J].Chinese Journal of Scientific Instrument,2015,36(6):1372-1380.
[19]PARKHI O M,VEDALDI A,ZISSERMAN A.Deep face recognition[C]//Procedings of the British Machine Vision Conference 2015.Swansea:British Machine Vision Association,2015:1-12.
[20]ZAGORUYKO S,KOMODAKIS N.Learning to compare image patches via convolutional neural networks[C]//2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Boston:IEEE,2015:4353-4361.
[21]IOFFE S,SZEGEDY C.Batch Normalization:Accelerating Deep Network Training by Reducing Internal Covariate Shift[EB/OL].[2020-12-21].https://www.ixueshu.com/document/f8e66fe8224877ea318947a18e7f9386.html.
[22]CHEN W H,CHEN X T,ZHANG J G,et al.Beyond triplet loss:A deep quadruplet network for person Re-identification[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu:IEEE,2017:1320-1329.
猜你喜欢
电子技术与软件工程(2017年3期)2017-03-22
电脑知识与技术(2016年33期)2017-03-21
科技创新与应用(2017年5期)2017-03-16
电脑知识与技术(2016年30期)2017-03-06
科技创新与应用(2016年35期)2017-02-21
计算机应用(2016年12期)2017-01-13
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
软件(2016年5期)2016-08-30
电脑知识与技术(2016年10期)2016-06-16
