
绳索-齿轮混合传动的仿人机器人下肢研究
2021-08-02 10:20徐曼曼陈品品
安徽工程大学学报 2021年3期
张 浩,王 海,徐曼曼,陈品品
(安徽工程大学 机械工程学院,安徽 芜湖 241000)
仿人机器人可以协助人类完成日常任务,但完全参照人体结构进行机械结构设计尚存在一定困难。现有的仿人机器人还不能有效模拟人体结构中存在的诸多冗余自由度和结构之间的强耦合性等特性,因此仿人机器人的运动功能还有一定的局限性。构成人体的关节由多块肌肉驱动,具有非线性弹簧的特性,受此启发,国内外专家学者开始探索绳索驱动的仿生关节研究,这种传动方式具有较好的柔顺性,还能够吸收一定的末端冲击进而保护机构不受损伤。国内绳索驱动机器人的研究方向主要聚焦在绳索并联机构、绳索驱动康复机构和绳索驱动机械臂三方面。颜玉娇等针对绳索牵引并联机器人建立了绳索的直线模型和悬链线模型。吕伟等针对海上船舶起重机的绳索牵引并联机构进行了相关技术研究。甘振波等进行了基于绳索驱动的下肢康复外骨骼设计,制造了实验样机并进行了轨迹跟踪性能试验。日本JSK研究室使用绳索传动机构研制出了较为成熟的仿人机器人Kenzoh;该研究室随后改进了Kenzoh的绳驱动关节刚度调整机构并且加入了张力传感器模块来准确控制关节的转动。美国佐治亚理工学院的Deweerth研究小组研发出一款绳索驱动的、具有髋关节和膝关节两个自由度的仿人下肢单腿结构。
常规的电机驱动的机器人由于电机及减速器结构自重较大,导致机器人的关节运动刚性偏大,运动平顺性不足。为有效解决此问题,综合绳索驱动的柔顺性和齿轮驱动力大的特点,提出一种绳索-齿轮混合传动方案的仿人机器人下肢结构,在不降低关节运动刚度和驱动力的前提下,提高关节控制的柔顺性,进而为下肢康复运动训练提供一种有效的解决方案。
1 绳索-齿轮混合传动的仿人机器人下肢结构设计
1.1 人体下肢运动机理分析
人体下肢运动主要依靠于髋关节、膝关节和踝关节。将下肢简化为九组肌肉,如图1a所示,简化后的肌肉-骨骼模型如图1b所示(髋关节的回转未标出)。
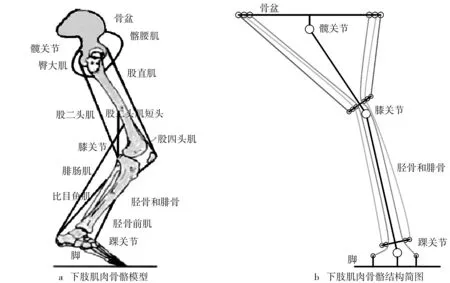
图1 下肢示意图
1.2 仿人下肢机器人结构设计
仿人机器人下肢结构设计采用绳索-齿轮混合传动机构,其中髋关节采用电机驱动以解决关节力臂过短和设计复杂的问题,膝关节采用绳索驱动机构以提高关节运动控制的柔顺性。膝关节采用三点弯曲法控制绳索传动的张力。为了简化理论建模,将绳索看成多个绳索单元的串联组合,每个绳索单元采用质量弹簧阻尼系统建模。
下肢整体结构如图2所示。由图2可知,下肢结构主要包括腰部平台结构、髋关节、大腿结构、膝关节、小腿结构、踝关节、足部。各关节间采用铰链连接,膝关节和踝关节使用十字轴正交结构设计。整体结构设计以简单紧凑、运动不发生干涉为原则。参考人体各部分与身高的比例关系,仿人下肢机器人的高度为0.68 m,腰部宽度0.11 m,大腿长度0.2 m,小腿长度0.15 m,足部高度0.03 m,足部长度0.1 m,足部脚趾关节设置被动阻尼关节。带动绳索收缩的电机及减速器安排在腰部平台上,从而减少脚部的运动惯量,使下肢的运动更加平稳。

图2 下肢机器人结构图
考虑膝关节单自由度且对关节转动精确性要求较高,采用2N型绳索传动构型。每个关节由两根绳索拮抗驱动,通过控制每根绳索的张力调整下肢机构的刚度。从动轮直径为75 mm,导轮组导轮角度为30°。
2 下肢机器人驱动绳索的选取
2.1 绳索动力学理论分析
将绳索看成多个绳索单元的串联组合,对膝关节一侧的绳索进行理论建模,膝关节处绳索驱动机构示意图如图3所示。

图3 膝关节绳索驱动机构示意图
设x
与y
为节点坐标,绳索单元的长度为l
,即
(1)
绳索单元的质量即为两侧节点的质量,即

(2)
式中,ρ
为绳索的线密度;l
为第i
个绳索单元的长度。根据绳索的特性,在质量弹簧阻尼模型中将绳索单元看成无质量的阻尼弹簧,则绳索单元张力,即
(3)
式中,A
为绳索的截面面积;E
为弹性模量;ε
为绳索单元平均应变。第一个节点受到拉力F
和第一个绳索单元的张力F
,即
(4)
第二个节点至第n
个节点主要受到相邻的绳索单元张力,即
(5)
2.2 关节输出速度
关节模块的转动速度和扭矩是设计的重要性能指标,转动速度涉及到下肢机器人控制的快速响应性能,扭矩的大小将直接关系到关节的负载能力。合适的绳索在机械传动时能够使末端关节呈现更好的柔顺性,还能吸收一定的末端冲击,保护机构不受损伤。在1 mm、1.6 mm、2 mm直径的钢丝绳以及0.5 mm的PE大马力绳这四种类型绳索中选取适合的驱动绳索,借助ADAMS仿真软件对不同的绳索驱动膝关节进行动力学分析。关节输出速度具体结果如图4所示。由图4可知,关节平均转动速度都在10 deg/s以上。1 mm直径的钢丝绳较其余两种匀速性能更好,但在传动初期有一定的抖动;选取大马力绳作为传动绳索时,传动初期绳索拉伸变形导致响应速度不够理想,但稳定之后的传动性能较其余规格的钢丝绳更好。
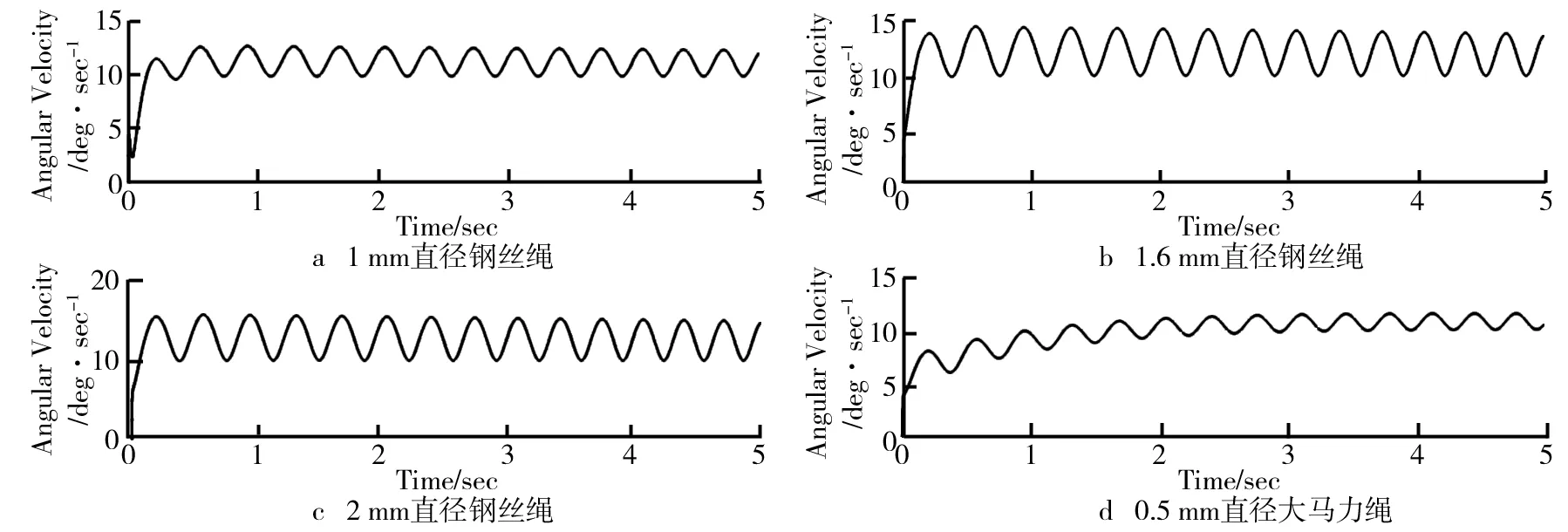
图4 关节输出速度
2.3 关节输出力矩
关节模块设计的转矩指标为1 500 N·mm,关节轮的直径为75 mm,故在输出轮的传动绳索上悬挂约20 kg的重物。绳索动力学仿真结果如图5所示。由图5可知,关节平均转动力矩都在1 500 N·mm以上,输出扭矩会随着下肢机器人的匀速运动而都呈现出相似的规律性的波动。直径越大的钢丝绳较其余两种传递力矩性能更好,但在传动初期均有不同程度的抖动,原因主要是关节齿轮传动中存在咬合间隙;选取大马力绳作为传动绳索时,由于大马力绳的弹性性能较差,在传递力矩的过程中有较大的波动。综合考虑,选取2 mm直径钢丝绳作为下肢机器人的传动绳索。
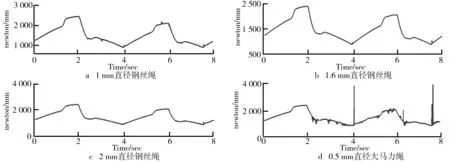
图5 关节输出扭矩
3 下肢机器人的动力学分析
3.1 拉格朗日动力学分析
研究采用二阶拉格朗日方程对仿人机器人下肢单腿结构进行动力学分析。仿人下肢机器人在行走时双腿交替摆动,可以将摆动过程中的单腿看作固连在腰部平台的机械臂。
拉格朗日函数L
被定义为系统结构的动能K
和势能P
之差,K
和P
可以用构建的坐标系来表示。二阶拉格朗日方程为:
(6)

A
、A
和A
点为下肢的髋关节、膝关节和踝关节;m
、m
、m
和m
分别为连杆1、2、3和4的质量(为计算方便以连杆末端点质量表示,实际情况可以以质心处距离计算);d
、d
、d
和d
分别为连杆1、2、3和4的长度;α
、α
、α
和α
分别为广义坐标;A
、A
、A
和A
的坐标分别为(X
,Y
)、(X
,Y
)、(X
,Y
)和(X
,Y
);g
是重力加速度。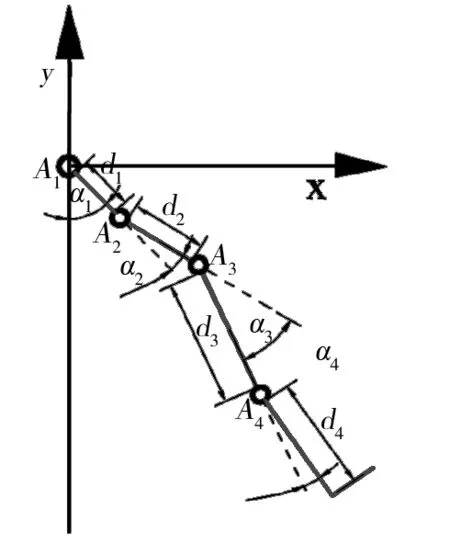
图6 单腿结构简图
连杆1动能与势能为:

(7)
P
=m
·g
·h
=m
·g
[-d
·cos(α
)],(8)
L
=K
-P
,(9)
由式(6)、式(7)、式(8)、式(9)可求得连杆1力矩T
,即(1)在垂直位置和水平位置静止状态下。
T
=(m
+m
)gd
sinα
+m
gd
sin(α
+α
),(10)
(2)以最大恒定速度从垂直位置运动到水平位置。

(11)
3.2 动力学仿真

(1)在垂直位置和水平位置静止状态下的力矩理论数值与仿真数值分别如图7和图9所示。由图7与图9可知,当连杆在垂直位置和水平位置静止状态下时只受重力作用,推导数值与仿真数值在峰值相差306 N·mm,这是因为连杆的质心长度的取值有误差而且仿真过程也存在一定误差。
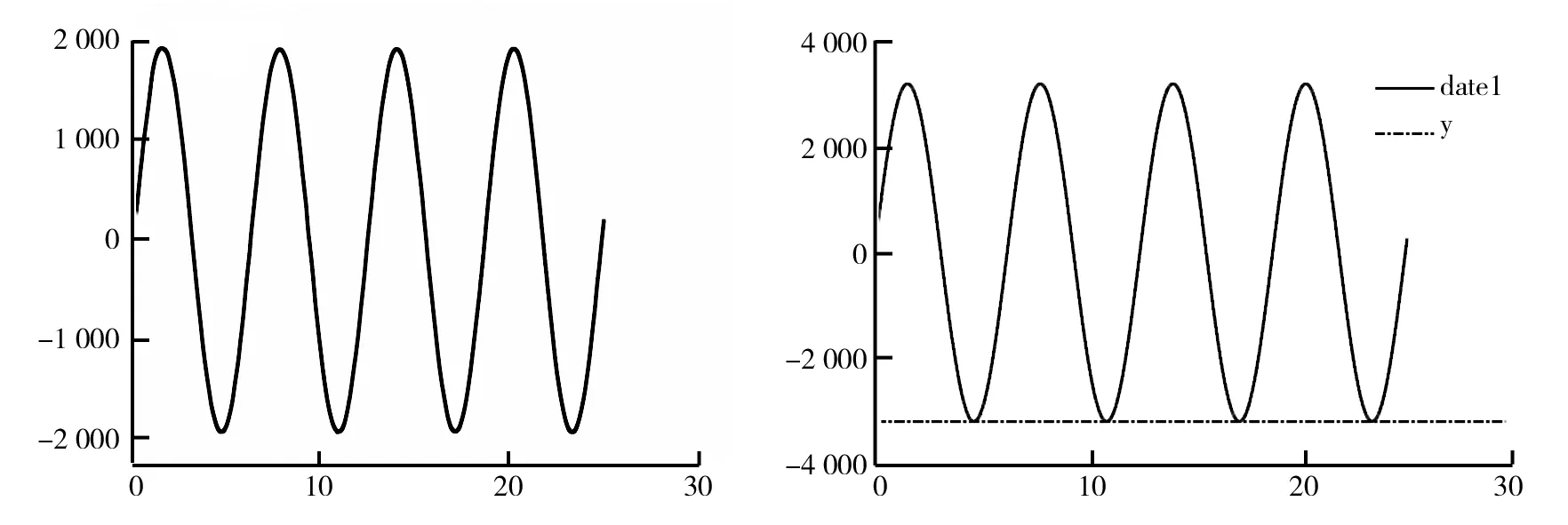
图7 垂直位置和水平位置静止状态下的力矩理论数值 图8 从垂直位置运动到水平位置时的力矩理论数值

图9 垂直位置和水平位置静止状态下的力矩仿真数值
(2)以最大恒定速度从垂直位置运动到水平位置时力矩的理论数值与仿真数值分别如图8和图10所示。由图8与图10可知,当连杆以最大恒定速度从垂直位置运动到水平位置时,理论数值与仿真数值在峰值相差108 N·mm,误差3.36%,说明下肢结构设计合理可靠。

图10 从垂直位置运动到水平位置时的力矩仿真数值
4 结论
针对传统双足机器人的不足,提出了一种基于绳索-齿轮混合传动方案的仿人机器人下肢,其中髋关节采用电机、减速器传动;膝关节、踝关节采用绳索传动。在ADAMS中对不同直径和规格的绳索进行动力学仿真,确定2 mm的钢丝绳为下肢机器人的传动绳索;然后,对简化后的下肢机器人结构进行动力学理论分析与仿真对比,验证了所设计结构的正确性,为以后更进一步的研究打下基础。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
散文诗世界(2022年1期)2022-01-13
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
孩子(2019年7期)2019-07-29
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
山东青年(2016年12期)2017-03-02
哈尔滨理工大学学报(2015年4期)2015-12-31
