
海流计的发展现状及其应用
2021-08-20 06:14乔正明陈超吴姚振朱娟
海洋开发与管理 2021年12期
乔正明 陈超 吴姚振 朱娟

摘要:為解决海流计在实际应用中存在的部分专业术语不规范、译名不统一和归类有差异等问题 , 促进海洋观测仪器的发展和应用 , 文章参照相关标准规范、权威专著和专业文献等资料 , 根据海流计的工作原理和使用性质 , 结合业界实践经验 , 系统梳理各类型海流计的命名、分类、适用范围、特点和发展方向等内容。研究结果表明:海流计可定义为“一种用于测量海水流速和流向的仪器”, 根据工作原理主要分为机械式海流计、电磁海流计、声学海流计和其他海流计4个大类 , 不同类型的海流计各具特性;其中 ,机械式海流计主要包括厄克曼海流计、印刷海流计、照相型海流计、磁录式海流计、遥测海流计和直读式海流计 , 电磁海流计主要包括地磁场电磁海流计和人造磁场电磁海流计 , 声学海流计主要包括声学多普勒流速剖面仪、声学多普勒海流单点测量仪、声学多普勒流速仪和时差式声学海流计 , 其他海流计主要包括激光多普勒测速仪、电阻式海流计、应变片海流计、倾斜式海流计、粒子图像测速仪和海洋湍流剖面仪。
关键词:海流观测;海流计;机械式海流计;电磁海流计;声学海流计
中图分类号:P716;P714 文献标志码:A 文章编号:1005-9857(2021)12-0085-08
Development Status and Application of Current MetersQIAO Zhengming1,CHEN Chao2,WU Yaozhen3,ZHU Juan1
(1.Preparation Office of Zhangzhou base of National Marine Technology Center,Xiamen 361007,China;
2.CSIC PRIDe (Nanjing) Atmospheric &. Oceanic Information System Co.,Ltd.,Nanjing 211106,China;
3.Troops 91001,Beijing 110108,China)
Abstract:In order to solve the problems of nonstandard use of some professional terms, inconsistent translation and different classification in the practical application of current meters, referringto the national standards, industry specifications and relevant literature, combined with the principle and application of current measurement, this paper figured out the naming, classification,scope of application, characteristics and development direction of various types of current meterssystematically, which could also promote the development and application of ocean observationinstruments. The results showed that the current meter could be defined as “an instrument formeasuring the velocity and direction of sea water".The current meters were mainly divided into4 categories: mechanical current meters, electromagnetic current meters, acoustic current metersand other current meters according to the working principle and different types of current metershad their own characteristics. Mechanical current meters mainly included Ekman current meter,printing current meter, photographic current meter, magnetic recording current meter, telemetering current meter and direct reading current meter. Electromagnetic current meters mainly included geomagnetic electromagnetic current meter and artificial magnetic electromagnetic currentmeter. Acoustic current meters mainly included acoustic doppler current profiler, acousticdoppler current single point current measuring instrument, acoustic doppler current meter andtime different acoustic current meter. Other current meters mainly included laser doppler anemometry, resistance current meter, strain current meter, inclined current meter, particle imagevelocimeter and ocean turbulence profiler.
Keywords:Current observation,Current meter,Mechanical current meter,Electromagnetic currentmeter,Acoustic current meter
0 引言
海流是海洋动力环境的重要参数 ,对全球气候稳定、海洋生态系统平衡和海洋开发利用等发挥至关重要的作用 , 因此海流观测技术一直是海洋观测领域的关注焦点之一[1-2]。
为在恶劣的海洋环境下准确和便利地观测海流 ,人类自17世纪开始使用漂流瓶和海冰等漂浮物观测表层海流 , 开启人类观测海流的历史[3]。1905年世界首台机械式海流计—厄克曼海流计问世 ,实现海流测量仪器从无到有、测量范围从浅到深和测量数据从直读到自容的转变[4]。 20世纪70年代末至80年代初 , 首台声学多普勒流速剖面仪(ADCP)实现非接触、无干扰和剖面三维的海流流速测量[5]。20世纪70年代以来 , 随着海洋遥感卫星和海洋观测雷达等技术的不断发展和应用 , 实现对海流的全天候、大范围和不间断观测[6]。经过百余年的发展 , 人类已发明和制造上百种测流仪器 ,获取和积累丰富的海流数据 , 为认知海洋、探索海洋、研究海洋和应用海洋奠定坚实基础。
对于海流计的常用术语、分类和命名等 , 我国虽已颁布多项国家和行业标准规范 ,但在实际应用中仍然存在一些问题。①专业术语的定义未及时更新 ,如随着新型测流方法的补充和扩展 , 海流计的定义未及时更新;②仪器译名有差异 , 如厄克曼海流计[7]有时会被译为埃克曼海流计[8]或艾克曼海流计;③仪器归类不统一,如有时将 ADCP列为声学海流计的种类之一,而有时又将其单独列类。为使海流观测仪器的分类和命名具有连续性和继承性 ,避免出现新的混乱 ,本研究参照相关标准规范、权威专著和专业文献等资料 ,依据海流观测仪器的工作原理和使用性质 , 结合业界实践经验 , 在原有分类的基础上对海流计的相关内容进行梳理和总结 , 以期提供借鉴和参考。
1 海流计的概念和分类
国家专业标准《海洋仪器术语》(ZB Y 188-83)将海流计定义为“测量海流的流速和流向的仪器总称”[7] , 国家机械行业标准《海流仪器测试方法》(JB/T 7480-94)中的海流仪器即海流计[9]。近年来 , 随着海洋遥感卫星和海洋观测雷达等新型测流技术的发展和应用 ,遥感测流已成为海流观测的重要组成部分。对于海洋遥感卫星和海洋观测雷达是否纳入海流计范畴 , 目前鲜有文献提及 , 本研究暂不讨论。为区分遥感测流仪器与海流计 ,建议将海流计的定义改为“一种用于测量海水流速和流向的仪器”[10]更加准确。
根据工作原理 , 海流計主要分为机械式海流计、电磁海流计、声学海流计和其他海流计4个大类[1, 11]。
2 机械式海流计
机械式海流计依据转子或旋桨受水流推动的转速测量流速,并依据磁罗盘确定流向[10,12]。根据水流驱动的惯性元件的不同,机械式海流计可分为2种。①机械转子式海流计,即在水流作用下转子向一定方向只做单向旋转 ,其转速与流速有一定或近似的线性关系,转子分为萨沃纽斯转子和环形转子等;②机械旋桨式海流计 , 即在水流作用下旋桨依水流的正、反方向旋转 , 其转速与流速有一定或近似的线性关系,旋桨分为风车形旋桨和螺旋形旋桨[7]。根据数据记录方式的不同,机械式海流计可分为厄克曼海流计、印刷海流计、照相型海流计、磁录式海流计、遥测海流计和直读式海流计等类型[7,13]。
需要说明的是 , 由于业内对于同类型海流计的称呼有所差异,为不造成新的混乱 , 本研究中的海流计名称均与国家和行业标准规范保持一致 ,若无相关标准规范则参考业内惯称。
2.1 厄克曼海流计[1,4, 10-11]
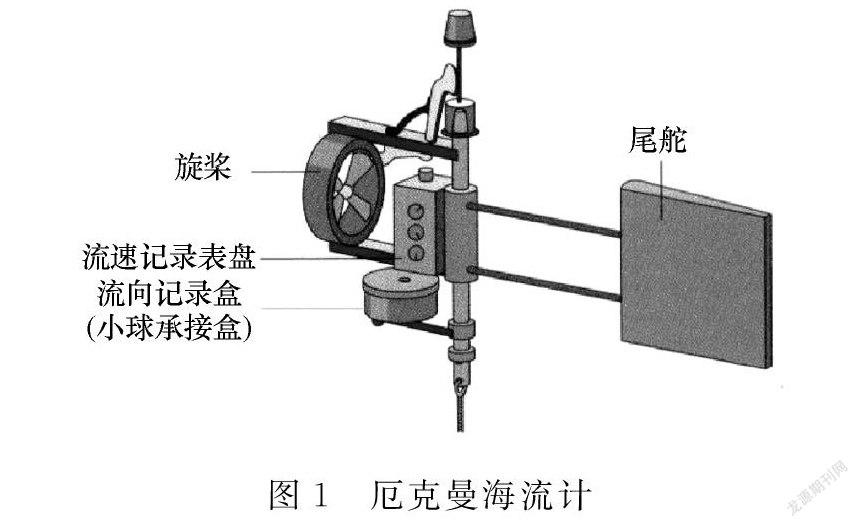
厄克曼海流计是由瑞典物理海洋学家 Ekman 于1905年设计并制造的自容式测流仪器,能够记录给定时间间隔内水流的平均流速和流向 , 由轭架、旋桨、离合器、计数器、记录表盘、承接盒和尾舵等部件构成(图1)。
厄克曼海流计在工作时,通过1个带屏蔽壳体的旋桨和记录表盘测量平均流速,并根据流入承接盒内小球的分布确定流向,其中旋桨的起动速度通常为0.03m/s。流速的最大测量误差为±0.05m/s,流向的测量误差为±(10°~15°)。
厄克曼海流计虽已逐渐退出历史舞台 ,但其基本原理仍被沿用至今。
2.2 印刷海流计[11, 14]
印刷海流计是锚碇船用或浮标用的定点自记测流仪器,能够测量和记录给定时间间隔内水流的平均流速和瞬时流向 , 由外壳和记录机构(包括时间控制系统、齿轮传动系统、字盘和印刷系统)等部件构成。
印刷海流计在工作时,海流推动旋杯,通过记录纸上印刷出来的流速字盘数字得出平均流速,并根据尾舵方向与记录机构内磁针间的夹角确定流向。代表型号包括 SLC61型和 SLC62型,最大使用水深分别为250 m 和1200 m,连续记录时间为2~6个月。流速的测量范围通常为0.03~1.50m/s,相对标准偏差不超过2%,流向的最大测量误差为±5°。
由于数据记录和处理方式较落后,印刷海流计已逐步被淘汰。
2.3 照相型海流计
照相型海流计是锚碇船用或浮标用的定点自记测流仪器,通过1个大直径导流叶轮测量流速,由随海流方向转动的度盘示数确定流向,并以照相方式将测量数据记录在耐压壳内的胶卷上。照相型海流计通常使用宽为16mm、长为15 m 的胶卷,每次大约可记录6000幅照片,测量深度为150 m , 自记工作时间约为30d。
关于照相型海流计的文献资料较少,且该型海流计目前已被淘汰。
2.4 磁录式海流计[15]
磁录式海流计是锚碇浮标用的定点自记测流仪器,通过萨沃纽斯等转子感应将转速转换为电压以测量流速,利用磁通门罗盘等确定流向,并以二进制编码方式或其他方式将测量数据记录在磁带上。仪器的使用深度为1000~6000 m,流速的测量范围为0.03~4.00 m/s,测量误差为±(0.03~0.05) m/s,流向的最大测量误差为±5°。
较常见的磁录式海流计为挪威产的安得拉海流计 ,其是目前世界上使用最广泛的海流计之一。
2.5 遥测海流计
遥测海流计是锚碇浮标用的定点自记测流仪器,通过在自记仪纸带上记录脉冲頻率和相对位置确定流速和流向。仪器上安装双频道无线电遥测装置,包括安装在浮标上的传感器以及安装在船上或岸站的接收装置 , 接收装置能够连续定向接收3个浮标的测流数据。流速的测量范围为0.1~3.6 m/s,最大测量误差为±0.05 m/s, 流向的最大测量误差为±10°,适合短期现场实时观测。
2.6 直读式海流计[10, 16-18]
直读式海流计是能够直接读取测量值的锚碇船用的定点测流仪器 , 主要由水下探测器、水上数据终端和联接电缆构成 , 可测量所在深度海流的流速和流向。海流推动探测器转子或旋桨旋转 , 通过脉冲信号器测量流速;尾舵感应流向 , 并通过磁性同步发信线圈确定流向。仪器的使用深度为150~660 m ,流速的测量范围为0.05~7.00m/s。
因测量数据读取直观、资料整理方便和测量速度快 ,直读式海流计适合短期现场多层次实时观测。我国自主研制的 SLC9-2型直读式海流计代表目前国内机械式海流计研制的最高水平 , 至今仍占有较大的应用市场;最大探测深度为200 m ,流速的测量范围为0.03~3.50 m/s, 最大测量误差为±1.5%FS,流向的最大测量误差为±4°。
2.7 小结
机械式海流计是人类最早应用的海流观测仪器 ,为海流观测作出巨大贡献。其优点主要包括结构简单、成本低、使用方便和稳定可靠 , 缺点主要包括接触测量有扰流、机械转子惯性大、测量精度不高以及无法测量低速流和快速变化的湍流。
随着新型测流仪器的发展和应用 , 机械式海流计不再是主流的测流仪器 , 对其的研究也逐渐减少[10, 13]。目前机械式海流计主要用于对流速测量精度要求不高的场合以及 ADCP等其他类型测流仪器的比测。
3 电磁海流计
电磁海流计利用法拉第电磁感应定律 , 通过测量海水流过磁场时所产生的感应电动势来测量海流。 1948年美国伍兹霍尔海洋研究所利用此原理研制世界首台电磁海流计[19]。根据磁场来源的不同 , 电磁海流计可分为地磁场电磁海流计和人造磁场电磁海流计。
3.1 地磁场电磁海流计[13,20]
地磁场电磁海流计由电缆、电极和记录器等组成 ,根据海流穿过地磁场时的感应电动势实现海流测量。仪器工作时 ,2个电极装在长电缆的末端 ,船只拖着传感器在海面上沿“之”字形路线航行 , 分别测量2个方向的海流分量 , 然后求出海流的矢量大小和方向。地磁场电磁海流计适合走航测流 , 可在航行中大范围和连续地测量表层海流 ,并在较短时间内获取大量海流数据。
根据测量深度的不同 , 地磁场电磁海流计分为深海型(100 m 以深)和表层型。流速的测量范围为0.03~3.00 m/s,最大测量误差为±0.02 m/s, 流向的最大测量误差为±5°。地磁场电磁海流计的优点主要包括可走航自记、水下部件结构简易和可靠性高;缺点为由于其与地球垂直磁场的强度有关 , 不能在赤道附近使用 , 而只适用于地磁垂直强度大于0.1 Oe的海区 ,且受船磁的影响较大。
投弃式海流剖面仪(XCP)是利用地磁场快速测量海流的电磁海流计 , 可测量传感器所在位置的海水流速和流向 ,具有探测海域广、测量深度大、运行周期短、探头体积小、布放形式多样和数据获取及时等优点 ,但流速测量的精度受地磁场分布的影响较大。
3.2 人造磁场电磁海流计[13, 18,21]
人造磁场电磁海流计由壳体(包括球形、环形和盘形等)、激励线圈和接收电极等组成 , 根据海流穿过人工磁场时的感应电动势实现海流测量。仪器工作时 ,通过对其自身的1个环形电磁线圈施加一定频率的正弦交流电 ,使传感器周围产生1个交流磁场 , 当海水流过该磁场时会产生感应电动势 , 传感器通过测量感应电动势确定海水流速和流向。人造磁场电磁海流计适合船用或锚碇定点测流 , 流速的测量范围为0~3.5 m/s, 最大测量误差为±0.01m/s或±2% FS, 流向的最大测量误差为±2°。
人造磁场电磁海流计的优点主要包括受海水深度和海区纬度的限制不大、准确度高、测量数据齐全可靠、体积小、可自容或直读测量、操作简便、无活动部件以及对流场影响小 , 缺点主要包括不能进行剖面测量、能耗高、易损坏、操作繁琐以及易受海水介质电导率和地磁场的影响。目前世界上使用最广泛的人造磁场电磁海流计是美国 Interocean 公司于1983年研制的 S 4型电磁海流计 ,其球形外表可确保当仪器倾斜时不会影响流速测量的准确性;该型电磁海流计不仅可确定海水流速和流向 , 而且可测量波浪、潮汐、海水温度、海水浊度和水质等 ,此外在船上或锚碇的条件下都可进行水下测量工作。
3.3 小结
电磁海流计尤其是人造磁场电磁海流计应用广泛。与传统的机械式海流计相比 ,其无机械磨损部件、使用寿命长、采样方式灵活和启动流速低。此外 , 由于采用矢量平均的测量方法 , 电磁海流计在受风浪影响较大的表层海流和垂直流的测量中具有非常明显的优势[20]。然而电磁海流计存在易受电磁干扰、扰流严重、能耗高和易损坏等问题 ,且海水电导率会随季节或温度的变化而变化 ,从而直接影响测量精度。因此 , 随着现代海流测量精度要求的不断提高 , 后期关于电磁海流计的研究成果较少[12, 16]。
4 声学海流计
声学海流计出现较晚但发展迅速 , 目前已形成多种产品。由于声学海流计的命名(译名)、定义和分类仍存在不一致的问题[7, 16] , 本研究将利用声学原理实现海流测量的仪器统称为声学海流计 , 而用于河道和湖泊等的测流仪器不予讨论。
4.1 声学多普勒流速剖面仪(ADCP)
ADCP(2008年后实施的国家和行业标准规范译为声学多普勒流速剖面仪[22-25])利用声学多普勒原理测量分层水介质散射信号的频移信息 ,并利用矢量合成法获取垂直剖面的海流流速和流向[23]。 ADCP 由换能器阵、壳体、通信端口、数据电缆、采集計算机和软件组成[24] ,流速剖面的最大探测深度为800 m,最大测量层数为128层 ,底跟踪的最大测量深度为1350 m。流速测量范围:直读式和自容式为-4~4 m/s,船用式为-9~9 m/s。流速的测量误差为测量值×1%±(0.005~0.010) m/s,流向的最大测量误差为±5°[23]。
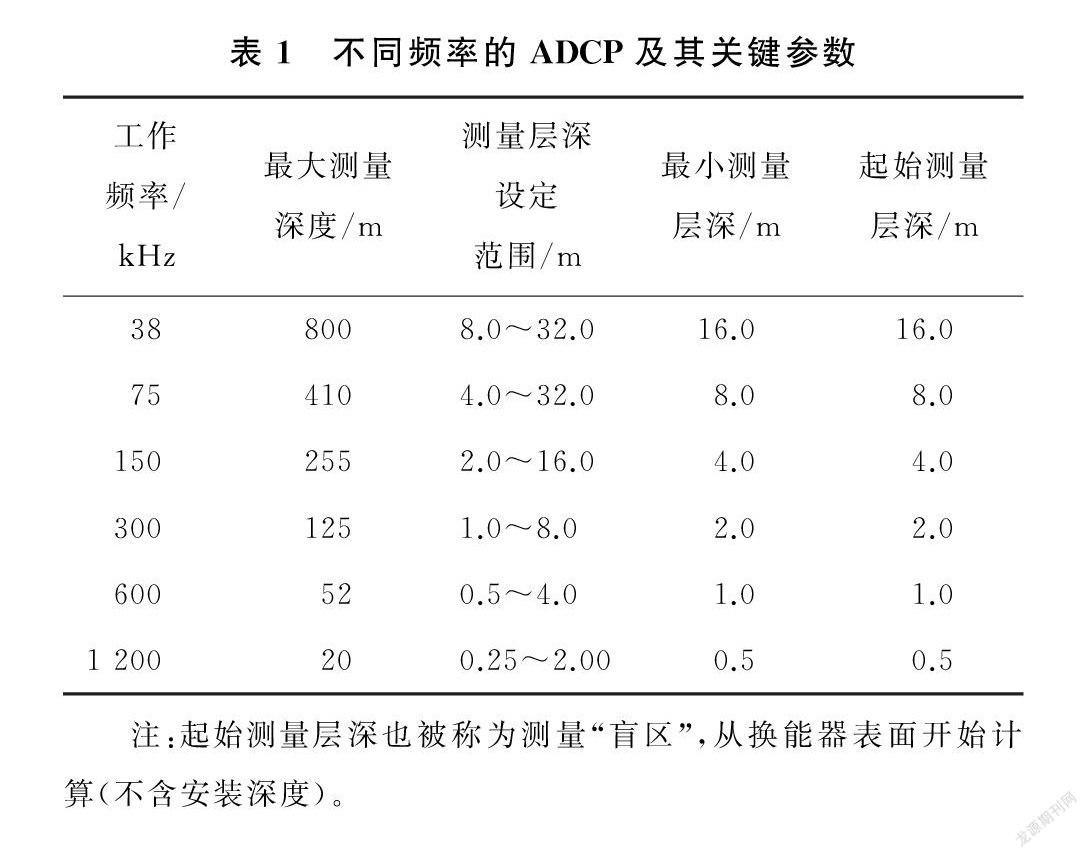
ADCP有多种分类方式:按工作方式可分为自容式、直读式和船用式(走航式) ,按声信号发射、接收和处理方式可分为窄带、脉冲相干和宽带 , 按数据读取方式可分为直读式和自容式 ,按安装方式可分为坐底式、悬浮式、走航式、拖曳式和横向固定式 ,按工作频率可分为38 kHz、75 kHz、150 kHz、300 kHz、600 kHz和1200 kHz(表1)[5,22-23]。
ADCP是近年来发展迅速和应用广泛的快速、经济和有效的新型测流仪器 ,是目前世界上测量多层海流剖面和河道流量的最有效仪器 , 被国际海洋学委员会列为4种先进的海洋观测仪器之一[5]。 ADCP具有测流范围广、不扰动流场、测量用时短、测量精度高以及不存在机械惯性和机械磨损等优点 ,尤其适合流态复杂条件下的测流 , 且可进行流速和流向的三维测量 , 因此被广泛应用于海流和海浪观测以及水声定位导航等领域。目前热带海洋与全球大气计划( TOGA)和世界大洋环流实验(WOCE)等国际大型海洋研究项目都使用 ADCP 进行海流观测。TRDI、Sontek/YSI和 Nortek 是从事 ADCP研发的3家主导公司 , 其研发的船用式、自容式和直读式 ADCP具有技术先进、性能可靠和测量精度高等特点 ,工作频率覆盖38~1200 kHz, 在全球市场占有很大份额。
ADCP的主要发展方向包括测量海流并用于海浪方向谱的计算 ,发展相控阵 ADCP技术以及发展低频声呐阵、作用距离更远且适合测量深海流场的 ADCP技术[26]。
4.2 声学多普勒海流单点测量仪
声学多普勒海流单点测量仪[27](又称多普勒式声学海流计[28]、声学多普勒海流单点海流计或超声多普勒海流计[12])基于声学多普勒频移原理 ,换能器沿窄波束方向发射短波脉冲 ,接收波束在通过水体时由其中的颗粒物散射返回的声信号 ,并利用接收声信号的多普勒频移计算海流流速和流向(图2)。
该型海流计可在锚系或固定状态下 , 在仪器所在深度距换能器0.4~1.0 m 的区域测量流速和流向 ,工作频率为1.9~2.0 MHz, 流速的测量范围通常为0.05~3.00 m/s, 最大测量误差为±0.05 m/s (流速≤1m/s)或±5%读数(流速>1 m/s) , 流向的最大测量误差为±5°(0°~15°倾角)。声学多普勒海流单点测量仪的代表产品是挪威安德拉仪器公司生产的 RCM 系列 ,分为300 m 型、2000 m 型和6000 m 型 ,除可测量仪器所在深度的海流流速和流向外 ,还可观测海水压力、浊度和溶解氧浓度等要素 , 自记时间最长可达2年 ,并因体积小、能耗低、技术先进、测量精度高和安全实用而得到广泛应用[29]。
4.3 声学多普勒流速仪(ADV)
ADV(又称聚焦式声学多普勒海流计[1,28] , 根据英文直译为声学多普勒流速仪[10,30])利用声学多普勒原理 ,能够高精度和高分辨率地同时测量流速和水压[30] , 由换能器(包括1个发射换能器和3个以一定角度均匀分布在发射换能器周围的接收换能器)、罗盘、倾斜仪以及压力和温度传感器组成。仪器工作时 , 由发射换能器垂直于仪器坐标系发射1个波束宽度很窄的高频短脉冲信号 , 该信号被水体中的颗粒物散射后由3个接收换能器接收 , 通过解析和处理3个接收信号的多普勒频移确定海流流速和流向[28]。
ADV是近年来逐渐发展的新型声学海流计 ,具有不破坏流场、响应速度快、测量精度高、可测量三维流速和低流速以及可反演波浪和悬沙浓度等信息[30-31]的优势 ,且因可测量近底海流而成为研究海洋近底异重流的重要工具[28]。然而 ADV易受外界环境干扰 ,水体气泡、大颗粒悬浮物以及边界回声和脉动强度等因素都会影响其测量的准确度[30]。 ADV 的代表产品主要由美国SonTek公司和挪威 Nortek公司研制 , 其中挪威 Nortek公司研制的 Vector系列的流速测量精度最高 , 流速的测量范围为0.1~7.0 m/s,最大测量误差为测量值×0.5%或±1mm/s,流向的最大测量误差为±2°。
4.4 时差式声学海流计
时差式声学海流计(又称声学时差海流计[10]或超声时差海流计[12])通过2对正交的换能器构成仪器坐标系 ,分别测量海流在仪器坐标系上的投影分量 ,再将投影分量通过矢量合成计算流速[12,28] , 并通过内置罗盘和倾角传感器确定流向。与其他声学海流计不同 ,时差式声学海流计相对的2个换能器通过测量声波在顺、逆流时的传播速度和时间差计算流速(声波在海水中传播时 , 在传播距离相同的情况下 ,逆流声波比顺流声波所用时间长[32]) ,其测量仅依靠水体传播声波的能力而与其他因素无关 , 因此在清水或浊水中都能有效测量流速[32]。
时差式声学海流计的优点主要包括测量精度高和不受散射体的限制 , 缺点主要为轻微的扰流会对测量结果产生一定的影响[12,32]。时差式声学海流计的代表产品是美国 FSI公司生产的 ACM- PLUS,流速的测量范围为0~6m/s,最大测量误差为测量值×1%±0.005 m/s, 流向的最大测量误差为±2°[12] , 可测量二维或三维流速 , 并可搭载电导率、压力和温度传感器。
4.5 小结
以 ADCP为代表的声学海流计是近代发展起来的新型物理海洋观测仪器 , 在业内迅速发展和应用 ,并很快成为海流观测的“主力军”。其中 , 以声学多普勒效应为测量原理的声学海流计可走航和定点观测 ,具有使用范围广、不破坏流场、测量精度高和可测三维流速等特点;以声波传播时间差为测量原理的声学海流计不依赖水中散射体 ,具有测量精度高、频率响应好以及可测三维流速和弱流等特点。然而声学海流计存在测量“盲区”,且受水声技术、信号处理和换能器制造工艺等发展水平的限制 ,海水温度、盐度、悬浮颗粒、声学散射体和多径传播等因素也会导致其测量精度下降。
5 其他海流计
5.1 激光多普勒测速仪(LDV)
LDV根据激光多普勒原理 ,利用被测流体中的散射粒子对入射光进行散射 ,并通过光电探测器探测散射光的频移量 , 依次计算被测流体的流速[32-33]。该型海流计具有动态响应快、空间分辨率高、测量范围大、可非接触测量和实时性佳等优点[34] ,但测量精度易受海水浊度的影响 , 因此多用于实验室流场试验分析[1] , 同时被广泛应用于能源、水利、化工、醫疗、冶金、钢铁、航空、机械制造和汽车制造等行业[34]。
5.2 电阻式海流计
电阻式海流计(又称热线海流计[33])利用海流对热敏电阻线的降温作用实现测流。不同流速的海流在流经加热电阻丝时 , 电阻丝(通常选用镀铂钨丝)的热损耗与流速形成一定的关系 , 通过此对应关系可测量流速。电阻式海流计的优点是可测瞬时流和低速流、测量精度较高以及可遥测 , 但由于在海水中须随时清除热线表面的污垢 , 使用不便 , 当前未见于实际应用[3,33]。
5.3 应变片海流计
应变片海流计的测流原理是当海流经过应变片时 ,应变片的压力会产生变化 , 且这种变化与流速形成一定的关系 , 通过测量这种变化实现对海流的测量[33]。目前该项技术尚处于研究试验阶段[1]。
5.4 倾斜式海流计
倾斜式海流计利用海流推动加速度计装置 , 根据加速度的变化得到倾斜角 , 再利用流速与倾斜角的变换公式得到流速值 ,从而实现流速测量。该型海流计由浮力球、加速度计装置、磁力计和存储器等组成 ,可实现定点、自记和长期的海流观测(图3)[35]。
目前国内对于倾斜式海流计的研究很少 , 而国外研制的倾斜式海流计仅适用于长期的海底流观测 ,易受海草和浮游生物等的干扰 , 须由专业的潜水人员安装 , 测量传感器单一且数据处理方式简单 ,无法适应海面风浪环境下的海流测量[35]。目前该项技术尚处于研究试验阶段[1]。
5.5 粒子图像测速仪(PIV)
PIV通过拍摄并测量流场中随流体共同运动的颗粒(示踪粒子)的速度实现流速测量 , 可快速测得瞬时全场速度分布。该项技术突破空间单点测量技术的局限性 ,可在瞬间记录某个平面内的流场信息。受图像采集和处理速度技术的限制 , 目前 PIV 系统的时间采样频率仍不能与热线和激光相比[20] , 因此多用于实验室流场分析[1]。
5.6 海洋湍流剖面仪
随着测流技术的提高 , 较大尺度的海流观测已不能满足精细化观测需求 , 可测量微结构海水湍流的海洋湍流剖面仪应运而生 , 代表产品包括德国 Sun & Sea公司的湍流剖面仪 MSS90和 ISW 公司的海水剪切探针 PNS03和 PNS06[19]。随着对海水微结构变化的深入了解 , 海洋湍流剖面仪将成为物理海洋调查仪器的重要组成部分。
5.7 小结
LDV、电阻式海流计、应变片海流计、PIV 和海洋湍流剖面仪的结构和电路设计较复杂 , 因此造价较高、使用条件较苛刻且操作较复杂 , 使其推广应用受到很大局限 ,仅适用于对测量精度要求较高的场合 ,适用于对表面流、近底层流、切变流和小尺度湍流等海流微结构的测量[33]。
6 结语
随着海洋科技的不断进步,海流观测技术逐渐发展和提升,不同类型的海流计各自发挥其独特的优势。本研究系统梳理各类型海流计的命名、分类、适用范围、特点和发展方向等内容,力求进一步统一行业常用术语,为规范海流计的使用提供参考。
参考文献
[1] 周庆伟,白杨,封哲,等.海流测量技术发展及应用[J].海洋测绘 ,2018,38(3):73-77.
[2] 潘云鹤,唐启升.中国海洋工程与科技发展战略研究综合研究卷[M].北京:海洋出版社 ,2014.
[3] 姬厚德.国内外海洋测流技术现状与进展[A].中国海洋学会 ,福建省海洋学会.福建省海洋学会学术年会暨海峡西岸经济区建设的海洋科技支撑与海洋资源开发学术研讨会论文集[C].福州:福建省海洋学会 ,2008:190-193.
[4] JENKINS A D,BYE J A T.Some aspects of the work of V.W.Ekman[J].Polar Record.2006,42(220):15-22.
[5] 刘彦祥.ADCP技术发展及其应用综述[J].海洋测绘 , 2016, 36(2):45-49.
[6] 罗续业.海洋技术进展[M].北京:海洋出版社 ,2015.
[7] 机械工业部.海洋仪器术语:ZBY 188-83[S].北京:机械工业部仪器仪表工业局标准化研究室 ,1983.
[8] 国家质量监督检验检疫总局,国家标准化管理委员会.海洋学术语物理海洋学:GB/T15920-2010[S].北京:中国标准出版社,2011.
[9] 机械工业部.海流仪器测试方法:JB/T 7480-94[S].北京:机械工业部仪器仪表工业局标准化研究室 ,1994.
[10] 宋大雷,周相建,陈朝晖,等.海流计发展现状与发展趋势展望[J].船海工程 ,2017,46(1):93-100.
[11] 张正惕,杨世伦,谷国传.我国海洋测流仪器的发展与现状[J].海洋技术 ,1999(2):18-22.
[12] 陈方兴.一种超声多普勒海流计的研制[D].厦门:厦门大学 ,2018.
[13] 冯硕.基于海洋平台的海流观测系统设计与关键部件研究[D].大连:大连理工大学 ,2019.
[14] 国家技术监督局.印刷海流计:JJG 627-1989[S].北京:中国计量出版社 ,2004.
[15] 李文谓,白少英,沈宁.135MC型磁录式海流计转子防护架的改进[J].海洋科学 ,1986(1):64-65.
[16] 劉和亮.海流传感器上升流测量装置的设计与标定研究[D].合肥:合肥工业大学 ,2019.
[17] 国家市场监督管理总局. SLC9型直读式海流计: JJG 628-2019[S].北京:中国标准出版社 ,2020.
[18] 陈长安,吴建岚,王升.基于 AVR单片机的海流计数据采集系统设计[J].现代电子技术 ,2014,37(16):111-113,116.
[19] 潘云鹤,唐启升.海洋强国建设重点工程发展战略[M].北京:海洋出版社 ,2017.
[20] 邵淑平.基于倾角法海流计的数据接收处理系统[D].青岛:中国海洋大学 ,2008.
[21] 林红军.电磁海流计传感器性能的比较[J].海洋技术 , 2005(2):13-17.
[22] 国家海洋局.声学多普勒流速剖面仪检测方法: HY/T 102-2007[S].北京:中国标准出版社 ,2008.
[23] 国家质量监督检验检疫总局,国家标准化管理委员会.声学多普勒流速剖面仪: GB/T 24558-2009[S].北京:中国标准出版社 ,2010.
[24] 交通运输部.声学多普勒流速剖面仪:JJG(交通)138-2017[S].北京:人民交通出版社 ,2017.
[25] 国家海洋局.声学多普勒流速剖面仪数据存储格式: HY/T219-2017[S].北京:中国标准出版社 ,2017.
[26] 王修林,王辉,范德江.中国海洋科学发展战略研究[ M].北京:海洋出版社 ,2008.
[27] 国家市场监督管理总局.声学多普勒海流单点测量仪检定规程:JJG 1166-2019[S].北京:中国标准出版社 ,2020.
[28] 单忠伟.海流测量技术综述[J].声学与电子工程,2011(1):1-5.
[29] 黄霞.声学多普勒海流流速测量系统的研究与实现[D].保定:华北电力大学(河北) ,2008.
[30] 芦军,范代读,涂俊彪,等.潮滩上应用 ADV进行波浪观测与特征参数计算[J].海洋通报 ,2016,35(5):523-531.
[31] PELTIER Y,RIVI?RE N,PROUST S,et al.Estimation ofthe error on the mean velocity and on the Reynolds stress dueto a misoriented ADV probe in the horizontal plane:case ofexperiments in a compound open-channel[J].Flow Measurement and Instrumentation·2013.34:34-41.
[32] 翟锡亮.声传播时间海流计的技术研究[D].哈尔滨:哈尔滨工程大学 ,2008.
[33] 鲁成杰.机电一体化新型旋转式海流计设计与开发[D].青岛:青岛理工大学 ,2011.
[34] 刘同波.激光多普勒测速仪的设计及实现[D].大连:大连理工大学 ,2006.
[35] 陈卓,任久春,朱谦.基于倾斜测流的浮标海流计原型设计与实现[J].自动化仪表 ,2019,40(4):85-88.
