
基于顾及曲率自适应邻域的点云单点分类方法
2021-08-24 06:41何鄂龙
现代制造技术与装备 2021年7期
何鄂龙
(中国船舶集团有限公司第七一五研究所,杭州 310023)
1 技术背景
随着LiDAR(Light Detection and Ranging)技术的快速发展,通过机载激光扫描、地面激光扫描和移动激光扫描可以更加快速地获取城市点云数据[1]。点云分类是三维点云场景分析中的关键[2],现已经成为摄影测量和遥感领域的研究主题[3]。
在点云分类任务中,点云数据缺失和不均匀的密度分布给分类任务带来了巨大挑战[4]。经典算法是提取典型的特征[5],并基于监督分类算法进行点云分类[6],可以分为点云邻域重构、点云局部特征提取和点云分类3个步骤[7]。
点云局部特征可以有效地表达实际场景中物体的结构信息,通常由局部邻域的点云空间分布统计得到[2]。三维邻域的构建可分为固定尺度方法和自适应尺度方法[4]。固定邻域方法受限于场景先验知识、点云密度以及曲率分布等。自适应邻域方法通过点云局部邻域的空间分布情况生成邻域,可以有效消除点云密度分布不均和线状分布带来的影响,但需要真实数据的先验信息作为参数。最小熵方法通过搜索邻域k或邻域半径r确定最优邻域[2],其中基于邻域半径r的方法容易受到密度变化的影响,基于邻域k的方法容易受到线状分布的影响。
本文采用点云单点分类方法对点云数据进行分类,创造性地提出了顾及曲率的自适应邻域估计方法,有效增强了点云统计特征的可分离性,进一步提升了分类效果。
2 算法流程
本文的点云分类方法主要包括曲率的自适应邻域估计、特征提取和监督分类3部分。整体的算法流程如图1所示。
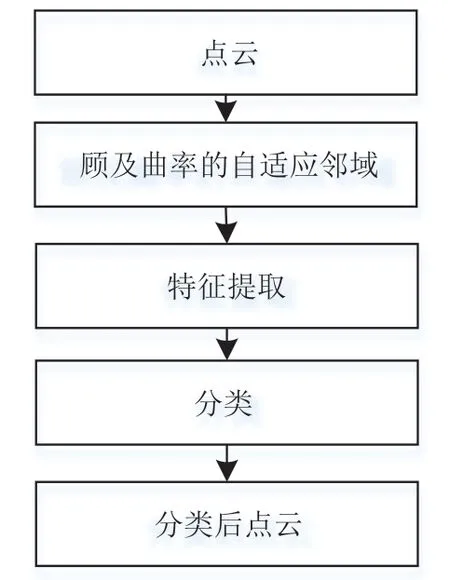
图1 点云分类方法流程
2.1 顾及曲率的自适应邻域估计
点云的曲率用于描述三维点所在表面的局部变化情况,通常由一定邻域范围内点集的统计信息得到。传统的方法是使用邻域内三维点集的协方差矩阵。基于协方差矩阵的3个特征值,可以得到点云数据的曲率信息:

点云曲率被归一化到[0,1/3],0表示三维点处于一个平面,1/3表示三维点处于混乱的分布状态。点云分布情况和自适应邻域的半径分布,如图2所示。通常点云数据中植被和物体的边界区域曲率较大,如图2(c)所示,此类点需要较小的邻域半径,反之小曲率区域,需要较大的邻域。因此,良好可分的特征提取方法需要要合适的自适应邻域。
图2(d)为基于k-最小熵的自适应邻域vk,k的取值范围为10~100,取值间隔Δk=1,点云邻域在区域Ⅰ中的高密度规则区域呈现为一种纤细的线状分布,不足以提供鲁棒的特征。图2(e)为基于r-最小熵的自适应邻域vr,r的取值范围为0.25~2.00 m,采样间隔Δr=0.05 m。在区域Ⅱ中存在与区域Ⅰ一样的问题。从区域Ⅲ可以看到,植被区域的邻域尺寸较大,无法有效提取细节特征。因为没有考虑点云在复杂城区场景中的不均匀分布,所以当前的自适应邻域在高密度的规则区域仍然呈现出线状分布。

图2 点云分布情况以及自适应邻域的半径分布。
基于两种最小熵的邻域估算方法,本文设计了一种估计曲率的自适应邻域估算方法vc。该方法主要是基于曲率阈值ct将点云数据预分割为规则区域和非规则区域,然后分而治之,如图3所示。
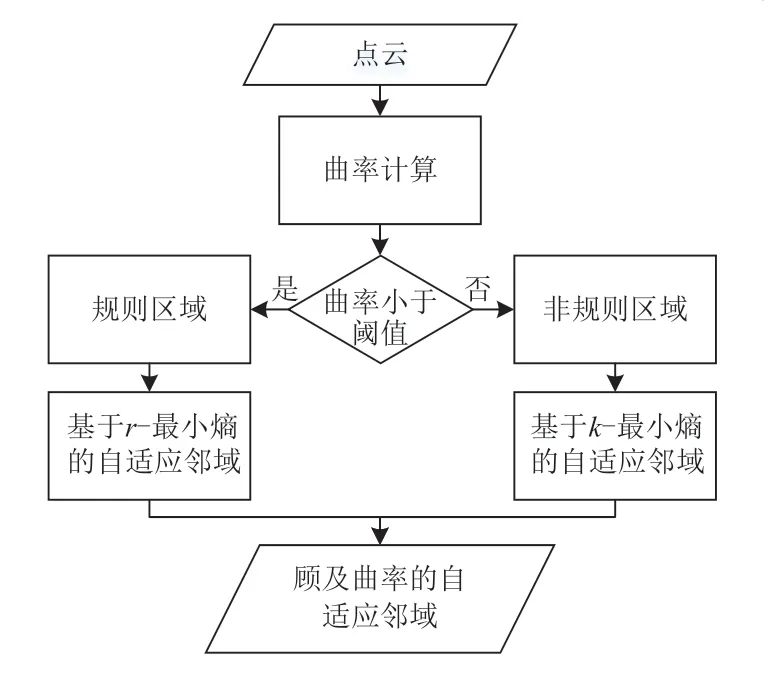
图3 顾及曲率自适应邻域估算方法流程图
由于离散点没有足够的邻近点支撑邻域构建,曲率需设置为1/3。点云数据中当曲率大于ct时被分类为散乱区域,并使用vk方法估算邻域,小于ct的则被分为规则区域,并使用vr方法估算邻域。

由于现实场景中的点云先验知识是未知的,点云自适应邻域需要以较小的边界覆盖场景中绝大部分类型的物体,并减小运算量。自适应邻域vk法选取最小边界kmin=10,通过主成分分析(Principal Components Analysis,PCA)法来估算3D局部几何特征,并根据数据的计算量合理设置上边界值。同时,自适应邻域vr法应设置下边界rmin=0.25 m,避免vr邻域集中在点云数据中某一条扫描线上。由于自适应邻域vc估算方法已经考虑了点云数据中规则与非规则区域的先验信息,并将参数k的上边界设置为50,以减小运算量,变化范围为10~50,采样间隔Δk=1。在本文方法中,综合考虑城市场景中物体的大小分布,自适应邻域的最大尺寸被限制为3 m。在规则区域内,邻域通常较大,可以将参数r的下边界设置为0.5 m来减少运算量。参数r∈[0.5,2.0],以Δr=0.05 m的步长采样,划分为30个尺度计算。通过上述两种办法,生成最终的顾及曲率自适应邻域vc。
曲率阈值通过k-means方法得到,因此要将点云数据划分为两个聚类,初始化聚类中心为点云中的最大曲率和最小曲率值。设两个聚类的中心点曲率值为cur1和cur2(cur2>cur1),ct计算如下:

从图2(e)中可以看到,在立面和地面等规则分布区域的点云数据通常有较大的点云邻域尺寸,而相对散乱分布的区域,其邻域尺寸相对较小。
2.2 特征提取
因为部分公开数据集点云数据只包含点云的空间位置特征,所以本文只选用点云数据的几何特征。点云特征可以表示为三维点所在局部表面的结构信息,主要通过计算局部邻域内点集的空间分布得到。本文方法通过点云曲率增强了点云单点特征的可分离性。点云特征主要包括点云立面度量V、归一化高差Dz以及基于特征值的特征Lλ、Pλ、Sλ和Cλ。
基于点云法线信息,可以得到点云的立面度特征:

式中:V表示点云局部平面与水平面之间的角度;nz是点云法向量的第3个分量。
归一化高差Dz,计算如下:

式中:Dz主要表示邻域内点集的高差分布情况;dz为点云邻域内的高差;zmax和zmin为邻域内点云最大值最小值。式(6)中hmax和hmin分别代表点云中的最大高度和最小高度。
特征值特诊计算如下:

式中:Lλ、Pλ和Sλ的和为1,分别代表点云邻域内的线性度、平面度以及离散度。
2.3 点云分类
本文点云分类使用随机森林(Random Forest,RF)方法,采用200棵树,树的高度为,其中d为分类特征的纬度。
3 实验结果
3.1 数据介绍
为评估本文方法的有效性,使用Oakland 3D Point Cloud Dataset进行点云分类,并将数据手动标记为植被、电线、电线杆/树干、地面和立面5类。
3.2 实验内容
实验中,考虑点云曲率阈值的影像,并验证基于k-means的方法估算曲率阈值的有效性,同时比较基于k-最小熵的自适应邻域vk、基于r-最小熵的自适应邻域vr和顾及曲率自适应邻域vc这3种不同的自适应邻域的估算方法。
3.3 结果与讨论
实验结果评价指标采用分类结果的召回率(Recall)、分类结果的正确率(Precision)、召回率和正确率的平均值(F1-score)以及代表分类结果的整体正确率(Overall Accuracy)。由于测试数据是非均衡数据集,整体正确率容易受点云数据中占比较大的类别影响,在实验中使用召回率和正确率以及平均值来评价不同类别的分类结果。
实验使用半径r=1 m来估算Oakland Point Cloud的曲率信息,选取阈值ct=0.03将点云数据分为规则和非规则区域。
通过k-means方法得到曲率阈值,初始聚类中心为0和1/3,迭代17次后达到稳定状态。各类别点云数据在规则区域和非规则区域的分布情况如表1所示。
从表1可以得到,90%的植被点和地面点都被有效区分开。为了评估曲率阈值的有效性,实验从区间ct∈[0.5,2.0]按照Δc=0.005的步长实验得到整体精度,如图4所示。当ct=0.03时,达到最高精度96.1%,验证了k-means方法选取曲率阈值的有效性。

图4 不同曲率阈值下的整体正确率

表1 通过ct=0.03划分的规则区域与非规则区域类别分布情况
由于自适应邻域估算方法vc综合了vk和vr的优点,对比这3种方法的结果如表2所示。从表2可以看到,自适应邻域估算方法显著提高了各个类别的3项指标结果。通过将点云数据划分为规则与非规则区域,可以充分挖掘vk和vr的潜力。

表2 评价指标比较 (单位:%)
4 结语
本文提出了一种基于顾及曲率自适应邻域的点云单点分类方法。基于Oakland数据集的实验表明,该方法有效提取了点云自适应邻域信息,并增强了点云单点特征的鲁棒性和可分性。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
中华养生保健(2020年7期)2020-11-16
吉林大学学报(理学版)(2020年3期)2020-05-29
数学物理学报(2019年5期)2019-11-29
自动化学报(2018年7期)2018-08-20
家教世界·创新阅读(2016年11期)2016-12-27
天津护理(2016年3期)2016-12-01
周口师范学院学报(2016年5期)2016-10-17
故事会(2016年15期)2016-08-23
