基于χ2故障检验的气压高度修正算法
2021-09-05 11:42王潇
电子设计工程 2021年17期
王潇
(南京理工大学自动化学院,江苏 南京 210094)
随着无人机的逐步发展,无人机穿梭于各种复杂环境间,要求其滞空时间越来越长,对其导航系统的要求也越来越高,而高度信息是无人机导航系统的关键参数之一。由于纯惯导的高度通道不能长时间单独使用,必须借用其他高度测量设备,比如气压高度计对其进行高度阻尼。通过气压计测量大气静压力间接测量飞行器高度,但受地球大气变化影响,大气静压力始终处于波动状态,对测量的高度信息有一定的影响。但是,由于大气变化比较缓慢,因此在短时间内气压高度计测量精度较高。针对短时间内气压波动缓慢这一特点,文献[1]中推导和分析了量度地球大气压强的近似公式,给出了压强、温度与高度之间的关系。在这一研究基础上,众多学者借用这一关系进行了气压高度计的设计,对在工程实践中出现的各种问题提出了各种可行的修正方案。文献[2]通过分析气压变化与温度变化之间的关系,提出气压线性修正算法,通过选取合适的修正参数达到修正气压测量值的目的。为获取所在位置的绝对海拔高度,提出了相应的参考点修正算法,两相结合在一定程度上取得了不错的效果。针对实际大气状态与标准大气状态不符造成的气压高度原理性误差,文献[3]中提出了一种多阶全微分误差修正算法,取得了不错的修正效果。文献[4]中使用折线线性拟合法,将正常工作高度范围分成了不同的多段,得到相应的高度表,通过测得的压力值在不同区间内获取相应的海拔高度。
上述方法在短时条件下都能获得准确的高度信息,但随着时间序列的增加,大气压力受地形、温度、湿度、风力、潮汐等一系列环境因素的影响,波动增大,会给高度计算引入原理性误差,不利于高精度导航的实现。因此,需要寻找一种修正算法对长时间使用的气压高度计进行修正,使其达到或接近短时精度。GPS能够提供准确的位置信息,但在近地面时,其高度信息的准确度相对较差,另外,其安全性也可能因受到干扰而得不到保障,因此文献[5]提出GPS数据与气压计数据融合的高度滤波算法,巧妙利用两者的优点,研制出一种组合高度系统。但在长时间导航过程中,气压高度计的原理性误差依旧没有得到很好的修正。该文采用χ2检验法实现对气压传感器的缓变故障检测,然后结合状态预测信息完成对气压高度计的修正,从而保障其长时工作精度。
1 气压高度测量原理
1.1 标准气压高度
在天向通道,大气压强与高度呈一定规律变化。气压高度计就是利用这一变化原理进行设计的,使用气压传感器测量大气压强,根据高度与气压之间的关系间接计算高度。
高度的测量需要选取一个合适的气压基准面,以便对高度数据的计算进行统一。我国民航飞行高度的测量常用的气压基准面有3种[6]:QNE(标准大气压)、QNH(修正海平面气压)和QFE(场面气压),分别用于计算标准气压高度、修正海平面气压高度和场压高度。参考国际标准化组织制定的《国际标准ISO2533——标准大气》,气压计测得的重力势高度HATR和相应大气压力PH之间的关系式为:

由于重力势高度又称标准气压高度,式(1)也可称为标准气压高度公式。表1为式(1)中各个字母参数的含义。

表1 字母参数含义
采用国际标准大气中对流层的气体参数,取β=-6.5×10-3K/m,Tb=288.15K,R=287.052 87 m2/K·s-2,Hb=0m,Pb=101.325 2 kPa,g=9.806 65 m·s-2。PH为气压计测量值,通过每次时间序列的更新测量即可获得气压高度数据。
1.2 修正海压高度
分析式(1)可知,在标准大气下,气压计测得重力势高度HATR是标准大气静压PH的单值函数。但实际海平面大气参数是动态变化的,随着时间序列的递增,与Tb和Pb产生很大的差别,此时气压高度计测得的高度数据计为,与标准大气下重力势高度HATR之间的误差为:

由于参数动态变化,其产生的噪声表示如下:
H0:短时(k≤n)噪声

H1:长时(k>n)故障

从式(4)看出噪声为有色噪声,该噪声受多种环境因素的影响,具有极强的非线性,不易补偿。因此,依旧使用Tb和Pb进行计算,会产生很大的原理性误差,致使高度数据与实际高度不否,需要设计一种算法对其进行修正。在使用式(1)进行计算时,可以通过温度传感器测量校正,采用修正海压公式对进行修正。根据先验知识,设修正海压为:

其中,Hf(k)为QFE(k)对应的海拔高度。初始校准时,用零时刻QFE(0)替换式(1)中的Pb,得到修正海压。根据气象观测站给出的南京某地7天观测数据修正海压数据,对a、b、c进行参数估计。取a=9.81,b=82 699.05,c=-0.932 75。如图1所示,虚线为气象台海压数据曲线,实线为参数拟合海压数据曲线。图2为拟合误差曲线,可知误差在0.2 hPa左右,在误差允许的范围内,参数估计结果在误差允许的范围内契合了当地气象台给出的数据,可用于工程应用。
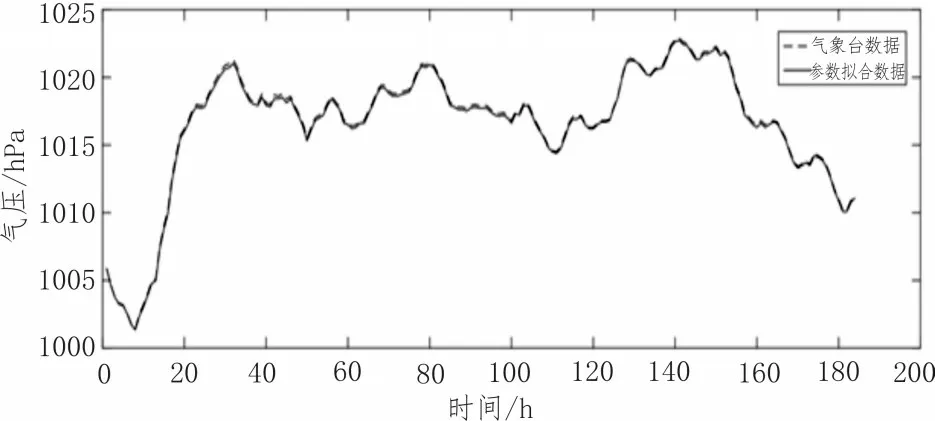
图1 修正海压算法
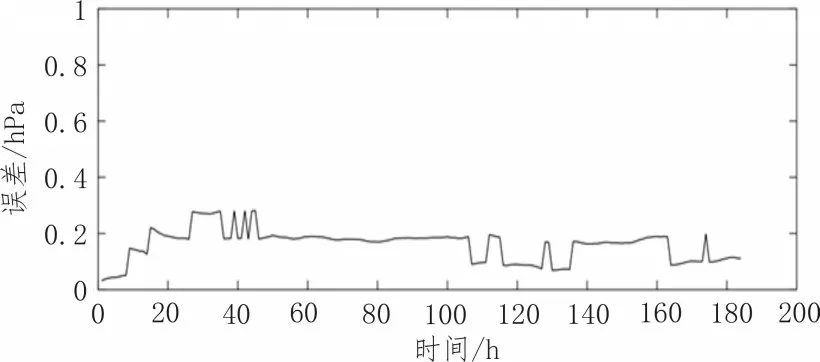
图2 拟合误差
在南京某地海拔高度为35.2 m的地方进行数据采集,从图3中的曲线走向可以看出,在初始阶段,采用修正海压法可以对高度数据起到短时的修正作用。但随着时间的推移,由于修正海压是固定的常值,大气波动会给之后计算的高度数据引入很大的原理性误差,误差波动接近80 m,致使气压计高度数据在长时导航中失去了参考作用,无法满足长时导航的高度通道精度需求。所以需要研究动态修正海压算法,使修正海压具有自适应功能。所以研究GPS辅助的气压高度计具有重要意义。

图3 修正海压高度曲线
2 气压/GPS高度数据融合
为了提高气压计的测量精度,在进行气压数据采集时,需要进行低通滤波处理,来减少噪声的干扰。常采用RC低通滤波器的差分形式来表示,便于软件编程,实现滤波功能。滤波[7]方程为:

PHK为该次滤波输出值,Xk为当前气压计测得数据,PHk-1为上一时刻滤波输出值,考虑系统的稳定性和响应速度,β可取0.25。
将滤波获取的气压计数据带入式(1)转化为高度数据,再与GPS高度数据进行融合,获取更为精准的高度数据。

HGPS为GPS高度数据,HATR为气压高度计高度数据,Z为最终融合高度数据,KH为权重,表示GPS高度数据与气压高度计数据的占比。假设GPS的数据存在零均值白噪声,则融合后的噪声可表示为:
H0:短时(k≤n)噪声
H1:长时(k≤n)故障
GPS定位精度与接收机收到的卫星数以及pDOP(三维位置精度因子)有关[7-10]。其之间的关系可描述为接收机接收到的GPS卫星数越多,pDOP越小。pDOP值越小,通过GPS解算得到的位置信息越精确,通常其值小于6时为有效定位,小于3为理想状态。设权重KH的计算公式为:

n为接收到的卫星数,p为pDOP值。GPS信号良好时,pDOP值越小,KH值越大,此时GPS测量高度值所占比例越大,其数据获得更多的信任,另外在长时导航系统中,融合后的数据稳定性也要比气压高度计的数据稳定性高。GPS信号较差时,接收机接收到的卫星数较少,pDOP较大,KH越小,误差越大,此时,高度融合值更加偏向气压计数据。此时可以保证在GPS或气压高度计出现问题时,其融合输出的高度数据收敛不发散。实验条件:在南京某地海拔高度为35.2 m的地方进行测试,在空旷的场地,GPS接收机搜到的卫星数n>10,pDOP在1.4左右,在有遮挡物(如高楼、树等)的场地,GPS接收机搜到的卫星数n<4,pDOP在4~8范围内波动。结果如图4、5所示,GPS辅助的气压计高度系统,GPS受到干扰时,融合系统可以消除干扰,气压计数据波动时,干扰虽已降低,但依旧会对融合的数据产生较大的影响,不能取得理想的实验效果。融合数据具有很大的信息量,考虑将其反作用于气压高度计系统,修正气压高度计原理误差,形成一个稳定的闭环系统。
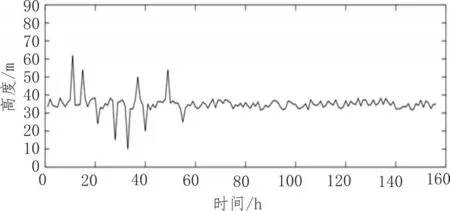
图4 GPS高度曲线
3 气压高度计故障检验
将气压高度计随着环境波动产生的原理性误差,视为故障,考虑一种合适的故障检测法对其进行监测。故障发生后,需要对初始修正海压进行重新修正,使其适应新的环境,从而实现修复故障的功能。
大气静压是缓慢变化的,故其产生的故障为缓变量,GPS的故障可视为突变量,故可采用状态递推器的状态χ2检测法[11-16]对系统进行故障检测。通过构造一个状态递推器,该状态递推器利用每隔一定时间的系统估计值作为递推的先验信息进行时间更新,而不进行量测更新,因此不受故障信号的干扰[17]。该方法能及时发现系统的缓变故障,提高故障检测灵敏度,保障气压高度计系统的安全性和可靠性[18-19]。设经数据融合得到(k),其和气压高度计信息有关,会受到系统故障的影响。(k)为状态递推器的输出结果,可由k-n时刻递推得来,不受系统故障影响。
估计误差定义如下:


同时定义:

β(k)的方差表示为:

则故障检测函数为:

故障判断准则如下:
若λ(k)>TD,判定系统有故障;
若λ(k)≤TD,判定系统无故障。
由式(7)、(10)可知,GPS突发故障可以被忽略,故系统出现故障时,可以判定为气压高度计的缓变故障。故障判定后,对式(1)中的Pb进行修正。选取合适的时间间隔n,假定k-n时刻系统正常工作,缓慢故障发生在间隔为n的时间段内,用Z1(k-n)修正式(5)中的Hf(k),代入当前时刻测得的QFE(k),计算得到QNH(k),即为新的修正海压Pb。经过故障检测算法修正的数据曲线如图6、7所示。
从图6可以看出,故障检测后的气压高度计精度较图3有明显的改善。高度数据基本稳定在30~40 m之间,误差在5 m左右。图7为经过故障检测数据融合后的结果,与单GPS高度数据相比(图4),消除了GPS突变噪声的影响;与无故障检测数据融合结果(图5)和故障检测后的气压高度数据相比,输出的高度数据更平稳,数据在35.2 m小范围内波动,最后结果验证了该算法的可行性。

图5 融合高度曲线

图6 故障检测修正海压高度曲线
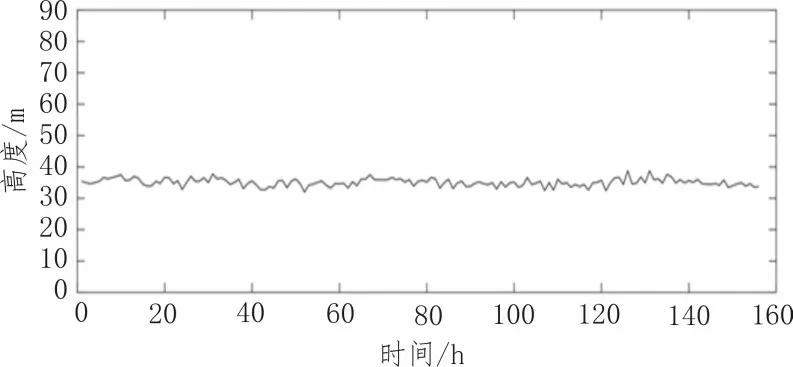
图7 故障检测融合高度曲线
4 结论
在分析了气压计高度测量算法、GPS辅助高度融合算法的原理及优缺点的基础上,提出了基于故障检测的高度融合算法。该方法在GPS辅助高度融合算法的基础上,加入状态χ2故障检验。在GPS受到干扰时,可以消除GPS突变噪声的影响。在选取了合适的时间间隔n后,可以兼容短时、长时导航中高度通道的精度要求。通过多天数据观测以及仿真分析,证明该方法能有效改善长时导航中气压计高度测量的精度,提高了系统的准确性和可靠性。
猜你喜欢
气象水文海洋仪器(2022年2期)2022-07-08
幼儿画刊(2021年5期)2021-12-02
海洋通报(2021年3期)2021-08-14
海洋学报(2020年3期)2020-05-22
自动化与仪表(2019年8期)2019-09-03
成都信息工程大学学报(2019年6期)2019-08-13
模具制造(2019年4期)2019-06-24
电子制作(2019年9期)2019-05-30
思维与智慧·下半月(2017年12期)2017-12-25
电子与信息学报(2016年10期)2016-10-29