一种超低空飞行的仿生扑翼飞行器的设计及分析
2021-09-13 07:34叶锦涛刘凤丽郝永平刘双杰郭梦辉冯卓航
工程设计学报 2021年4期
叶锦涛,刘凤丽,郝永平,刘双杰,郭梦辉,冯卓航
(1.沈阳理工大学机械工程学院,辽宁沈阳110159;2.沈阳理工大学装备工程学院,辽宁沈阳110159;3.内蒙古北方重工业集团有限公司南京研发中心,江苏南京211100;4.西安交通大学数学与统计学院,陕西西安710049)
在自然界,扑翼飞行的鸟类和昆虫具有优越的飞行性能[1-3]。目前,人类研发的飞行器主要有固定翼、旋翼和扑翼三大类。相较于固定翼和旋翼飞行器,扑翼飞行器具有机动能力强、在低雷诺数下机械效率高、隐蔽性强等特点。在穿梭往返于狭窄地带进行空中侦察时,扑翼飞行器的优势尤为突出[4-7]。
扑翼飞行器的研究受到广泛关注。很多研究机构通过多种方法改善了扑翼飞行器的驱动方式和飞行效率[8-13]。在扑翼飞行器的设计方面也有不少研究成果。美国Aero Vironment公司研制了仿蜂鸟机器人Nano Hummingbird[14],其总质量为19 g,翼展为16.5 cm,扑翼频率为30 Hz;采用电机加绳传动的驱动方式,翅膀的扭转动作由绳传动和限位装置的控制实现,首次实现了仿生扑翼飞行器的悬飞和六自由度可控飞行;但其尺寸太小,空中载重飞行能力较弱。德国Festo 公司研制了一款仿生蝙蝠Bionic Flying Fox[15],其总质量达580 g,翼展为228 cm,体长为87 cm;翅膀由一种极薄而强韧的薄膜制成,该薄膜由1层弹性纤维和2层密封膜构成;其特点是在飞行时能够通过骨架的运动来控制翅膀变形,从而获得较强的飞行能力;但该飞行器尺寸较大,在空中飞行时易被地面人员察觉,应用范围受限。美国特拉华大学于2004年研制了名为“Sparrow”的微型扑翼飞行器[16],其早期为木质结构,总质量为50 g,翼展为50 cm,后改进为碳纤维复合结构,总质量为15 g,翼展为36 cm;之后又研制了“MPH”系列扑翼飞行器,采用微凸轮结构,实现了飞行器的弦向扭转。刘晶等设计了一款总质量为23.8 g,翼展为18 cm,扑翼频率为22 Hz,扑动幅值为180°的可垂直起飞的仿昆虫微型扑翼飞行器[17],但该飞行器产生的升力仅大于自身质量2 g,且由外部电源供电,难以在实验室外完成载重飞行任务。曹金秋等提出了一种采用6个转动副、具有2个自由度的空间扑翼机构[18],但未进行飞行器整体结构的设计及样机制作,结构设计的合理性没有得到试验验证。
在空中侦察等需求背景下,需要既具备一定的负载能力,又具有高隐蔽性的飞行器。目前,小尺寸飞行器常常难以完成户外载重飞行任务,而载重型飞行器的尺寸一般都比较大,在超低空飞行时易被地面人员察觉。因此,笔者在总结前人研究经验的基础上,设计并制作了一款基于平面传动机构的小型扑翼飞行器并进行了飞行试验,以实现飞行器的超低空飞行,并具有空间隐蔽性。超低空一般指距地面的飞行高度在300 m以内[19]。
1 扑翼飞行器的总体设计要求
所设计的扑翼飞行器将应用于超低空侦察等。因此,飞行器须具有较强的仿生性,能够模拟中小型鸟类的扑翼动作,具备加减速、转向、抬升、俯冲等空中运动能力,以承担跟踪地面移动目标的任务,并能完成在一定区域内的侦察及搜寻工作。要求飞行器的飞行高度可控,飞行速度不宜过慢,在超低空执行侦察等任务时不易被地面人员察觉。
以中小型鸟类为参照进行扑翼飞行器总体尺寸的设计。扑翼飞行器的模型如图1所示。
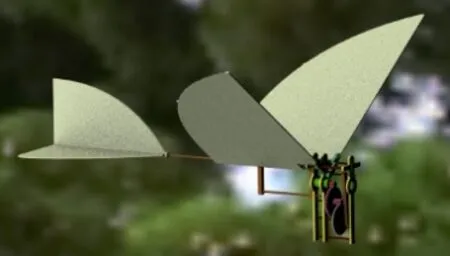
图1 扑翼飞行器模型Fig.1 Model of flapping wing aircraft
平面传动式扑翼飞行器多采用单曲柄滑块机构。但是之前的许多构型要么造成了机翼在扑动时的不对称性,要么因添加齿轮而增加了传动部分的重量。本设计基于曲柄滑块机构,对由联动杆贯穿的翅根进行开槽设计,使得联动杆可以在翅根的槽内滑行,带动翅膀扑动。此举既保证了扑翼的对称性,又降低了结构的复杂性。
平面机构自由度F的计算公式为:

式中:n为活动构件的个数;Pl为低副数;Ph为高副数。
所设计的扑翼飞行器为四杆机构,有3个活动构件,3个旋转副和1个移动副均为低副。根据式(1)可得其自由度为:

扑翼飞行器的转向和俯仰姿态由尾翼调节,因此扑翼只有1个自由度,其动力源数也为1。可见扑翼的自由度数量与动力源数相等,机构运动可以确定。
要求设计的扑翼飞行器与常见的中小型鸟类具有一定的相似性,在空中执行侦察等任务时难以被地面人员察觉。飞行器以空心杯电机作为驱动源,采用二级减速齿轮增大转矩,由传动机构带动扑翼实现往复扑动功能。通过扑翼运动使飞行器产生升力,利用遥控发射与接收装置对电机转速等飞行参数进行控制。其外形如图2所示。

图2 扑翼飞行器外形Fig.2 Appearance of flapping wing aircraft
其设计要求如下:
1)飞行器总体尺寸与中小型鸟类相当,翼展不超过50 cm;扑动稳定,左右翅膀对称分布。
2)扑翼频率能够变化,最大扑翼频率为15 Hz,即最小扑翼周期约为0.067 s。
3)扑动幅度尽可能大,扑动幅值θ≥45°。
4)尾翼能够被操控,以完成飞行器的空中转向动作。
2 扑翼飞行器扑动机构的设计
扑翼飞行器的传动机构为平面式结构。依据上述设计要求,以曲柄滑块机构为机构核心,设计了一种平面式扑动机构。平面单自由度扑动机构可以通过曲柄滑块机构将驱动马达的转动转化为翼的扑动,利用柔性翼梁和翼肋的气动弹性形变实现翼的二维运动[20]。
扑翼飞行器的传动机构如图3所示。其中:x方向为水平方向,y方向为垂直方向;O1为输出齿轮与机架的铰接点,O2为翅膀前缘与机架的铰接点;曲柄O1A为原动件,当O1A转动时,滑块B沿y方向作上下往复运动,带动翅膀前缘BO2在xy平面沿O2来回转动,从而带动机翼上下扑动。
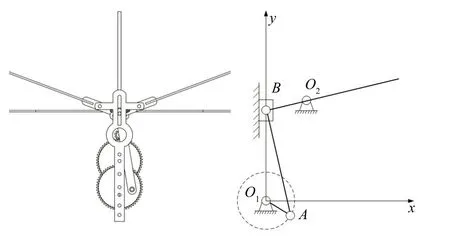
图3 扑翼飞行器传动机构示意图Fig.3 Schematic diagram of transmission mechanism of flap‐ping wing aircraft
滑块运动如图4所示。其中:B1、B2分别为滑块质心的上止点和下止点;L1、L2分别为左、右翅根与机架的铰接点到滑块质心的距离;L为滑块行程;d为左翅根与机架的铰接点到右翅根与机架的铰接点的距离,其值与机架形状相关,结合飞行器的尺寸大小,取d=30 mm;通过对中小型鸟类飞行的研究,设定扑翼飞行器的扑动幅值为65°,其中向上扑动角α=40°,向下扑动角β=25°。
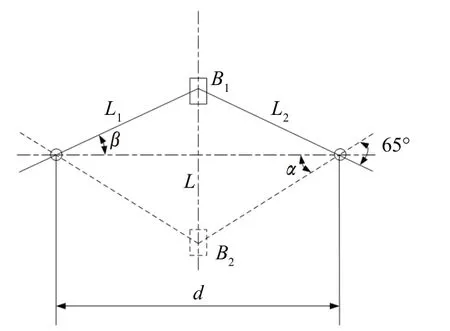
图4 滑块运动示意图Fig.4 Schematic diagram of slide block motion
由图4可知:
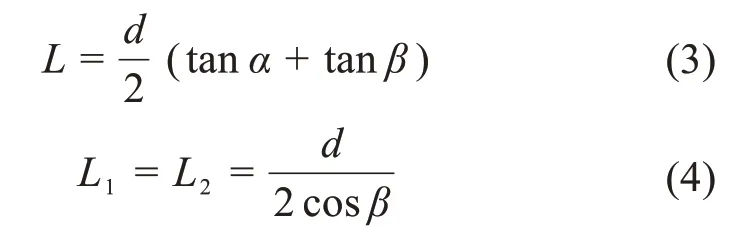
将d=30 mm,α=40°,β=25°代入式(3)和式(4),可得:
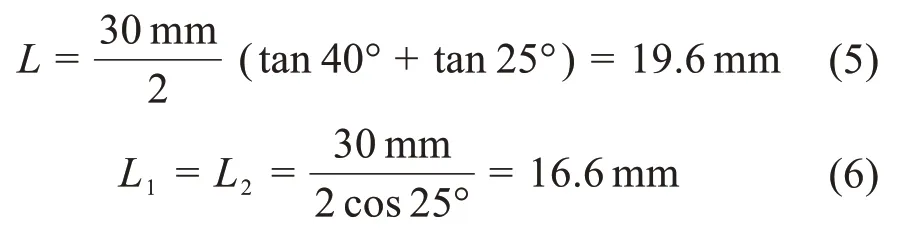
根据L的数值,可以进行飞行器机架正面滑槽长度的设计;根据L1、L2的数值,可以进行左翅根和右翅根的结构设计。设计的曲柄滑块机构如图5所示。其中:S为滑块在任意时刻水平方向的位移;S1为曲柄长度;S2为连杆长度。
图5 曲柄滑块机构Fig.5 Crank slider mechanism
由曲柄滑块机构的几何关系可知:

结合实际加工条件,设置扑翼飞行器的设计参数如下:翼展,41.2 cm;扑翼频率,15 Hz;扑动幅值,65°;滑块行程,19.6 mm;曲柄长度,9.8 mm;左、右翅根与机架铰接点的间距,30 mm。
3 扑翼飞行器虚拟样机的设计及仿真分析
选用三维设计软件Creo进行扑翼飞行器整机结构设计。扑翼飞行器由机架、驱动机构、扑动机构、左右机翼和尾翼构成。驱动机构由空心杯电机、小齿轮、双联齿轮和末级齿轮构成;扑动机构由曲柄、联动杆和左右翅膀前缘构成。在Creo软件中对扑翼飞行器进行建模,定义电机、齿轮副等的类型,设定相应的运动参数,进行扑翼运动仿真;对飞行器翼面末端的端点进行标记,绘制扑翼飞行器翼面末端的运动轨迹;用测量模块进行角度测量。
扑翼飞行器在不同时刻的运动姿态及翼尖轨迹如图6所示。

图6 扑翼飞行器在不同时刻的运动姿态及翼尖轨迹Fig.6 Motion attitude and wing tip trajectory of flap‐ping wing aircraft at different times
扑翼飞行器的扑动幅值为64.270 5°,如图7所示,可见与设计值65°基本一致,表明构建的三维模型符合设计要求。

图7 扑翼飞行器扑动幅值Fig.7 Flapping amplitude of flapping wing aircraft
为了对扑翼飞行器在运动过程中的角度、角速度、力矩等参数进行分析,将Creo软件所绘制的扑翼飞行器三维模型导入ADAMS(automatic dynamic analysis of mechanical system,机械系统动力学自动分析)软件。扑翼飞行器动力学分析模型如图8所示。

图8 扑翼飞行器动力学分析模型Fig.8 Dynamics analysis model of flapping wing aircraft
对扑翼飞行器各部件的材料进行定义,对各部件之间的连接方式进行设置。确定了各运动副类型及驱动方式后,进行动力学仿真分析。
扑翼飞行器扑动幅度和角速度的仿真结果如图9(a)和图9(b)所示。由图9(a)可知,扑翼飞行器的扑动幅值约为65°,与模型设计值一致。由图9(b)可知,当扑翼飞行器的翼尖部位处于最高点或最低点时,其角速度为0 rad/s;当翼面处于水平位置时,其角速度达到最大。

图9 扑翼飞行器扑动幅度和角速度的仿真结果Fig.9 Simulation results of flapping amplitude and an‐gular velocity of flapping wing aircraft
扑翼飞行器旋转关节处平衡力矩的仿真结果如图10所示。由图可知,在下扑阶段,连杆与滑块接触处x方向的平衡力矩比y方向的大许多。比较2个连接处的平衡力矩可知,连杆与滑块接触处的平衡力矩大于翅根与机架铰接点处的平衡力矩,因而在结构设计时,应关注连杆与

图10 扑翼飞行器旋转关节处平衡力矩的仿真结果Fig.10 Simulation result of balance torque at the rotat‐ing joint of flapping wing aircraft
滑块接触处材料的强度,选用强度较大的钢材料作为滑块材料。
4 扑翼飞行器的制作和飞行试验
根据设计参数制作扑翼飞行器样机,并进行室内和户外飞行试验。扑翼飞行器的主要材料为碳纤维,机翼选用涤纶布,动力装置采用空心杯电机。依照在Creo软件中建立的三维模型进行制作。
为了使飞行器在空中完成指定方向的飞行,具备转向能力,在飞行器尾翼设计中采用“⊥”形尾翼。尾翼与一级舵机连接,一级舵机控制尾翼的左右运动,同时一级舵机与二级舵机相连,二级舵机控制一级舵机和尾翼的上下运动,二级舵机则同时与机架相连。对扑翼飞行器各部件进行组装并进一步固定。扑翼飞行器实物如图11所示。

图11 扑翼飞行器实物Fig.11 Material object of flapping wing aircraft
首先进行扑翼飞行器室内飞行试验。采用遥控装置控制电机转动,电机转子输出的扭矩经齿轮副作用在曲柄齿轮上带动摇杆运动,摇杆拉动滑块在机架内作往复直线运动;滑块分别穿过左、右翅根,翅根转动,并带动两侧机翼作往复扑翼运动;待飞行器飞到一定高度时,调整尾翼使飞行器的攻角保持恒定,调节电机转速以控制飞行器的飞行速度;当飞行前方出现栏杆时,控制尾翼转动,使飞行器接收到指令后向右方转向,避开前方的障碍物。扑翼飞行器室内飞行试验如图12所示。

图12 扑翼飞行器室内飞行试验Fig.12 Indoor flight test of flapping wing aircraft
扑翼飞行器室内飞行试验完成后,进行户外飞行试验。控制尾翼向左水平摆动,使飞行器向左转向;控制尾翼向右水平摆动,使飞行器向右转向;飞行器在空中飞行一段时间后,控制飞行器往教学楼飞行,最终抵达目标地点——教学楼窗户,此时飞行器的飞行高度为13~15 m。扑翼飞行器户外飞行试验如图13所示。

图13 扑翼飞行器户外飞行试验Fig.13 Outdoor flight test of flapping wing aircraft
飞行试验表明,扑翼飞行器可以进行较长时间的室内和户外飞行,飞行时长达3~5 min,且具有加减速、转向、抬升、俯冲、避障等能力,可以实现超低空飞行。所设计的扑翼飞行器仿生性能较好,飞行时声音较小;其外形和飞行动作较接近鸟类,当飞抵一定高度时,隐蔽性大幅增强,难以被地面人员察觉。
5 结论
设计了一种仿生扑翼飞行器。通过对鸟类飞行的研究,结合设计要求,确定了扑翼飞行器的设计参数;通过Creo软件构建了飞行器模型,并在此基础上采用ADAMS软件进行动力学分析;制作了扑翼飞行器样机,并进行室内和户外飞行试验,试验结果验证了该扑翼飞行器的实用性。
采用平面式曲柄滑块机构作为扑翼飞行器传动机构,有助于减小飞行器的体积,同时保证了扑动的对称性和稳定性;设计了一种采用双级传动的尾翼,可实现转向和俯仰多自由度飞行姿态的调节。扑翼飞行器结构简单,没有冗余构件,具有良好的仿生性能和飞行能力,可以进行超低空飞行,应用前景较广。
猜你喜欢
机械工程师(2021年4期)2021-04-19
湖北工业职业技术学院学报(2021年1期)2021-04-01
名车志(2020年10期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
家庭影院技术(2019年12期)2020-01-19
设备管理与维修(2019年22期)2019-12-19
产品可靠性报告(2017年6期)2017-09-05
工业设计(2016年4期)2016-05-04
油气田地面工程(2014年5期)2014-03-09
河南科技(2014年6期)2014-02-27