
石墨烯驱动器的设计及性能研究
2021-09-15 02:43王可胜姜心成
科技视界 2021年23期
李 润 李 亨,* 王可胜 姜心成
(1.合肥工业大学航空结构件成形制造与装备安徽省重点实验室,安徽 合肥230009;2.合肥中南光电有限公司,安徽 合肥231600)
0 引言
柔性智能驱动器能将外部能量转换为机械能输出,在人工肌肉、仿生软体机器人、生物医学设备等领域具有广泛的潜在应用,因而受到了极大的关注[1]。到目前为止,已经实现了利用各种外部刺激,包括电、光以及磁场等驱动的柔性智能驱动器。其中,驱动器通过光或电驱动的方式因其独特的特点而引起广泛的研究。对于电响应驱动器,电刺激很容易获得,操作简单可控。对于光响应驱动器,可以实现无线通信驱动,远程控制,且丰富的光源尤其是自然界无尽的太阳光弥补了电驱动的缺点。因此这两种类型的驱动器可以相互补偿进一步扩大实际应用。然而,大多数驱动器通常只能响应其中一种刺激,这表明了对双响应驱动器的探究是非常重要的。
材料成分是柔性驱动器设计的重要因素。石墨烯具有二维结构[2],优异的电热转换以及光热转换特点,已经得到了广泛的研究和应用。尽管石墨烯可以通过能量转换产生的热效应使自身产生机械变形,但它们需要结合热膨胀材料来制备柔性驱动器。此外,在含聚合物的双层薄膜复合结构中,聚合物通常作为软质材料在复合结构中作为膨胀层,起到受热膨胀的作用。在这项工作中,利用石墨烯的电热转换特性、聚合物的热膨胀性能与双层结构设计相结合,制备了一种石墨烯基驱动器。通过滴涂法制备石墨烯膜,接着将石墨烯粘贴在PET膜上。该制备方法快速易操作,且制备的石墨烯/聚合物双层薄膜驱动器可以对电和光刺激产生双响应变形。该双层薄膜驱动器可以将电能和光能转换成热能,电刺激下能够快速的响应变形,在8秒内可以产生约5 mm的变形位移,同时该驱动器也实现了光照刺激下,在8秒内产生约6 mm的变形位移。由于该驱动器优良的驱动性能,该类型的双层薄膜驱动器可以用于设计仿生智能器件。我们设计了一朵人造花,在光刺激下展开,撤掉光源回复到原始形状。这些结果表明石墨烯双层薄膜驱动器在人工肌肉,软体机器人领域具有潜在的应用前景。
1 驱动器制备及表征
1.1 石墨烯/聚合物双层薄膜驱动器的制备过程
还原氧化石墨烯薄膜的制备:氧化石墨烯溶液购自南京先丰纳米材料科技有限公司,购得厚度为60μm的PET自黏膜。氢碘酸是购自国药化学试剂有限公司。氧化石墨烯膜是通过滴加10 ml氧化石墨烯溶液(2 mg mL-1)在玻璃片上,然后在60°C下干燥。所得氧化石墨烯膜浸入氢碘酸溶液中1小时,获得还原的氧化石墨烯膜。接着,将还原的氧化石墨烯膜用乙醇反复清洗,以去除残留的氢碘酸,得到所需的石墨烯膜。
石墨烯聚合物双层薄膜驱动器的制备:在还原的氧化石墨烯膜上直接复合黏性的聚合物膜(PET)。然后将石墨烯聚合物双层薄膜驱动器切割成预先设计的形状,以满足在实验中的需求。
1.2 石墨烯膜的表征
氧化石墨烯具有和石墨烯相似的单分子层的二维网络结构。不同的是,在氧化石墨烯表面存在大量的极性含氧官能团如羟基、环氧基和羧基等,这些含氧官能团的存在增加了石墨烯结构的复杂性。石墨烯膜拥有很好的层状结构,且呈波纹状。这种结构与含氧官能团的引入有很大关系。基团间通过氢键相连,所以其在纵向可以形成很好的层状结构。石墨烯膜具有和氧化石墨烯相同的层状结构,其表面粗糙,原因可能是氢碘酸进入氧化石墨烯夹层发生氧化还原反应,导致表面出现大量褶皱。
2 驱动器驱动机理
双层薄膜驱动器产生弯曲变形的原因是由于两层薄膜材料的热膨胀系数差异所导致的,热膨胀系数差异越大,整体的弯曲变形越大。为了使双层薄膜结构的驱动器实现较大的弯曲变形,理想的设计是使其中一层具有正的热膨胀系数,能够受热膨胀,而另一层具有受热后收缩的性能,这种结构设计可以使热膨胀系数差异最大化,最终的机械变形输出也最大。根据此驱动机理,我们设计了石墨烯/聚合物双层薄膜驱动器,在此双层薄膜结构中,聚合物(PET)的热膨胀系数(CTE≈60×10-6K-1)较大,而另外一层石墨烯薄膜热膨胀系数为负且拥有独特的热收缩性能,由不同热膨胀系数材料组成的双层薄膜结构在受热时双层薄膜之间产生热变形失配,最终双层薄膜结构整体向石墨烯层弯曲。
对石墨烯聚合物双层薄膜驱动器的电驱动性能进行了研究。为了形成电流流通回路,双层薄膜结构被切割成U型形状。U型石墨烯聚合物双层薄膜驱动器的开口端用导电银胶连接并固定到电极上,使另一端可自由变形。其中,石墨烯作为电热转换元件,使施加于双层薄膜驱动器电极两端的电压通过石墨烯层的电阻转化为焦耳热,同时,由于聚合物层与石墨烯层之间良好的界面结合,石墨烯层所产生的热量可以快速有效地传递到聚合物层,导致聚合物层受热膨胀。在收缩层与膨胀层的协同作用下,石墨烯聚合物双层结构在电刺激下向石墨烯侧弯曲。当电输入中断后,热量停止产生并且逐渐向周围环境消散,导致双层结构逐渐恢复到初始的位置。
3 实验结果分析
3.1 电响应驱动
我们探究了石墨烯/聚合物双层薄膜驱动器的电驱动性能。当对石墨烯/聚合物双层薄膜驱动器施加12 V的驱动电压,在U型回路中能够产生约60 mA的电流,导致双层薄膜驱动器产生焦耳热。因此,驱动器向石墨烯侧弯曲。电刺激8秒后,这种双层薄膜驱动器的位移变化约为5 mm,当关闭电源后7秒后驱动器回复原形,随着施加的驱动电压从4V增加到12 V,驱动位移也在逐渐增大。图1a和图1b表示在驱动电压4 V、6 V、8 V、10 V、12 V下,驱动器的最大弯曲位移与最大温度之间的关系。由图可知,驱动器的温度变化与变形位移的变化基本一致。在电热效应中,输出的热能取决于输入电源的大小,该驱动器在增加驱动电压的同时温度的升高可以清楚地观察到,进一步揭示当电压施加在电极上时的电热效应。随着电压的增加,导致双层薄膜驱动器产生更大的热响应变形,驱动器的变形位移也越大,因此可以通过调整驱动电压来控制变形位移的大小。
3.2 光响应驱动
为了实现光驱动,在驱动之前将驱动器裁剪成矩型形状,此驱动器的上端固定在玻璃片上,另一端可以自由变形。当模拟太阳光的光源从右侧照射,驱动器向石墨烯侧弯曲,并在8秒内产生约6 mm的弯曲位移,撤掉光源时在6秒内完全回复到原始形状,展示了该驱动器的光学驱动也是完全可逆的。该驱动器的变形幅度可以通过调节光照强度来进行调控。图1c和图1d给出了光驱动过程中详细的位移与温度的变化,驱动器的位移变化随着光照强度从73 mW cm-2增加到208 mW cm-2,弯曲位移也逐渐变大,弯曲位移的变化和温度变化一致,证实了该驱动器的驱动主要是因为光热效应。在石墨烯/聚合物的双层薄膜驱动器上,石墨烯吸收光并转化为热能,由于良好的介面接触导致聚合物膜可以快速地接收到石墨烯的热能使得双层膜的温度升高,石墨烯/聚合物双层薄膜驱动器整体产生弯曲。
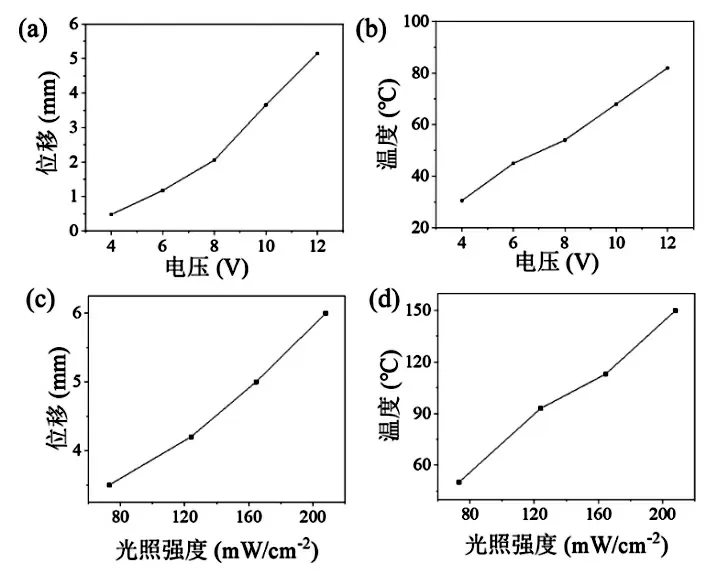
图1 驱动器的电/光驱动性能
由于石墨烯/聚合物双层薄膜驱动器具有响应速度快,相对较低的工作温度以及光/电刺激双响应的特点,特别是该驱动器的双响应特性在仿生领域可以进一步扩大其应用范围。为了证明其在仿生领域的应用,在这里,我们设计了一种具有光响应特点的人造花。如图3所示,这朵花由四块石墨烯/聚合物双层薄膜驱动器组成,在无任何外部刺激的情况下是处于闭合状态。当施加光照刺激,在2秒内快速响应,花瓣展开,当撤销光照刺激时,在3秒内快速回复到原始形状。

图2 光驱动下花朵的开放
4 结论
本文利用具有优异的电热和光热转换性能的石墨烯和具有良好的热膨胀系数的聚合物制备了双响应的薄膜驱动器。该类型的柔性驱动器响应速度快且变形可逆,归因于石墨烯的电热和光热转换能力,聚合物的热膨胀特性以及双层薄膜结构。施加12 V的低电压刺激,该驱动器能够在8秒内产生5 mm的弯曲位移,光照后,该驱动器能够在8秒内产生6 mm的位移。基于这种双响应驱动器,设计了一朵人造花,它能够在光刺激下开花,并且在撤销外部的光照刺激后,能够回复到原始形状。这些结果显示了石墨烯/聚合物双层薄膜驱动器在先进的智能仿生器件中具有良好的应用前景。
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
现代装饰(2019年11期)2019-12-20
光源与照明(2019年4期)2019-05-20
电线电缆(2017年2期)2017-07-25
光学精密工程(2016年5期)2016-11-07
舰船科学技术(2016年1期)2016-02-27
上海电机学院学报(2015年3期)2015-02-28
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11
电视技术(2014年19期)2014-03-11
