草莓采摘机械研究现状与发展趋势
2021-09-28 19:56祝前峰陆荣鑑鲁峻李奉顺
农业科技与装备 2021年5期
祝前峰 陆荣鑑 鲁峻 李奉顺

摘要:研究草莓采摘机械对于实现草莓机械化生产具有重要意义。综述目前草莓采摘的主要方式,分析现有草莓采摘机械应用中存在的问题,指出未来草莓采摘机械的发展趋势,以期为草莓采摘机械的性能改进及推广应用提供参考。
关键词:草莓;采摘机械;现状;发展趋势
中图分类号:S225 文献标识码:A 文章编号:1674-1161(2021)05-0062-03
辽宁地区肥沃的土壤和适宜的气候适合草莓种植,东港、庄河等地依靠草莓产业实现了增收保收、脱贫致富。随着城镇化的不断推进,农业从业人数锐减,农忙时节用工难和人工成本增长问题日益凸显。草莓采摘时间约占整个生产过程的1/4,采收成本占草莓生产总成本的50%~70%。草莓一般采用大棚种植,棚内草莓整齐排列、分布规则,为机械化采收提供了有利条件;草莓果实为穗状串行,枝叶遮挡较少,果实色泽明亮,为机器视觉识别提供了有利条件。机械化采收可以克服人工采摘劳动强度大、效率低、成本高和工作环境差等缺点,研究草莓采摘机械具有重要的实用价值和现实意义。
1 目前草莓采摘的主要方式
1.1 人工采摘
人工采摘是目前草莓采摘的最主要形式,果农用双手或剪刀将果实从藤上取下轻轻放入身旁的收集筐中,需反复弯腰劳作。但草莓采摘周期较短,成熟的草莓采摘不及时将会大大降低果实品质,对后期的运输、加工和销售产生直接影响。人工采摘草莓能够最大程度保证果实的完好性,但劳动强度大、采摘效率低、人工成本高,大大阻碍了草莓产业的大规模发展,挫伤了果农的生产积极性,因此需要引入机械化采收来完成繁重的采摘任务。
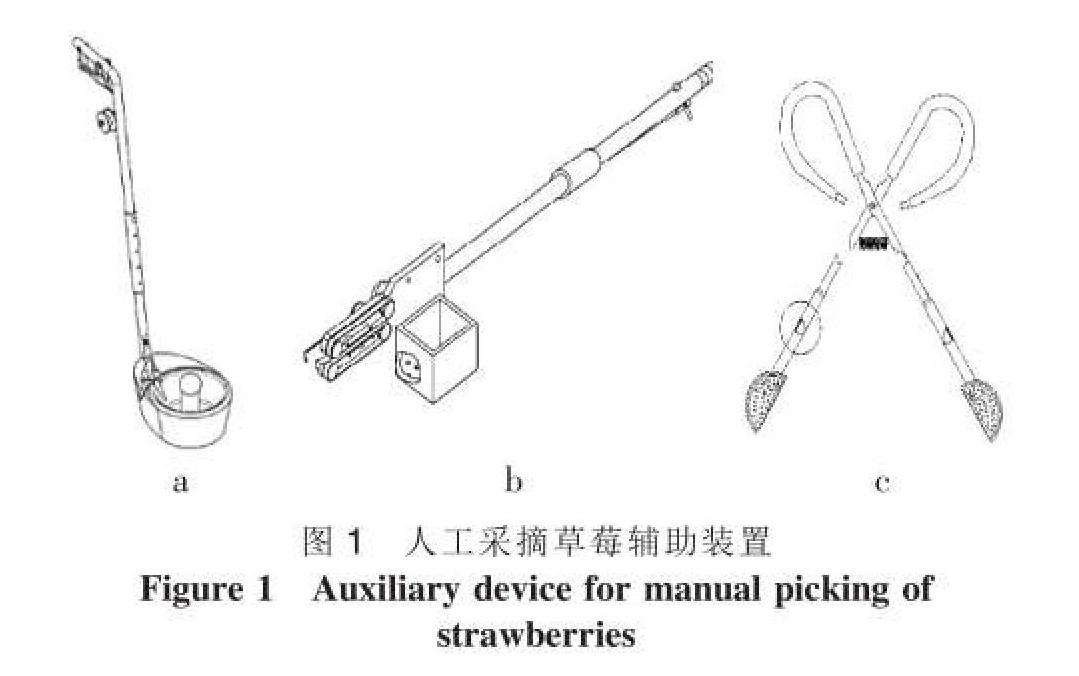
出于减少弯腰频次等降低劳动强度的考虑,研究人员设计出多种人工辅助采摘装置(如图1所示)。杜沛松等人设计一种可站立完成采摘收集一体化的草莓收获装置(图1中a),使用时根据自身身高调整伸缩杆长度,肉眼识别定位成熟草莓,将剪刀的开口对准草莓果梗,按下活动把手,活动把手连接钢丝绳驱动剪切机构完成果梗分离,果实在惯性力作用下落入收集装置,同时钢丝绳也驱动收集装置底部棘爪带动棘轮转过一定角度,防止果实在一个方向上堆叠;范晖等人设计一种手持式草莓采摘装置(图1中b),同样可以实现采收一体化,该装置采用直流电机驱动带传动,带传动与另一平带直接接触,通过调整带传动的张紧力等产生摩擦力带动平带同步运转,采摘杆前端的钩子勾住草莓果梗,扣动扳机钩子将果实和果梗向后拉扯,果梗进入两带之间并一同向后运动,传送带中部设有刀片切断果梗,两带夹紧部分果梗和果实输送进入收集装置;合肥某农业科技公司设计一种可改变长度的草莓采摘器(图1中c)(专利号201921120749.4),可根据工况调整草莓采摘器的两臂长度,剪勺内侧均设有刃口,工作时手动使两臂靠近剪勺包络住草莓,果梗被两剪勺内侧的刀刃切断,位于收集装置上方时在弹簧作用力下两剪勺打开,果实落入采收装置,完成采摘。
1.2 机械式采摘
虽然辅助装置在一定程度上缓解了人工劳动强度,但其采摘效率比不上人工弯腰采摘,没有从根本上解决劳动强度大、人工成本高、采摘效率低和工作环境差等缺点。因此,机械式采摘在草莓采摘中得到应用,相应地出现多种草莓采摘机械(如图2所示)。
杜国峻等人设计一种草莓采摘机(图2中a),机器由单电机驱动,电机驱动套筒旋转带动套筒上的两机械手爪,利用手爪双曲柄机构的急回特性和伸缩特性将草莓从地垄上挑起,使得果实与垄面分离,随着手爪进一步运动果梗被折断,果实被送入收集圆盘,收集圆盘在电机带动下作圆周运动,采摘的草莓随圆盘一起转动,圆盘两侧设有肋板防止果实掉落,待果实转到最高点处,在其自身重力和锥形滑台的作用下滑落,进入收集装置,大量试验证明平均作业效率為51.7个/min,采摘失败率为0.81%;窦艳涛等人设计一种吸入式草莓自动采摘装置(图2中b)(专利号201821882603.9),通过改变涵道的开关量和气流大小来改变涵道内气压,使内部产生一个低压,果实在气压的作用下被吸入,吸收筒上方设有凸轮剪切机构完成果梗分离,吸入的果实通过涵道进入传送带,运送至收集盒;陈逸青等人设计一种采收一体化草莓采摘装置(图2中c),通过采摘手柄末端电动切割锯片旋转完成果梗分离,果实落入导流网,网底设有传送链,果实被传送结构扬起并随链一起运动,最终进入承接盘。
1.3 机器人采摘
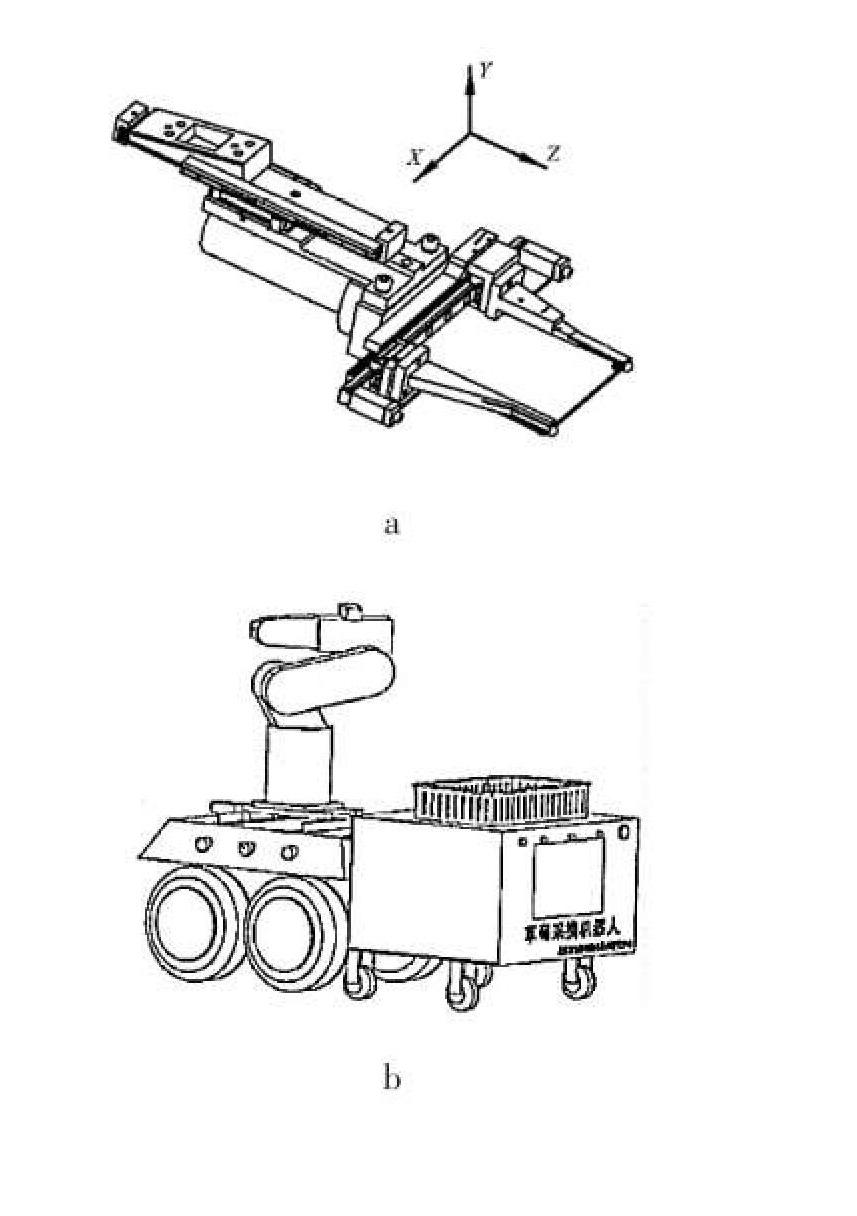
机械式采摘草莓效率得到一定的提升,动力源主要由电动机、柴油机等提供,但仍然需要人工花费大量时间参与其中,进行肉眼识别定位果梗、推动机器行走和手动完成收集等。因此,研究更加自动化、智能化、高效率的机器人采摘(如图3所示),以实现草莓高效率、高质量采摘。
王粮局等人研究机器人采摘草莓发现,果实重叠和枝叶遮挡等会影响识别效果,导致末端执行器定位不准确,因此设计一款大容差高效末端采摘器(图3中a),导轨与滑块的配合可以实现末端采摘器前后移动贴近垄壁,缓缓向上使果实进入两夹指和拢果绳之间,沿着Z方向后退一定距离,将草莓拉起,两夹指闭合完成剪切并夹住果实运动到收集装置,大量试验证明采摘器定位误差在±7 mm范围内,采摘成功率为97.70%以上;冯青春等人针对高架栽培草莓设计一款可自主导航、自动采摘的草莓采摘机器人(图3中b),采用机器视觉系统识别定位成熟草莓的空间位置,为机械臂轨迹规划提供依据,腰关节可旋转180 °实现对两侧同时采摘,末端采摘器采用“吸、夹、切”3步,首先为风琴式吸盘提供负压吸住果实,然后两手指在电磁阀的作用下闭合使电热丝通电,果柄在切割垫板与高温电热丝嵌合下被切断,保证果实的完好性并防止切口细菌感染,大量试验证明平均定位误差小于2.2 mm,单次采摘平均耗时10.99 s;刘志刚等人基于光程调节结构对草莓采摘机器人进行优化设计(图3中c),引入一种新的光定位方法,同时在运动控制中加入PID算法,提高了运动的稳定性,大量试验证明采摘破损率明显降低,最大漏采率仅为0.72%,满足精密采摘的要求。
2 草莓采摘机械存在的问题
2.1 机械结构设计仍需改进
辅助机械结构功能单一,其采摘效率不如人工弯腰采摘,实用价值较低,单一考虑劳动强度而忽视采摘效率不可取;机械式采摘为半自动化采摘,需要人工辅助,且采摘柔顺性差,草莓质地柔软极易发生损伤;采摘机器人结构设计冗杂,片面追求多自由度,忽视机械臂运动次数越多产生的振动和定位误差就越大,末端执行器柔顺性较差易对草莓产生机械损伤和对周围果实、枝叶造成影响。因此,草莓采摘机械结构应不断优化和改良,以满足草莓高效、无损采摘的需求。
2.2 采摘识别和定位不准确
草莓识别和定位对于草莓采摘机器人而言至关重要,其决定了机械臂的运动状态和位姿,间接影响采摘果实的品质。草莓的识别受到多种因素的影响,首先是自然环境的影响,包括采摘天气的阴晴、采摘时光线的强弱、采摘时是否有环境扰动等;其次是草莓植株本身的影响,包括果实重叠和茎叶对果实的遮挡、果实表皮有伤疤等,这对机器视觉的影响最大,难以实现对果实的精准识别;再次是机器本身对视觉的影响,包括行走结构产生的振动、机械臂运动过程中产生的振动和前一个草莓采摘完产生的振动等,这在一定程度上对视觉识别产生影响。草莓的定位高度依赖于草莓识别提供的三维立体坐标,同时也受机械臂运动精度的影响。
3 草莓采摘機械的发展趋势
3.1 机械结构趋于小型化与实用化
为了提高土地利用率和草莓产量,草莓种植的间距较小,因此对采摘机械提出小型化的要求。小型化机械一方面因整体小巧而可以在过道行走不伤害到植株,另一方面因结构灵活而可以降低枝叶遮挡等影响。无论是采摘机械还是机器人都应将采摘效率和果实完好率相结合,根据实际需求不断改进,逐步走向实用化。
3.2 控制系统趋于自动化与智能化
采摘机器人的控制系统主体分为机器视觉控制系统和运动控制系统两部分。草莓采摘机器人控制系统不断朝着自动化和智能化方向发展,为高效、无损草莓采摘助力。
参考文献
[1] 张曼,徐瑞峰,冯青春,等.单驱双夹式草莓末端执行器设计[J].农机化研究,2019,41(6):93-97,103.
[2] 杜沛松,杜娟,何延东,等.采摘收集一体化草莓收获机构的设计研究[J].农业科技与装备,2019(5):23-25.
[3] 范晖,李志晶,李明明,等.手持式草莓采摘收集一体化装置的设计[J].农机化研究,2020,42(7):94-98,110.
[4] 杜国峻,姚福林,曹建杰,等.地垄式单驱多果草莓人工辅助采摘装置设计[J].机械设计,2020,37(7):19-23.
[5] 陈逸青,邢玉龙.草莓采摘收集一体机实验分析[J].内蒙古科技与经济,2019(17):84-85,87.
[6] 刘志刚,王风燕,魏纯.精密草莓采摘机器人优化设计——基于光程调节结构[J].农机化研究,2016,38(6):16-20.
Research Status and Development Trend of Strawberry Picking Machinery
ZHU Qianfeng, LU Rongjian*, LU Jun, LI Fengshun
(College of Mechanical and Electronic Engineering, Nanjing Forestry University, Nanjing 210037, China)
Abstract: Research on strawberry picking machinery is of great significance to realize mechanization of strawberry production. This paper summarized the main methods of strawberry picking, analyzed the existing problems in the application of strawberry picking machinery, and pointed out the development trend of strawberry picking machinery in the future, in order to provide reference for the performance improvement, promotion and application of strawberry picking machinery.
Key words: strawberry; picking machinery; status; development trend
猜你喜欢
阅读与作文(小学高年级版)(2017年10期)2017-10-11
成才之路(2016年25期)2016-10-08
小学教学参考(语文)(2016年9期)2016-09-30
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28