量子密钥分发系统中抗扰动偏振编码模式的实验研究*
2021-10-08 08:55沈琦琦张毅王金东於亚飞魏正军张智明
物理学报 2021年18期
沈琦琦 张毅 王金东 於亚飞 魏正军 张智明
(华南师范大学信息光电子科技学院,广东省量子调控工程与材料重点实验室,广州 510006)
基于移动设备的自由空间量子密钥分发系统能够为实时全覆盖多节点网络提供有效的解决方案,然而该系统目前依旧存在着稳定性不足的问题,偏振编码器的抗扰动性在移动设备应用中非常重要.在扰动情况下保偏光纤的偏振保持特性将受到很大程度的影响,进而使得基于该特性的编码器的稳定性也随之受到影响.为解决扰动情况下偏振编码的稳定性问题,本文提出了一种双向差分调制模式,该种调制模式可以使基于双向回路的偏振编码器即使在扰动情况下依旧能够实现稳定编码.为此设计了双向差分调制的原理验证实验,实验在250 MHz的重复频率下进行,并使用200 Hz的振动来模拟实际扰动环境,在实验最后使用了商用雪崩型单光子探测器进行了持续2 h的测试,得到了在扰动情况下系统的平均量子比特误码率为0.36%,误码率波动范围不超过0.2%.
1 引 言
量子密钥分发(quantum key distribution,QKD)允许遥远的两个通信双方,通常称为Alice 和Bob,通过交换编码在单光子上的量子比特来共享安全密钥[1].OKD 与“一次一密”相结合,能够在理论上保证通信的安全性[2,3].
自从1984 年第一个QKD 协议提出以来,众多实验已被公开报道[4−6].在光纤信道中,光纤损耗及器件不完美等原因将限制QKD的安全传输距离.而由于光在自由空间中的低散射损耗,基于卫星的QKD 系统[7−9]将有望为建立全球规模的量子网络提供有效方法.进一步地,移动设备与卫星QKD 系统结合能够实现QKD 网络接入的灵活性,并且有助于构建全覆盖低成本的QKD 网络[10,11].
偏振编码是QKD 系统的主要编码方法之一,由于自由空间信道拥有良好的保偏性能,偏振编码成为自由空间QKD[12−14]的最佳选择.然而,现有的基于移动设备的自由空间QKD 系统仍存在稳定性不足的问题[15−17].一个具有长期稳定性和低量子比特误码率(quantum bit error rate,QBER)的偏振编码器对于存在扰动的自由空间QKD 系统至关重要.现有偏振编码器在稳定环境中已经表现出良好的性能[18−24],但在实际移动应用中将不可避免地会产生扰动,保偏光纤(polarization maintaining fiber,PMF)的偏振保持特性在扰动环境下将受到很大程度的影响,一些基于保偏光纤偏振保持特性的编码器稳定性也将随之受到影响.
因此,为了保证在扰动环境中偏振编码的稳定性,本文提出了一种双向差分调制模式,该模式可应用于双向回路系统中,使得编码器能够保持长时间稳定编码.为验证该调制模式的可行性,将其应用于本课题组提出的偏振调制单元(polarizationmodulated unit,PMU)[25]中并进行了原理验证实验,结果表明,在频率为200 Hz的扰动情况下该方案能够保持良好的偏振稳定性.同时,针对高重复频率情况下串扰对系统的影响问题,进一步提出了时域滤波和频域滤波的方法以降低串扰的影响.
本文的安排如下:第2 节给出在200 Hz 扰动情况下PMF的偏振保持特性分析并提出双向差分调制模式;第3 节结合PMU 对双向差分调制模式进行原理验证实验,并针对串扰问题进行处理;第4 节给出系统在无扰动和有扰动情况下的稳定性测试结果,验证了双向差分调制模式的抗扰动特性;第5 节给出本文的结论.
2 双向差分调制模式
由于一般机械振动的频率在几Hz 至500 Hz内,为了验证偏振编码器在实际场景中的稳定性,我们选择了200 Hz的振动频率来模拟常见的扰动情况,并测试了PMF 在该频率扰动下的偏振保持特性.在实验中,首先使用1 个能够输出在PMF快轴和慢轴上均有分量的确定线偏振态的激光器(LD100-D)作为光源,使用偏振分析仪(DPC5500)作为偏振检测装置,两个设备之间仅使用一根PMF 连接,同时在固定PMF的平面上施加200 Hz的低频振动.在连续30 min的测试中,PMF的偏振变化如图1(a)所示,可以发现,在存在扰动的情况下,光在PMF 快轴和慢轴上均有投影时其偏振态将产生较大偏移.随后,还测试了在扰动情况下光仅沿PMF 慢轴传输的情况.在实验中,用另一个激光器(KG-ELD-C33-10-M-FA)代替光源,该激光器输出光的偏振态仅在PMF的慢轴上传输,测试结果如图1(b)所示,由测试结果可知,光即使仅在PMF 一个轴上进行传输,但是在扰动情况下依旧无法很好地保持偏振状态.
我们知道对于一些基于PMF 保偏特性的编码器来说,需要被调制的脉冲分量仅在相位调制器(phase modulator,PM)一个轴上进行传输[18,19]或该脉冲在PM 两个轴上的投影分量相同[20,21],然而如图1的测试结果所示,当PMF 在扰动环境下,其保偏特性将受到很大程度的影响,进而导致基于该特性的偏振编码器稳定性不可避免地也受到影响.因此,本文提出一种基于法拉第镜(Faraday mirror,FM)回路的双向差分调制模式,在该调制模式下,被调制的分量脉冲往返经过偏振无关PM时,PM 对该部分分量施加两次完全相同的电压,使得PM 对该分量脉冲施加的总相位相同,进而实现稳定调制.接下来对双向差分调制进行理论分析.
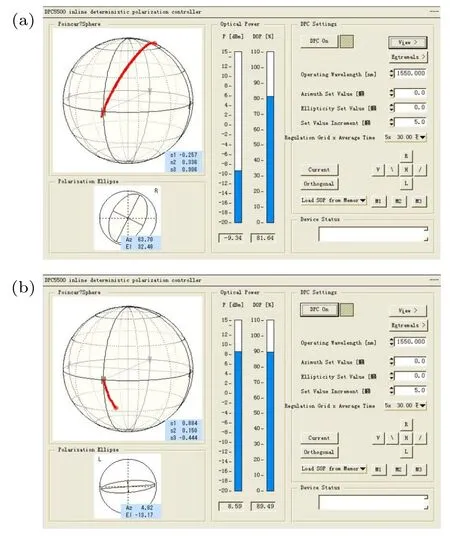
图1 PMF 在扰动环境下的测试,图中红线表示偏振态在邦加球上的变化轨迹 (a) 在扰动情况下,光在PMF 快轴和慢轴上均有分量的偏振态变化;(b) 在扰动情况下,光仅在PMF 慢轴上传输时的偏振态变化Fig.1.Testing of the PMF under a disturbance,the red line represents the change in the polarization state on the Poincare sphere:(a) Polarization state change with components on both the fast axis and the slow axis of the PMF under a disturbance;(b) polarization state change when light transmits only along the PMF slow axis under a disturbance.
首先,如图2 所示,对于大部分的相位调制偏振编码器而言,均需要保证输入到编码器的光脉冲偏振态为

图2 相位调制偏振编码方案Fig.2.Phase modulation polarization coding scheme.

其中|H〉和|V〉分别表示光子的水平和竖直偏振态.随后,脉冲经偏振分束器(polarization beam splitter,PBS)分成两个正交的偏振态,其中假设|V〉为需要被调制的分量.在稳定情况下,|V〉经PMF 传输到达PM 时,其偏振态不会发生变化,经过PM 后,该分量变为

其中φ表示PM 对|V〉分量加载的相位.如(2)式所示,PM 调制的电压将全部加载在|V〉分量上,由于此时从PBS 分束后的两分量脉冲振幅相同、偏振态正交且存在固有相位差,因此当两分量脉冲耦合时,其输出的偏振态将仅由PM 施加的相位决定.
然而在扰动情况下,PMF的偏振保持特性将受到很大程度的影响,此时如果不考虑偏振相关损耗,则到达PM的|V〉分量脉冲将会变为

其中 cosθ和 sinθ分别表示由于扰动导致|V〉分量脉冲的偏振变化后在PM 两轴上的投影分布,满足|cosθ|2+|sinθ|2=1;φ′表示脉冲在传播过程中两分量之间引入的附加相对相位,随后经PM 调制得到

其中φo和φe分别表示对偏振无关PM 施加电压时,对o 光和e 光引入的相移.由于偏振无关PM对o 光和e 光有不同的调制效率,因此有φeφo.
而另一分量脉冲|H〉的偏振态也将发生随机变化,若此时两分量脉冲进行耦合,得到耦合后的脉冲偏振态也将随机地发生变化.
同样地,若此时使用的是基于FM的双向回路系统,如PMU 方案[25].如图3 所示,脉冲经过FM返回至PBS 时,该回路结构能够自动补偿光纤中的偏振态变化,但是当该脉冲经过PM 时,该分量在PM 两轴上均有投影,而此时PM 对该脉冲两轴上的分量施加的相位和比例均不同,因此即使最终由于FM 自补偿特性将光纤中的偏振变化补偿回来,但该分量被PM 调制的相位将会持续变化,这也将导致两分量耦合输出的偏振态产生随机变化.
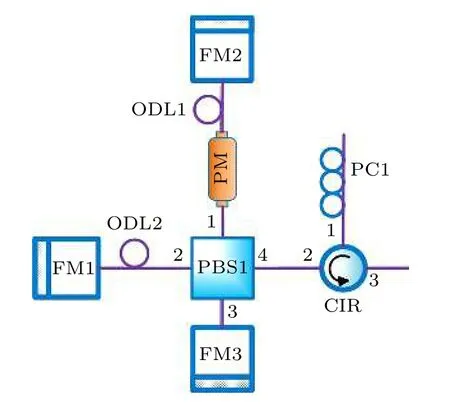
图3 PMU 结构示意图Fig.3.PMU structure diagram.
对于双向差分调制模式而言,在FM 回路系统中,通过控制时域调制信号,使得被调制的分量脉冲往返经过PM,PM 会对其施加两次完全相同的调制电压,具体调制方式如下.
在扰动情况下|V〉分量脉冲到达PM 被调制后,其偏振态变化如(4)式所示,随后该分量脉冲将继续沿光纤传输到达FM 处,被FM 操作,FM的作用算符为PˆFM=|H〉〈V|+|V〉〈H|,随后反射再次回到PM 处,此时该分量偏振态变化为

随后再次经过PM,在双向差分调制模式下,还需要对PM 再次施加相同的电压,此时得到该分量偏振态变化为

由于FM的自补偿特性,该脉冲再次返回到达PBS 时,其偏振态变化为

由(7)式可知,当两脉冲分量耦合时,输出的偏振态将仅由PM 加载两次相同电压得到的(φe+φo)决定.即在双向差分调制模式下,由于扰动的存在使得光脉冲经过光纤和PM 时,即使脉冲分量的偏振态产生了随机变化,但是凭借FM 自补偿特性及控制PM 在时域上的调制,即可实现稳定编码.
3 实验设置
PMU 是目前基于FM 回路系统非常稳定的编码器,根据编码器内部使用的光纤类型不同分为偏振相关调制和偏振无关调制模式[26]两种,这里以PMU 为例,将双向差分调制模式应用于PMU 中并进行实验实现.对于双向调制模式而言,无论PMU内部使用单模光纤(single-mode fiber,SMF)还是PMF 均能够实现稳定编码.
实验设置如图4 所示.一个高速皮秒脉冲激光器(LD100-D)输出一个波长为1550.15 nm的光脉冲,脉宽为100 ps,激光器输出后连接一个隔离器,以避免反射光进入激光器,随后经过一个手动偏振控制器(polarization controller,PC),调整输入到PMU的脉冲偏振态,然后经光环形器输入到PMU中.进入编码器后,光脉冲首先经过一个PBS,分为互为正交的两部分分量从PBS的两个端口输出,随后经过两个50∶50的分束器,分束器一端输出连接光功率计,用以实时监控输入偏振态的变化,另一端继续连接光路.3 个FM 用于将输入的光脉冲旋转至正交态反射回去,形成自补偿回路,PM 由1 个电脉冲发生器(EPG-210)和1 个射频放大器(DR-DG-12-MO)共同驱动,用以对目标光脉冲调制相位,两条光延迟线(optical delay line,ODL)用于调整从PBS 分离出的两个光脉冲的时间间隔,以及同一脉冲两次经过PM的时间间隔.光脉冲完成编码输出后,首先经过1 个光滤波器(filter,FI),将可通过的光波长范围调整至中心波长附近,用以降低系统串扰的影响.随后,采用可变衰减器将光脉冲的平均光子数降至单光子量级,然后经量子信道进行传输.PC 用于校准Alice 和Bob 之间的参考系,单光子探测器(single-photon detector,SPD)用于检测单光子信号.
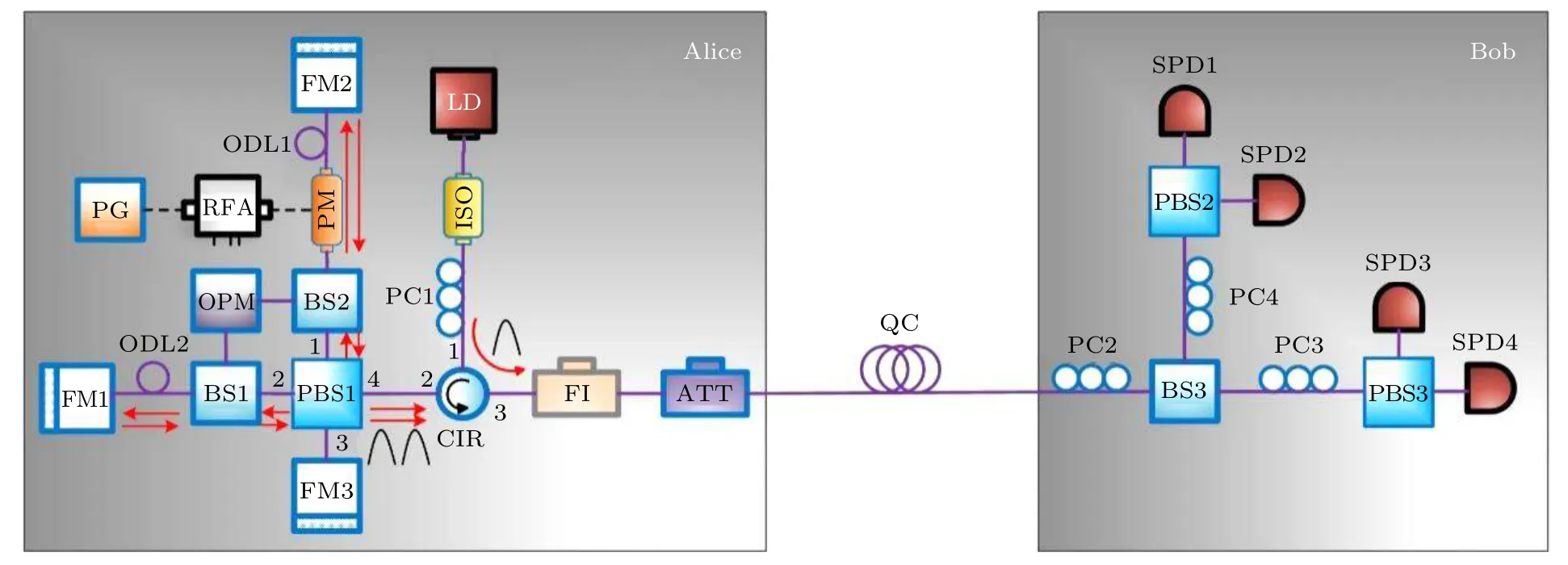
图4 双向差分调制模式在PMU上的应用,图中红色箭头表示串扰的方向.LD,激光二极管;ISO,隔离器;PC,偏振控制器;CIR,光环形器;PBS,偏振分束器;BS,分束器;PM,相位调制器;ODL,光延迟线;FM,法拉第镜;OPM,光功率计;PG,电脉冲发生器;RFA,射频放大器;FI,滤波器;ATT,衰减器;QC,量子信道;SPD,单光子探测器Fig.4.Application of two-way differential modulation mode to PMU,the red arrow in the figure indicates the direction of crosstalk.LD,laser diode;ISO,isolator;PC,polarization controller;CIR,optical circulator;PBS,polarization beam splitter;BS,beam splitter;PM,phase modulation;ODL,optical delay lines;FM,Faraday mirror;OPM,optical power meter;PG,electrical pulse generator;RFA,radio-frequency amplifier;FI,filter;ATT,attenuator;QC,quantum channel;SPD,single photon detector.
该实验关键是需要对编码器中各脉冲时序进行精确调节.首先对于双向差分调制而言,需要对被调制的脉冲经过PM 时加载两次完全相同的电压,此时有两种调制方法.首先,可以使得光脉冲分量往返经过PM 时均由同一电脉冲信号进行加载,此时需要该电脉冲信号足够宽或脉冲往返经过PM的时间足够短才行,然而宽的电脉冲信号需要系统降低重复频率,而往返经过PM 时间足够短则对器件尾纤有严格的要求,因此本文暂不考虑该种调制方法.其次也可以通过电脉冲倍频的方法进行调制,即将电脉冲的频率倍频到光脉冲频率的2 倍,通过调整ODL1的长度,使得脉冲往返经过PM的时间恰好被不同的电脉冲所调制,然后通过控制这两个电脉冲使得电压相等以实现调制.随后,对于PMU 而言,为实现编码,需要保证从PBS分束的两个脉冲之间存在固有相位差,因此还需要调节ODL2的长度,使得一个分量被PM 调制两次,另一分量完全不被调制.
该实验由于使用的SPD 是工作在门控模式下的商用InGaAs/InP 单光子探测器,其门控频率固定为1.25 GHz,因此需要将系统重复频率设置为1.25 GHz的整数分之一,在这里设置为250 MHz.同时为实现双向差分调制,电脉冲频率需为系统重复频率的2 倍,此处设置为500 MHz,并通过调节ODL1的延时,使得脉冲分量往返经过PM的时间间隔为22 ns,此时仅需要控制第n个和第(n+11)个电脉冲电压值相同即可.而两脉冲分量之间的相对延时也通过ODL2 调整至0.9 ns,可保证PM 加载电压时,另一脉冲完全不被PM 调制到.在这里,所有器件都通过SMF 连接,在环形器之前,使用PC 控制输入偏振态,随后对PM 施加四种不同的电压来调制45°偏振态|D〉、–45°偏振态|A〉、右旋偏振态|R〉和右旋偏振态|L〉.
此外,在系统重复频率较高的情况下,串扰对系统影响的概率将会增大,如图4 中红色箭头所示,由于器件的不完美系统将会产生额外的串扰.串扰主要来源于从CIR的P1端口输入直接从P3端口输出的部分脉冲,以及分别从PBS的P1和P2端口输出经FM 反射后直接从PBS的P4端口输出的脉冲.在系统高重复频率的情况下,该部分串扰将有很大概率会与信号光一起被SPD 检测到,从而导致系统误码率上升.因此,本文提出两种方法来解决串扰带来的影响.首先,由于从CIR 引入的串扰不会进入编码器内部而是直接进入信道中传输,以及经过PBS 引入的两部分串扰也仅经过编码器中的一条光路输出,因此可通过调整编码器内部的延时,在时域上将信号光与串扰光脉冲分离开,降低串扰的影响.此外,还可以使用FI 滤除除中心波长以外的其他波长,减少串扰的影响.本研究采用时域滤波和频域滤波两种方法滤除了系统约70%的串扰脉冲.在未来,将可以通过更加准确地调整编码器中光纤的长度以消除几乎所有的串扰的影响.
4 结果与讨论
在这个原理验证实验中,首次将双向差分调制模式应用到PMU,分别在无扰动和有扰动环境下进行实验.
整个实验装置安装在室内光学平台上,除实验室空调外,没有额外的温度控制.实验结果如图5(a)所示,其中SPD的固定探测门宽为300 ps,每个门内的平均暗计数率为 1.1×10−6,100 ns 死时间,检测效率约为23.6%.接下来,进行了持续2 h的测试,在没有额外控制的情况下得到系统平均QBER 为0.39%.而在调制四种偏振态时,施加在PM 上的电压值大小不同,调制|D〉态时加载的电压为0,此时QBER 最低仅有0.16%;而在调制|A〉时加载的电压值最大为Vπ,得到的QBER 最大为0.52%;同样地,在调制|R〉时其电压为负,大小与调制|L〉时相同,即调制|L〉和|R〉时所施加的电压分别为,这两种态的QBER 都为0.43%.
接下来对编码器施加一个200 Hz的振动,在持续施加振动情况下进行了连续2 h的实验.实验结果如图5(b)所示,可以看出,即使存在扰动,在双向差分调制模式下PMU 依旧能够保持长时间的稳定.实验结果与无扰动情况类似,因为调制四种偏振态时PM 施加的电压不同导致编码出的四个态QBER 也不同,|D〉,|A〉,|L〉和|R〉四种偏振态对应的平均QBER 分别为0.17%,0.50%,0.39%和0.38%,系统总平均QBER 为0.36%,而系统误码率的波动也保持在0.2%以内.
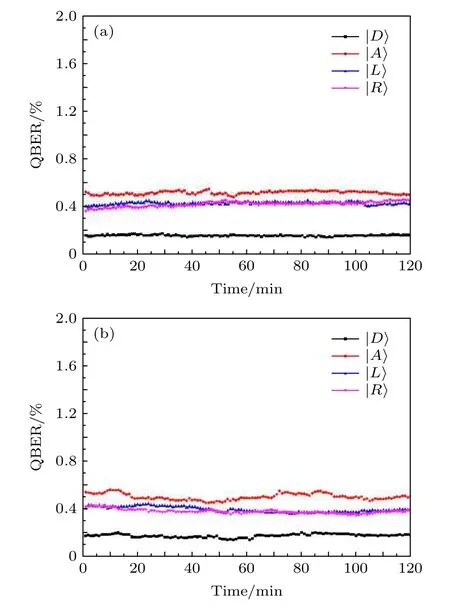
图5 在PMU 双向差分调制模式下,持续2 h 测试得到的|D〉 ,| A〉 ,| L〉 ,| R〉 四种偏振态的QBER (a) 无扰动情况下的QBER;(b) 200 Hz 振动情况下的QBERsFig.5.Measured QBERs of the four polarization states(|D〉,|A〉 ,| L〉 ,| R〉) for two hours under the two-way differential modulation mode applied to PMU:(a) QBERs in an undisturbed environment;(b) QBERs under a 200 Hz vibration environment.
该实验在光脉冲输入到PBS 之前使用了SMF连接.并且使用了手动PC 来控制偏振状态,这不可避免地会导致输入的偏振态无法很好地锁定.在未来可以将编码器应用于自由空间OKD 中,在自由空间信道中光子偏振态能够很好地保持,同时编码器本身具有强抗扰动特性,两者结合将有望解决基于移动应用的自由空间QKD 稳定性不足的问题.
5 结 论
PMF的偏振保持特性在扰动情况下将受到很大程度的影响,现有的基于PMF 偏振保持特性的偏振编码器的稳定性也会受到扰动的影响.因此本文首先讨论了在扰动情况下基于PMF 保偏特性的编码模式的稳定性,随后提出了一种能够在扰动情况下实现稳定编码的双向差分调制模式,并将该模式应用于PMU 进行了实验实现.实验结果表明,基于双向差分调制模式的PMU 能够在扰动环境下保持长期稳定编码,在扰动情况下系统的平均误码率为0.36%,误码率波动范围不超过0.2%.双向差分调制模式未来可应用于基于移动应用的QKD 中,为构建实时全方位覆盖的多节点网络提供了有效解决方案.
猜你喜欢
物理学报(2022年23期)2022-12-14
出版人(2022年11期)2022-11-15
网络安全与数据管理(2022年1期)2022-08-29
今日农业(2021年19期)2021-11-27
数学小灵通(1-2年级)(2021年10期)2021-11-05
中国惯性技术学报(2020年2期)2020-07-24
成都信息工程大学学报(2019年4期)2019-11-04
电子制作(2019年12期)2019-07-16
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15