
500 kN/2×160 kN 双向门式启闭机设计
2021-10-23 12:07李欣欣代新启
起重运输机械 2021年16期
李欣欣 杨 芳 王 兵 代新启
中国水利水电夹江水工机械有限公司 夹江 614100
0 概述
宗格鲁水电站位于尼日利亚宗格鲁镇东北的卡杜纳河上,其上游为已建成运行的希罗罗水电站,最大库容将近115 亿m3,调节库容27 亿m3,总装机容量700 MW,安装4 台175 MW 水轮机。一台宗格鲁进水口500 kN/2×160 kN 双向门式启闭机(以下简称门机)装设在引水发电系统进水口高程233 m的平台上,承担该电站进水口清污、设备启闭、设备检修等任务。该门机的500 kN 小车配液压抓梁承担进水口检修闸门的启闭及吊运,同时承担进水口快速事故闸门液压启闭机的安装及检修。门机在上游侧跨外设置有一种新型悬挂移动式2×160 kN 清污机(以下简称清污机),清污机吊具下挂清污耙斗用于4 台机组共16 孔拦污栅的清污,拆除清污耙斗,吊具下方安装拦污栅液压抓梁,同时具备拦污栅检修时起吊拦污栅的功能。尼日利亚宗格鲁水电站进水口平台设备布置如图1 所示。
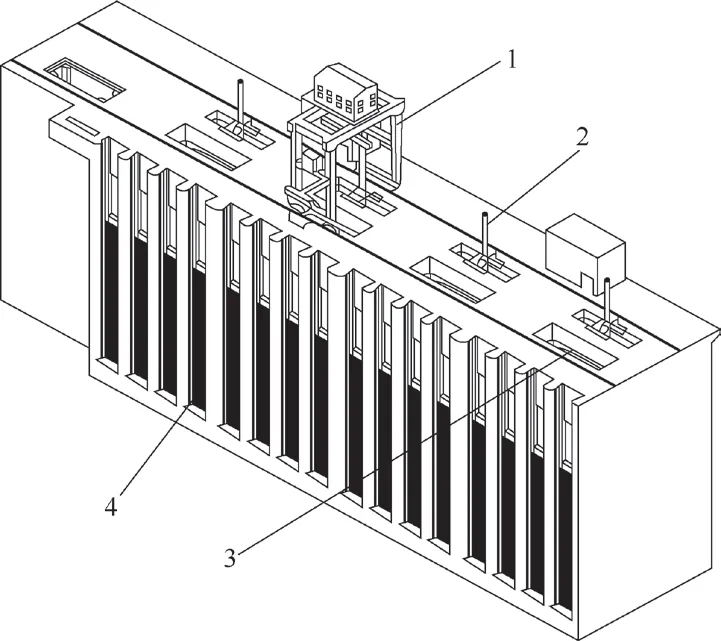
图1 尼日利亚宗格鲁水电站进水口平台设备布置
1 进水口门机
该门机主要由小车、门架、大小车供电装置、大车行走机构、大小车限位装置、梯子+平台+栏杆+司机室、轨道装置、清污机、控制系统和必要的附属设备等组成,可沿上下游方向行走的小车设置在门架上部平台轨道上,清污机设置在门架上游右侧门腿外侧。门机总体布置如图2 所示,门机主要技术参数如表1 所示。

表1 门机主要技术参数

图2 门机总体布置
2 小车
小车主要由起升机构、行走机构、小车架、抓梁电缆卷筒、机房、3 t 机房检修吊、防坠网和安全保护装置等组成。小车整体结构紧凑,小车架上的吊物孔距离机房边缘较近,常规电动葫芦为钢丝绳式,机房检修起重机因其本身结构无法移动到吊物孔位置,遂采用链条式电动葫芦。这种电动葫芦体积小,质量轻,性能可靠,单根链条下放即可满足3 t 机房检修起重机从坝面上吊装零星物品的要求。
2.1 起升机构
起升机构主要由电动机、硬齿面减速器、2 台液压盘式工作制动器、安全装制动器、带制动盘的联轴器、卷筒装置、定滑轮及载重传感器装置、动滑轮装置、平衡滑轮装置、高度限制传感器、重锤式限位装置等组成。起升机构为单吊点,由1 套卷扬系统组成,卷扬系统由电动机通过联轴器与硬齿面减速器高速轴连接,减速器的低速轴通过卷筒联轴器带动卷筒转动,卷筒上钢丝绳绕过定滑轮、动滑轮和平衡滑轮带动吊具起升,从而实现物品吊运。
1)电动机
门机运行的环境温度最高为50℃,设计规范要求电动机的选型要考虑海拔高度和环境温度对电动机功率的影响,电动机以环境温度和海拔高度为函数变量的修正值见图2。从图3 中可知,在海拔1 000 m 以下、环境温度50℃时,电动机功率的修正系数为0.92,根据起升速度、额定起升载荷及吊具质量、传动效率所计算的电动机净功率为22.3 kW,考虑修正系数后的电机功率为24.2 kW。综合考虑,最终选择电动机功率为26 kW,满足要求。
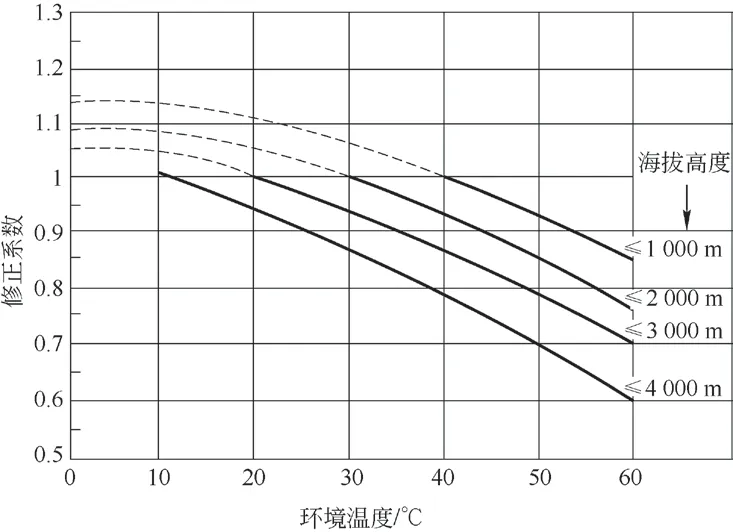
图3 以环境温度和海拔高度为函数变量的修正值
2)卷筒装置
采用双联焊接卷筒,绳槽采用螺旋线型单层缠绕,钢丝绳端头用压板螺栓固定在卷筒的两端。采用焊接式短轴卷筒,卷筒轴经滚动轴承支承于轴承座上,滚动轴承与轴承座端盖间预留一定的间隙,用于消除卷筒的安装误差。硬齿面减速器低速轴上安装有卷筒联轴器,卷筒联轴器通过法兰与卷筒腹板上的卷筒毂连接,卷筒联轴器可径向转动,消除卷筒重载时的变形。
3)制动器
在卷筒轴伸出轴承座端盖的端面安装有1 套包含主令控制器的起升高度限制传感器,主令控制器用于上下极限位置控制,高度传感器用于监测闸门的位置。在定滑轮装置处设置压式载重传感器,用于起升载荷的信号输出及过载保护。为防止动滑轮装置冲顶造成事故,在平衡滑轮装置旁设有重锤式限位装置。动滑轮装置在上极限位置触碰重锤式限制器后,起升机构断开电源,防止起升机构继续提升。减速器高速轴上装有2 台液压盘式制动器用于工作制动,在远离减速器侧的卷筒端部设有制动盘,在卷筒制动盘上装有1 套安全制动器,安全制动器延迟制动,减小制动冲击,避免发生溜钩事故。
2.2 安全防护措施
小车架上除在卷筒旁设有栏杆防止人员坠落外,还在卷筒下方设有防坠网,以防止小车上掉落工具,还可防止飞鸟进入小车机房内,保持机房内的整洁。
在非工作状态的暴风工况下,小车可能会被暴风吹动跨过门架中部而移动到下游侧,此时起升机构的动滑轮装置可能会与液压启闭机的液压缸干涉,造成事故。为避免出现这种情况,在小车端部设有支轨器,支轨器的刹车板下放至轨道上并施加一定压力,从而使滚动摩擦替换成滑动摩擦,防止小车移动。
3 悬挂移动式2×160 kN 清污机
清污机布置在门架上游右侧门腿的外侧,主要由2×160 kN 电动葫芦装置、支架、拉杆、铰轴、供电装置、限位装置等组成,清污机的工作范围为上游侧跨外7 m 至跨外2.5 m。2×160 kN 电动葫芦装置主要由2 台160 kN 电动葫芦、吊架、行走机构等组成,2 台电动葫芦对称布置,结构紧凑,安装空间小,顶部通过螺栓固定在吊架底部,吊架又通过铰轴与行走机构相连,行走机构的车轮悬挂在清污机支架两侧设置的轨道上。清污机支架靠近门腿侧通过铰轴连接在门架的中横梁和门腿上,支架另一侧通过铰轴与两个拉杆的一端连接,2 个拉杆另一端铰接在门架主梁端部和端梁上,清污机的拉杆和支架与门架间均为铰接,方便运输,现场安装便捷,且形成了三角形的稳定结构,受力明确,便于拉杆、支架、门架的分析计算。清污机的布置如图4 所示。

图4 清污机布置示意图
4 门机的联动控制
在进水口平台下游侧设有4 台液压启闭机,用于4孔4 扇进水口快速事故闸门的启闭,布置在距下游侧轨道中心2.9 m 处,液压启闭机液压缸高出轨面约10 m,门机吊点下游侧极限位置时至下游侧轨道中心的距离为2.5 m。小车起升机构至上极限时,门机动滑轮装置下挂的抓梁下吊耳中心至轨面的距离为11 m,亦即门机小车只在动滑轮装置位于上极限且抓梁不能下挂闸门时才允许运行至下游侧极限位置。为解决此问题,在门架主梁中部设有信号感应装置,与小车起升机构的载重传感器和高度限制器联合使用。在小车经过主梁中部触发信号感应装置后,PLC 读取载重传感器和高度限制器数据。在监测到小车起升动滑轮装置空载且处于上极限位置时,小车方可继续向下游侧行驶,且运行过程起升机构锁定无法下放动滑轮装置。
清污机在跨外7 m 处起吊额定载荷2×160 kN 时,加上其自重会对门机产生较大的倾翻力矩,而门机小车自重相对较轻,且门机跨度仅为11.5 m,为满足规范规定的门机抗倾覆稳定性要求,在不采取措施的情况需在下游侧增加配重用于平衡,这样会使下游侧大车车轮轮压增加。增加门机的大车轮压,即增加了门机轨道承重梁的负载,也意味着增加了投资成本。采用门机小车极限位置与清污机电动葫芦装置极限位置互锁的方式,门机小车与清污机的电动葫芦装置不同时工作。小车运行时,清污机电动葫芦装置必须停放在靠近上游侧门腿的极限位置;清污机电动葫芦装置运行时,小车必须停放在门机下游侧极限位置。在采取这种措施后,按照规范中门机抗倾覆稳定性的计算,得出门机下游侧的配重从35 t 减少到12 t,减重显著,具有良好的经济性。
5 大车行走机构
大车行走机构共设有4 组台车,每侧2 组对称布置,每组台车由支座、台车架、主动车轮组、从动车轮组等组成,共有8 个车轮组。台车车轮组采用45º剖分式结构,车轮组轴承座内孔与外圈采取偏心布置,通过转动轴承座可实现小范围调整车轮偏斜的功能,便于现场调整,使车轮处于最佳接触状态。台车架与支座之间通过铰轴连接,两者之间相对转动一定角度,可有效避免因轨道安装不平整导致的车轮悬空问题,支座通过螺栓固定在门架下横梁上。每个主动车轮的驱动装置采用1 套 “三合一”减速器封闭式传动,电动机处设置防雨罩。这种布置不仅能均衡各行车轮轮压,还能有效防止主动车轮在启动时打滑。
6 门架结构的计算
门机的关键受力构件主要为门架,结合常规的跨外悬臂门机和带回转吊门机的部分特点,既有相似点又有很大不同。设计手册中建议门机的悬臂长度l=(0.25~0.35)L,L为门机跨度,该门机跨外有效工作范围的悬臂为7 m,门机跨度为11.5 m,两者比值为0.61,远远超过设计手册的建议范围。常规的门机跨外额定起重量与主小车额定起重量比值一般较小,而该门机跨外有额定起重量2×160 kN 与小车额定起重量500 kN的比值为1:1.56。与常规的门机相比,该门机具有跨外额定起重量相对小车额定起重量比值大和跨外有效工作范围与门机跨度比值大的特点,对门架的设计要求较高。
当清污机跨外7 m 处起吊2×160 kN的额定载荷时,清污机的拉杆为主要受力构件,拉杆将力传递至门架的主梁和端梁,清污机支架通过铰轴将力传递至门架中横梁和门腿中部,主要工况下门架的受力情况见图4,主要工况下门架各铰点处受力大小见表2。图5 中的G1为小车自重,G2为门架自重,G3为清污机除电动葫芦外的自重,G4为电动葫芦的自重,G5为配重,F为额定载荷,S为拉杆铰接的门架主梁处受力,S1为拉杆铰接的门架中横梁处受的水平分力,S2为拉杆铰接的门架中横梁处受的竖直分力。常规的手工计算,并不能完全体现门架整体的应力、刚度以及局部的集中应力,有限元分析是目前行之有效的解决方法。
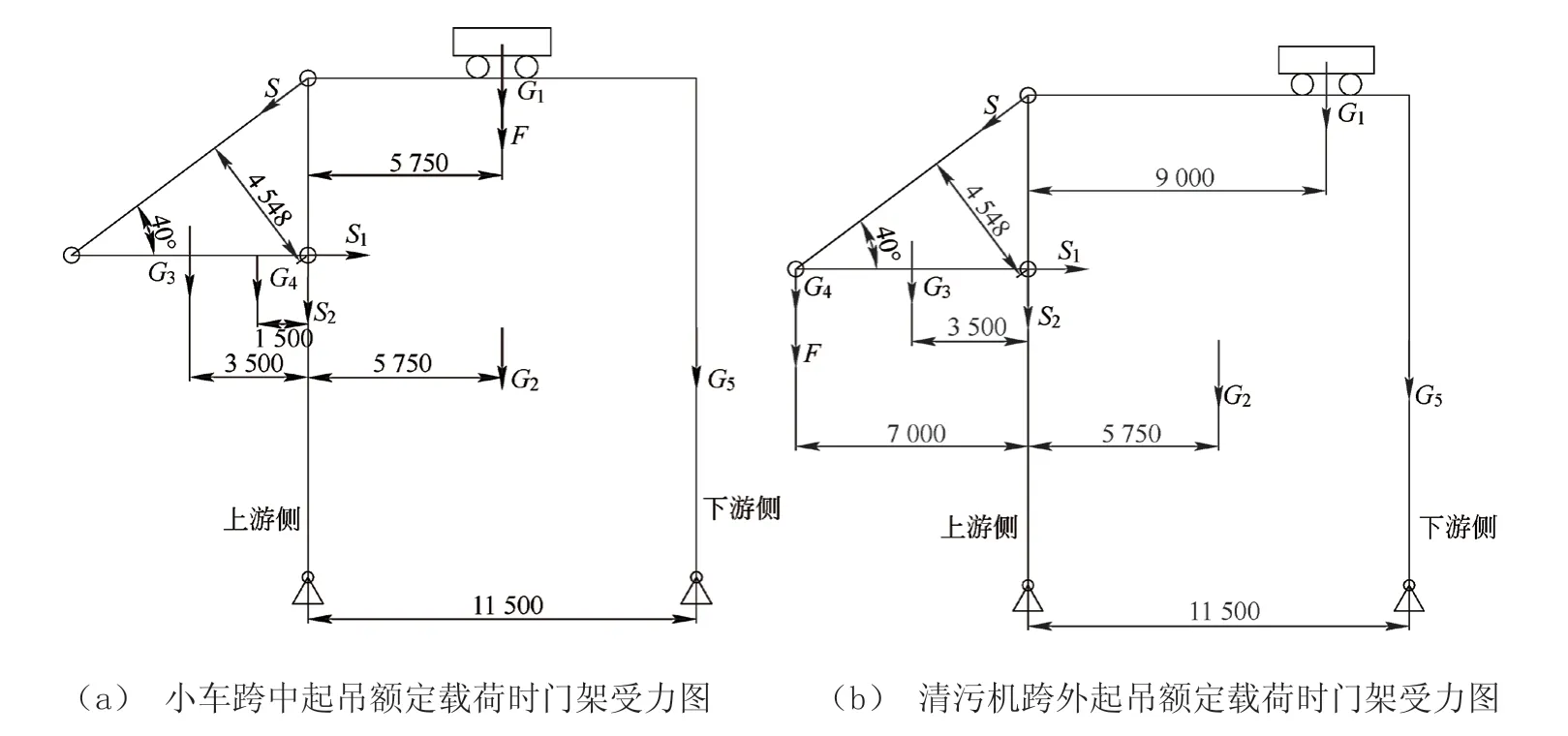
图4 主要工况下门架的受力示意

表2 主要工况下门架各铰点受力大小
6.1 门架结构
门机的门架结构主要由主梁、小车轨道、端梁、门腿、中横梁及下横梁等组成。主梁沿跨度方向布置,中、下横梁沿大车轨道方向布置。主梁采用偏轨箱形梁结构,主梁的主腹板采用2 种板厚的钢板对接而成,与轨道下翼板连接的主腹板局部选用加厚钢板,以减小局部区域挤压应力,远离高应力区域的主腹板,小车轮压对其板厚的选取影响不再加大,计算后选用较薄板厚的钢板可有效降低梁体的自重。为了保证上主梁与门腿之间连接节点的强度和刚度,在主梁与门腿连接处采用大圆弧过渡,与清污机拉杆连接的主梁局部做加强处理,以保证主梁的强度。小车轨道布置在主梁的主腹板板厚中心线上,通过压板固定。
端梁采用箱形结构,与主梁组成框架结构,整体制作,分体运输,两端通过高强螺栓与主梁连接成一体。
门腿共4 件,上下游各2 件,其中下游侧的2 件设置有灌注孔,用于混凝土配重的灌注。门腿采用箱形梁结构,在跨度平面内为上宽下窄的箱形断面立柱。门腿上端与主梁之间采用单片法兰焊接,下端与下横梁的上平面之间采用双法兰普通螺栓连接,下横梁的下端面与大车行走机构的支座用螺栓连接。在其基距平面内,门腿断面的宽度不变。
中横梁采用箱形梁结构,两端分别焊接在2 个门腿中部,设有2 个分段处,便于运输,分段处通过高强螺栓副与门架连接成一体。
采用有限元对门架各工况进行分析,然后优化设计得出合理结构。
6.2 门架的有限元分析
采用有限元法程序,经过软件计算,得到门架在小车跨中起吊额定载荷时的最大应力为113 MPa,出现在门腿与中横梁组合处,应力范围小,应力值小于规范要求的216 MPa;门架在清污机跨外7 m 起吊额定载荷时的最大应力为158.7 MPa,出现在门腿与中横梁组合处,应力范围小,应力值小于规范要求的216 MPa;小车跨中起吊额定载荷时,门架的最大变形为3.9 mm,跨度为11.5 m,比值为1/2 949,数值小于规范要求的L/1 000,门架的强度和刚度满足要求。门架计算结果云图见图5。
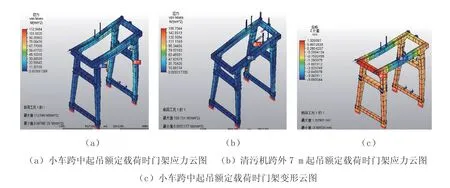
图5 门架计算结果云图
7 结论
通过研究小车起升机构及其高温环境下电动机的选型、悬挂移动式2×160 kN 清污机、大车行走机构等关键部件,分析了门架的受力特点,采用有限元软件对门架各工况进行计算,得出合理的门架结构,采用小车和清污机联动控制的方式,门机减重显著。设置必要安全防护措施,该500 kN/2×160 kN 双向门机的设计开发满足合同规定的参数及规范的要求,其关键技术得到用户的认可。本项目也提供了一种跨外新型清污机的设计思路,为后续的水电站启闭机提供了值得借鉴的经验。
猜你喜欢
中国交通信息化(2022年4期)2022-06-17
中国交通信息化(2022年4期)2022-06-17
起重运输机械(2021年24期)2022-01-11
建材发展导向(2021年15期)2021-11-05
交通科技与管理(2021年13期)2021-09-10
科学与财富(2019年8期)2019-10-21
汽车实用技术(2019年3期)2019-03-05
船舶与海洋工程(2018年5期)2018-11-14
军民两用技术与产品(2018年15期)2018-09-14
汽车实用技术(2016年10期)2016-11-21
