两栖装甲车驾驶模拟器视景系统设计与实现
2021-10-28 07:51谢云开孟祥辉张燕燕刘青峰李江江
软件导刊 2021年10期
谢云开,孟祥辉,张燕燕,刘青峰,严 亮,李江江
(1.海军研究院特种勤务研究所,北京 100072;2.哈尔滨工业大学 机电工程学院,黑龙江哈尔滨 150001)
0 引言
近年来,两栖装甲装备的科技含量越来越高,对驾驶人员的操作技能要求更加严格,训练成本也越发昂贵。为了提高训练效率,减少装备损耗,两栖装甲车驾驶模拟器成为有效的训练装备。装甲车辆驾驶模拟器通过构建虚拟的驾驶环境,仿真在各种天气条件、路况、海况下战车的行驶状态,使驾驶员能够基本掌握车辆的各种操作技能,为实车驾驶提供保障。为此,世界各国都非常重视装甲装备模拟训练,为装甲车辆的操作人员装备相应的模拟训练系统提供保障[1-2]。
视景系统是两栖装甲车模拟器的重要组成部分,用来为驾驶员营造一个真实的虚拟工作场景,提供训练所需的视觉信息。视景系统直接影响驾驶仿真的逼真性和训练效果。许多学者和工程技术人员针对视景系统的实现方法和实现效果展开了研究。其中,Vega Prime 以其高性能和高效率成为有效的实时视景仿真平台[3-6]。为此,本文选用Vega Prime 作为两栖装甲车驾驶模拟器视景系统的仿真平台,研究其实现方式。
对于装甲车辆驾驶模拟器,文献[7-10]实现了其视景系统开发,侧重于陆上驾驶环境的视景仿真。与普通装甲车辆相比,两栖装甲车辆驾驶模拟器需要同时满足水陆两种驾驶状态的需求,要能够真实地反映装甲车辆在各级海况下水上驾驶以及各种地形条件下陆地驾驶的运动状态。为此,水动力学仿真和高效碰撞检测成为系统实现的关键技术。对于碰撞检测,基于包围盒的检测方法较为有效[11-13],而两栖装甲车辆仿真计算负载较大,实时的碰撞检测方法有待进一步研究。此外,针对两栖装甲车辆的水动力学仿真直接关系到系统仿真的真实性,而相关研究较少。
鉴于此,本文基于Vega Prime,设计与实现了两栖装甲车驾驶模拟器视景系统,并针对两栖装甲装备的特点,研究了水动力学仿真和高效碰撞检测等关键技术,有效提升了视景仿真的逼真度。
1 视景系统设计
1.1 系统架构
视景系统由视景生成系统和视景显示系统两部分组成。视景生成系统负责完成所需场景图像的实时生成和渲染工作,它包括图形工作站(成像计算机)、视景数据库和视景仿真软件,决定着视景系统显示图像内容的丰富程度、逼真度、清晰度等技术指标。视景显示系统用来将视频信号转化成能够被人眼感知的光学影像,该部分常使用一些必要的光学设备来增加影响的品质和逼真度。视场角、亮度、对比度等技术指标主要由该部分系统决定,它还直接影响着系统的纵深感和沉浸感[1]。整个系统框架结构如图1 所示。
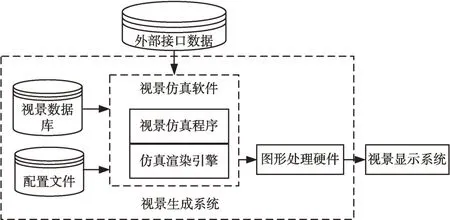
Fig.1 Frame structure of visual system图1 视景系统框架结构
其中,视景显示系统主要通过硬件实现,硬件的显示方式和性能指标根据具体需求确定。视景生成系统分为硬件与软件两部分,软件部分包括视景数据库和视景仿真软件,是系统开发的重点。图形工作站是软件部分的载体及开发和运行的硬件环境,它配合软件部分共同完成场景的实时渲染工作。
系统运行时,视景生成系统接收来自仿真计算机的位姿数据和来自指挥控制台的控制指令,遍历视景数据库,查询并选择所需的模型数据,或由仿真软件直接生成、解算仿真模型,然后对模型数据进行控制和处理,进而交由图形硬件处理数据,最终生成视频信号并输出给视景显示系统[2-3]。
1.2 系统功能
在驾驶员的视点位置,生成与模拟机运动相应的动态场景,完成相关的视觉效果模拟,并将相应的图像送往显示设备,为驾驶员提供高沉浸感的视觉信息。同时,视景系统与实时仿真计算机系统进行相关参数的数据交互,保证运动系统与视景系统同步。
根据两栖装甲车自身特点及项目需求,视景系统主要功能如下:①实时显示与模拟机位姿和场景设置相关的不同驾驶环境下的真实三维场景;②重点实现海上驾驶适应各级海况、陆上驾驶匹配各种地形的高逼真视景仿真;③实现天气效果模拟,具有白天、黄昏和夜间等工作模式,提供云雾、能见度、降水等特殊效果,可实现能见度等的数量特性变化;④能够响应指挥控制台的指令设置。
1.3 视景显示分系统
对于驾驶员闭舱视景显示分系统,由于其视场角需求较小,拟采用液晶显示器对视景系统生成的虚拟场景进行显示,实现原理如图2 所示。显示系统和观察窗通过锥形密闭框架连接,形成具有一定景深的显示系统。

Fig.2 Display system scheme图2 显示系统原理
闭舱驾驶视景根据观察窗的数量采用三套显示系统加以实现,视景系统的硬件结构如图3 所示,其采用一台视景计算机和三通道图形卡实现,视景系统和其它模拟机分系统共同连接在以太网上实现信息交互。

Fig.3 Display system topology structure图3 显示系统拓扑结构
1.4 视景生成分系统
视景生成分系统主要用于产生模拟所需要的各种场景,完成系统的功能要求,涉及视景数据库建模和视景仿真程序开发两个方面。视景数据库是对虚拟环境的描述,是以某种形式数据结构存储的环境数据信息。
场地模型的建模流程如图4 所示。首先根据需求,确定模型的位置、范围、属性等,完成模型规划工作;然后根据模型规划确定并获取所需的原始数据源,并对其进行处理和优化以满足建模要求。将原始数据源导入数据库建模工具,完成场地模型的建立与合成。建立后的视景数据库应当导入视景仿真环境以验证其是否能够达到系统规定的功能和性能要求,若未达到则再次利用建模工具对模型进行修正至满足要求为止。

Fig.4 Site model modeling flow图4 场地模型建模流程
基于Vega Prime 的仿真应用程序原理结构如图5 所示。仿真应用程序用来完成实时场景的生成和管理,响应实时仿真计算机传递的车体位姿信息、车辆操控信息等,依据视景数据库,自动生成与模拟机运动相对应的动态视景,并将相关参数反馈给对应的子系统[4]。程序的具体作用包括虚拟场景构建、场景驱动与渲染、模型动态调度和管理、碰撞检测及其响应、维护系统性能的加速算法实现等。仿真驱动程序应该能够高速逼真地再现仿真环境,实时响应交互操作。

Fig.5 Principle structure of simulation application based on Vega Prime图5 基于Vega Prime 的仿真应用程序原理结构
为保证开发的速度、质量和可维护性,视景仿真程序借助于商业软件开发平台进行开发。具体开发方法取决于特定的平台,该系统程序将基于Vega Prime 完成。MPI的Vega Prime 是世界上领先的应用于实时视景仿真、虚拟现实等领域的软件环境,用于渲染战场仿真、训练模拟器等的视景数据库。它提供跨平台、可扩展的开发环境,可用于高效的视景仿真应用开发,包括Lynx Prime 图形用户界面配置工具和Vega Prime 的基础VSG(Vega Scene Graph,底层为OpenGL)高级跨平台场景图形API[5-6]。Vega Prime 具有许多特性,包括自动的异步数据库调用、碰撞检测与处理、对延时更新的控制和代码的自动生成、可扩展可定制的文件加载机制、环境效果模拟等。配合其增强模块可以实现应用的特定功能。
2 关键技术与系统实现
2.1 水动力学仿真建模
两栖车辆在海上行驶时,车体与海水之间的相互作用是车辆在海面漂浮、摇摆的主要因素,要仿真车辆在各种海况下的运动,必须掌握车辆水动力学的建模仿真技术。车辆水动力建模的准确性将直接影响到整个模拟器的逼真度,为此在建立车辆的水动力学模型时,需要对模型的建立方法、建立措施进行必要研究,同时根据实车设计参数采用CFD 软件进行仿真,实现二者互补,保证模型建立的准确性和正确性。
(1)车辆水上运动受力分析。车辆在水中行驶时,所受外力如图6 所示,本文重点关注水动力和波浪力。

Fig.6 External force taken by the vehicle on water图6 车辆水上运动所受外力
(2)水动力(滑行平板理论)。由于两栖车辆在海上行驶时,首尾均有滑板进行车辆运动控制,因此运用滑行理论,建立平板或微弯曲板在流体中滑行时的动力学模型,进而实现滑板操作对车辆运动状态的仿真,使得车辆水动力学模型更加逼真,更加贴近实车的操作规律。
滑行理论:研究平板或微弯曲板在流体中滑行时的受力情况,进而解决各种实际滑行问题。有限滑行平板的滑行状态如图7 所示。

Fig.7 Sliding state of finite plate图7 有限平板滑行状态
其中,l表示平板长度;B 表示平板宽度;α表示冲角,即来流相对于滑行平板的运动角度;v0表示平板运动速度。
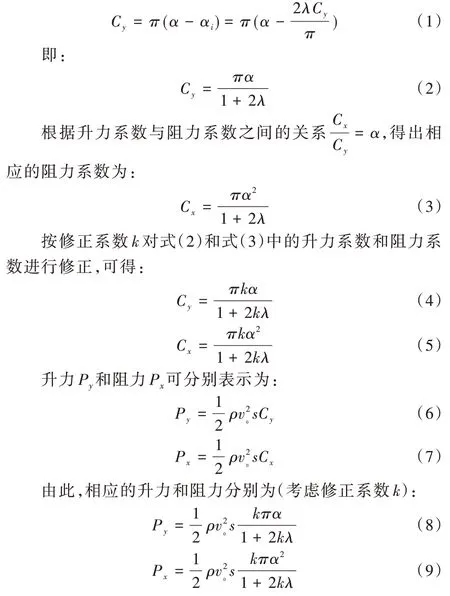
有限滑行平板沿宽度方向垂直于滑行平板任意截留的流动状态不完全相同,沿宽度方向平板两端的水流直接与大气接触,压力等于大气压力,而平板的底部压力大于大气压力,由此形成沿板宽方向的横向扰流。横向扰流导致平板底部压力损失,相当于有效冲角α减小,所减小的角称为下洗角αi。横向扰流的大小与浸湿长宽比λ=l/B有密切关系。浸湿长宽比越大,对横向扰流的影响越大,则下洗角αi越大。由于滑行平板下表面的水流流动和受力状态与薄翼下表面极为相似,受平板有限宽的影响,可采用机翼理论:对于无限翼展的平板薄机翼的升力系数Cyw=2πα,则有限翼展的下洗角为表示机翼展弦比。有限滑板的升力系数为Cy=πα,有限滑行平板的展弦比为下洗角为得出有限滑行平板升力系数为:
(3)波浪力和力矩计算。海浪基本分为两种:涌浪和风浪。由海浪模型可得到对浪高ξ 的描述。依据波浪理论得到相应的数学模型:
平面行进波(涌浪):


计算波浪力和力矩需要将海浪模型转换到车体坐标系中进行描述,由此给出车辆在海浪中的航行状态如图8所示。

Fig.8 State of vehicle sailing in waves图8 波浪中航行车辆状态
其中,c表示波速,即波浪传播速度γ表示航速v0与波浪传播速度c方向的夹角,顺浪γ=0°,逆浪γ=180°,斜浪γ=30°,横浪γ=90°;AB 表示波浪传播的波峰位置;v0表示车辆航速;λ表示波长。
运动坐标系中对海浪的描述:
ce表示波峰相对于车辆的传播速度,即波浪在车体坐标系中的运动速度,成为波浪的表观传播速度:

Te表示在车体坐标系中观察到的作用于车辆上的波周期,称为遭遇周期,与波浪的自然周期T相对应:

k表示波数,对于深水重力波,由海浪线性波动理论的深水弥散关系可得:

ω表示圆频率,ωe表示波的遭遇频率,与波浪的自然频率ω相对应,有:

可得车体坐标系下,涌浪遭遇波面升高ςe(t)和遭遇波倾角αe(t)仿真计算模型为:

随机海浪遭遇波面升高ςe(t)和遭遇频率αe(t)的时域模型为:

根据仿真模型可得到各自由度的波浪力和力矩为:

同理可得到其他自由度的力和力矩。
2.2 地形匹配与碰撞检测技术
为了实现车辆在陆地上的驾驶仿真,必须解决实时碰撞检测和地形匹配问题。地形匹配即保持运动实体与地面的相对位置关系正确,是一类特殊的碰撞检测和碰撞处理问题。运载实体(如汽车、装甲车等)在运动时,其姿态应随地形变化而高低起伏和左右倾斜,进而始终与地面保持合乎常理的相对位置关系。地形匹配问题主要是解决如何快速、准确地求解出运载实体和地面接触点的问题,以避免出现部分陷于地下或悬于空中等违背自然规律的现象,这属于碰撞检测的范畴[11-12]。为保证检测效率,本文采用基于射线的碰撞检测方法,即使用一组射线近似表示运动的物体,如图9 所示。
通过射线与虚拟场景的相交状态进行检测判断,当相交检测距离为0 时,则运载实体在地面上。如果该距离大于0,实体与虚拟场景没有接触;反之,当距离小于0,陷入环境中。碰撞处理依据该距离值完成,如果距离大于0,则使实体向下运动;反之,使实体向上运动。依此即可实现地形匹配。

Fig.9 Ray based collision detection图9 基于射线的碰撞检测
此外,为运载实体与虚拟环境其它部分的碰撞检测,需要对相关的几何模型进行相交性测试。为提高检测效率,采用基于包围盒的检测方法[13],即将运载实体和虚拟环境简化为简单几何体形式。为了进一步提高检测效率,采用层次碰撞检测进行加速,即使用包围体为每个模型创建一个层次表示形式。层次构建采用自上而下的方法,首先找到模型所有图元的包围体,作为树节点,然后分割成k(或者更小)个部分,即为k叉树的结构,如图10 所示。该检测算法采用递归调用的方式逐层检测。

Fig.10 Hierarchical structure of bounding volume图10 包围体层次结构
3 视景系统实验结果
视景系统硬件配置如下:HPxw9400 系列,四核酷睿英特尔5420 至强处理器;12MB 二级高速缓存;300GB(15 000 rpm)SAS 硬盘驱动器;NVIDIA Quadro FX 系列显卡,2G DDR-2 667MHz ECC 全缓冲内存。
视景系统实现效果如图11—图13 所示。图11 为驾驶过程中通过驾驶员观察窗观察到的视觉效果,驾驶场景为海滩,驾驶环境为陆地驾驶,图12—图13 为水上驾驶过程中观察到的虚拟场景效果。为更清晰地呈现水上驾驶场景,可将观察视点由驾驶员观察窗移至装甲车辆体外。可以看到,视景系统能够真实模拟装甲车辆水上驾驶的运动状态,包括海浪和行进过程中的浪花特效。视景系统能够满足装甲车辆行进过程中的虚拟视觉环境仿真需求,并且具有较好的真实感和沉浸感。

Fig.11 Observation effect of observation window图11 观察窗观察效果

Fig.12 Ocean simulation rendering图12 海洋模拟效果

Fig.13 Carrier entity in the process of moving图13 行进过程中的运载实体
4 结语
本文针对两栖装甲车辆驾驶模拟器,基于Vega Prime实现了其视景系统开发。针对两栖车辆的驾驶特点,研究了水动力学仿真和高效碰撞检测等关键技术,解决了两栖装甲车辆适用各级海况、陆上匹配各种地形等多样性驾驶需求带来的仿真难题,有效提升了其视景仿真的逼真度。该系统已应用于实际的驾驶模拟设备,对相关模拟器视景系统开发具有借鉴价值。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
铁道通信信号(2020年10期)2020-02-07
电子测试(2018年4期)2018-05-09
电子测试(2018年1期)2018-04-18
中国工程咨询(2016年12期)2016-01-29
装备环境工程(2015年5期)2015-02-28
舰船科学技术(2015年8期)2015-02-27