基于六自由度平台的船载波浪补偿系统控制策略研究
2021-10-30 06:59黄贤明
南京工程学院学报(自然科学版) 2021年3期
黄贤明
(常熟理工学院电气与自动化工程学院, 江苏 苏州 215500)
并联机构具有承载能力高、刚度大、结构简单、稳定性好、精度高的优点,是船载稳定平台的理想支撑结构.国外对并联机构的研究与应用起步较早,文献[1]对单通道为直流电机的Stewart平台进行了详细的动力学分析,并采用PID控制器进行控制.荷兰代尔夫大学已经将Stewart并联机构成功应用到海上引桥装置中,以保证人员在海上钻井平台与船舶间的安全通行.近年来,国内研究也逐渐增多,文献[2]通过运动学反解将对平台的位姿控制转为对6个液压缸的控制,这种控制策略虽然简单,但无法克服机构误差与位姿扰动,仅适用于对精度要求不高的场合.文献[3]提出了半闭环和闭环两种位姿控制策略,但是对多自由度跟随效果表现不佳.本文针对双层Stewart平台的控制策略进行研究,应用半闭环控制策略的同时,为解决位姿扰动、机构误差等问题,提出一种基于交叉耦合控制思想的闭环控制策略,利用运动学反解和雅克比矩阵实现位姿闭环控制,有效提高了控制精度.
船载波浪补偿控制系统可以简化为图1所示的两级六自由度平台,包含基座、船舶运动模拟平台以及波浪补偿稳定平台.上方的六自由度平台为波浪补偿分系统,下方为船舶运动模拟分系统.
因为船舶运动模拟分系统对控制精度要求不高,采用基于铰点空间的半闭环控制策略一般足以满足需求[4].但是针对波浪补偿分系统,采用半闭环控制很难克服机构误差,因此需要采用基于交叉耦合的全闭环控制策略.
1 基于铰点空间的半闭环控制
基于铰点空间的半闭环控制策略是将六自由度平台的每条支链看作是单输入—单输出系统[5],支链间的相互影响作为系统干扰,通过提高单通道的性能来改善六自由度平台姿态的控制性能.
图2为基于铰点空间的半闭环控制结构示意图,具体控制方法为:将位姿测量系统固定在波浪补偿稳定平台的中心,当船舶运动模拟平台运动时,稳定平台也与静坐标系产生相对运动,通过位姿测量系统测出此时的位姿,经过坐标变换得到波浪补偿稳定平台在静坐标系中的广义坐标,通过运动学反解可以得到波浪补偿系统中6条电动缸的期望伸缩量,通过单通道的位置控制,对船舶运动模拟平台产生的扰动有一定的隔离作用.控制结构原理如图3所示.
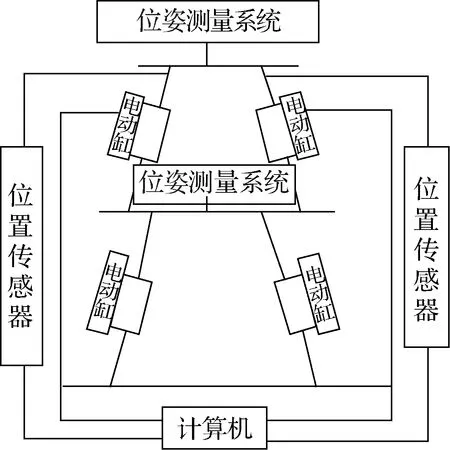
图2 基于铰点空间的半闭环控制结构示意图

图3 基于铰点空间控制的半闭环控制原理图
本文在Matlab/Simulink环境中建立如图4的船舶波浪补偿系统仿真模型,采用基于铰点空间的半闭环控制策略,通过SimMechanics进行动力学建模.
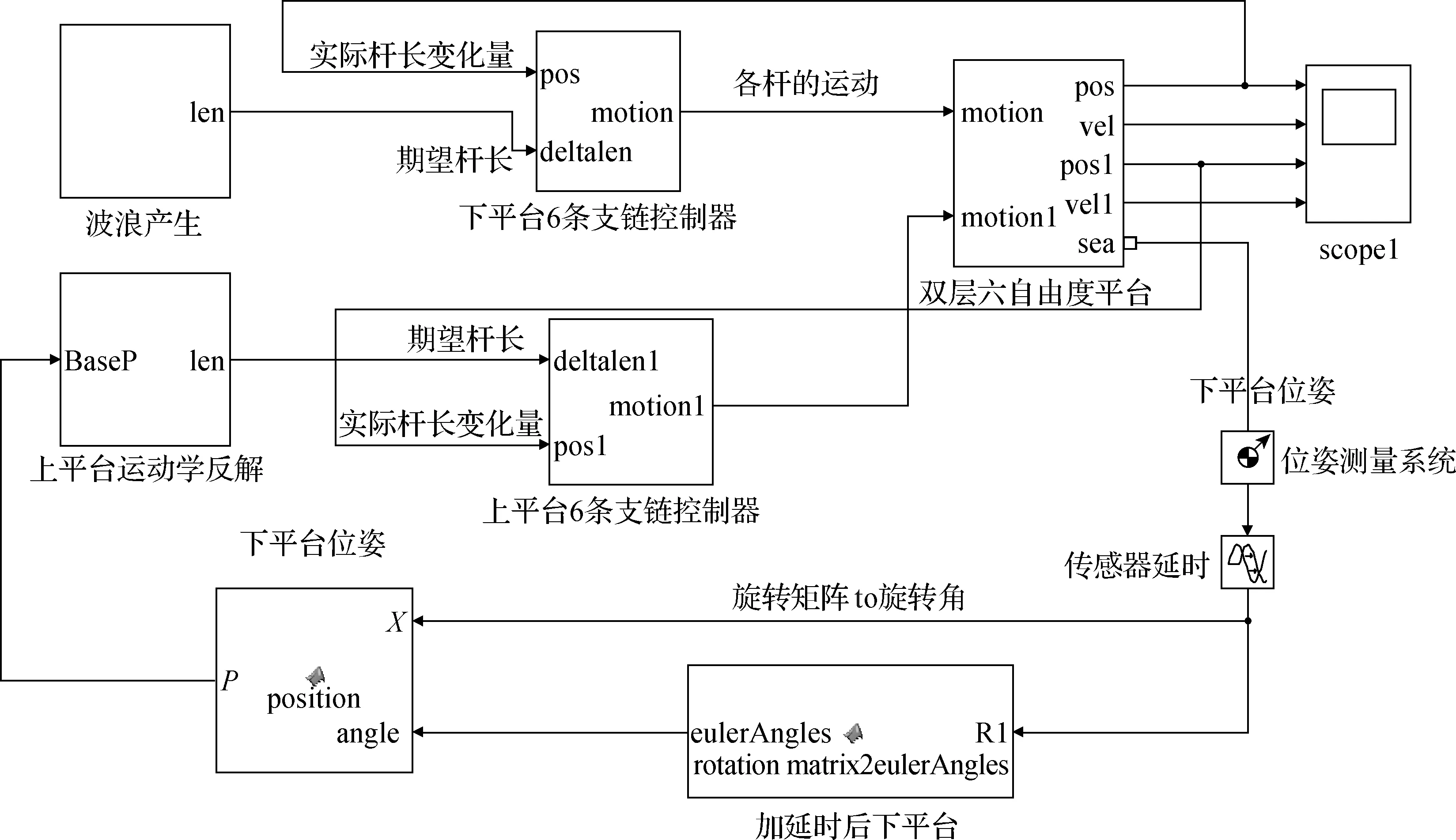
图4 船舶波浪补偿控制系统仿真图
图4从功能层面可以划分为7个模块:1) 波浪仿真模块,主要用于产生波浪信号,并通过船舶运动模拟平台的运动学反解得到期望的杆长变化量;2) 下平台6路控制模块,以期望的杆长变化量以及实际的杆长变化量作为输入,通过以自抗扰控制器作为位置环的三环结构单通道电动缸伺服系统将杆的位置、速度与加速度信息传送给执行机构;3) 系统主体模块,包括了一级平台(船舶运动模拟平台)和二级平台(波浪补偿稳定平台),通过由2)得到的6条支链的位置、速度与加速度信息来驱动6条杆的运动;4) 位置传感器以及信号处理模块,将船舶运动模拟平台的重心连接到位置传感器,输出为船舶运动位姿平台重心处的位置信号以及旋转矩阵,通过RotationtoAngle模块将旋转矩阵转换为角度,与位置信号一同构成船舶运动模拟平台的位姿信号;5) 波浪补偿稳定平台运动学反解模块,根据反解算法得到稳定平台期望的杆长的变化量;6) 上平台6路控制模块,与下平台的6条支链的单通道控制系统功能相同,以期望的杆长变化量以及实际的杆长变化量作为输入,通过以自抗扰控制器作为位置环的三环结构单通道电动缸伺服系统,将杆的位置、速度与加速度信息传送给执行机构;7) 示波器模块,根据观测需要观测的波形,适当选择.
船舶运动模拟分系统以及波浪补偿分系统运动学反解模块子系统如图5、图6所示.
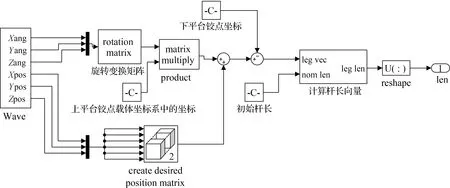
图5 船舶运动模拟分系统运动学反解模块子系统
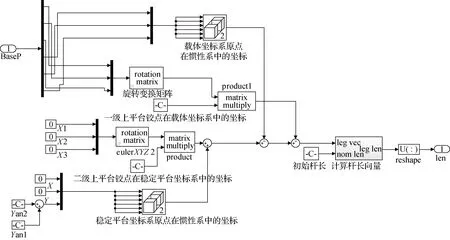
图6 波浪补偿分系统运动学反解模块子系统
系统执行机构为双层Stewart平台使用Simulink的SimMechanics工具箱[7]搭建,可视化窗口如图7所示.
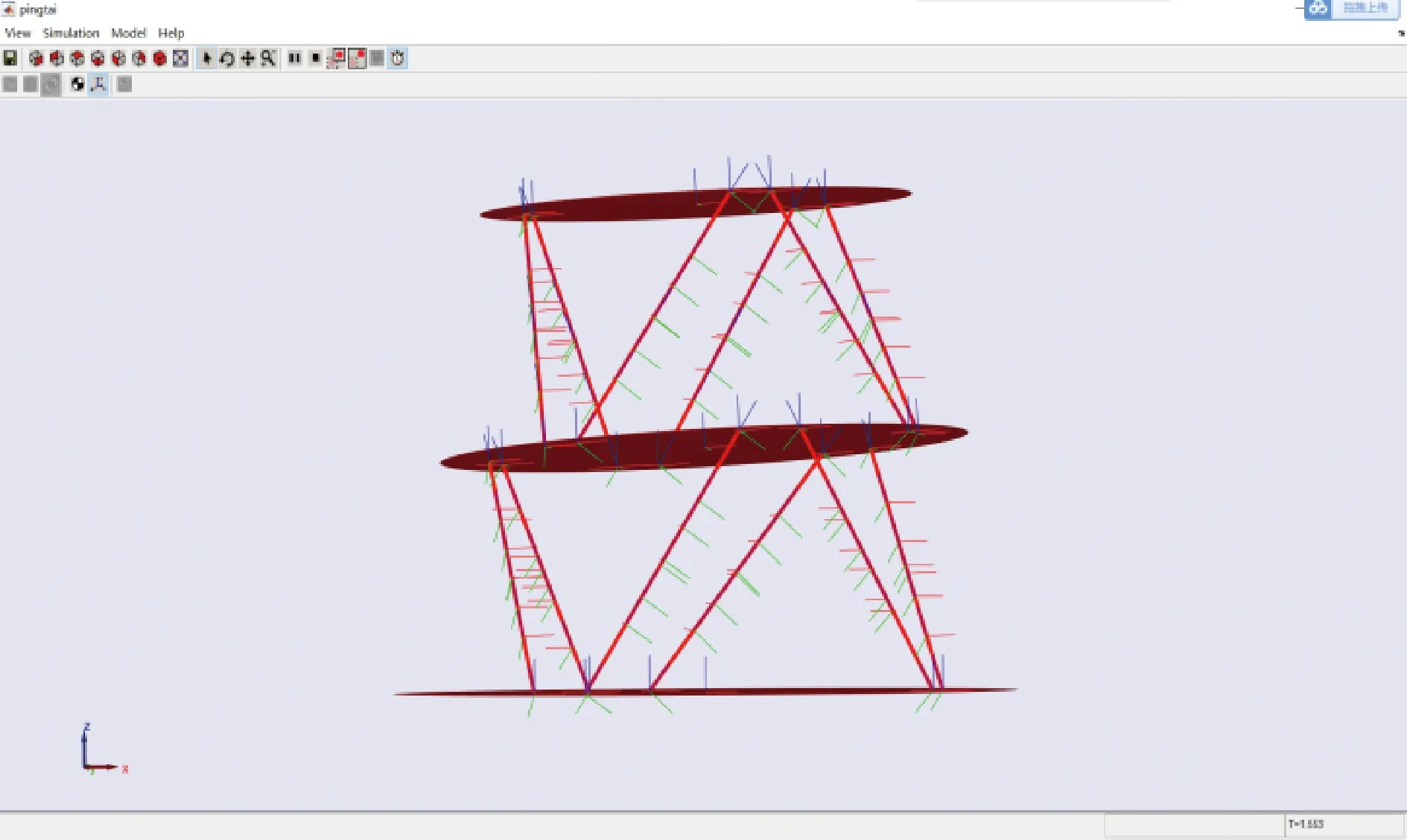
图7 系统3D模型与SimMechanics可视化窗口
2 基于交叉耦合的全闭环控制
交叉耦合控制策略是建立在铰点空间控制策略的基础上的.在铰点空间控制中,虽然六自由度平台的每个电动缸位置环均为闭环,但是对于稳定平台的位姿而言却是开环控制.交叉耦合控制[8]通过在稳定平台的上平面安装惯性导航系统,获取上平台的位姿,与设定值作差值,形成位姿的闭环回路,再通过运动学正解的雅可比矩阵得到6个支链电动缸的伸缩量,从而实现更高的稳定精度.控制算法框图如图8所示.
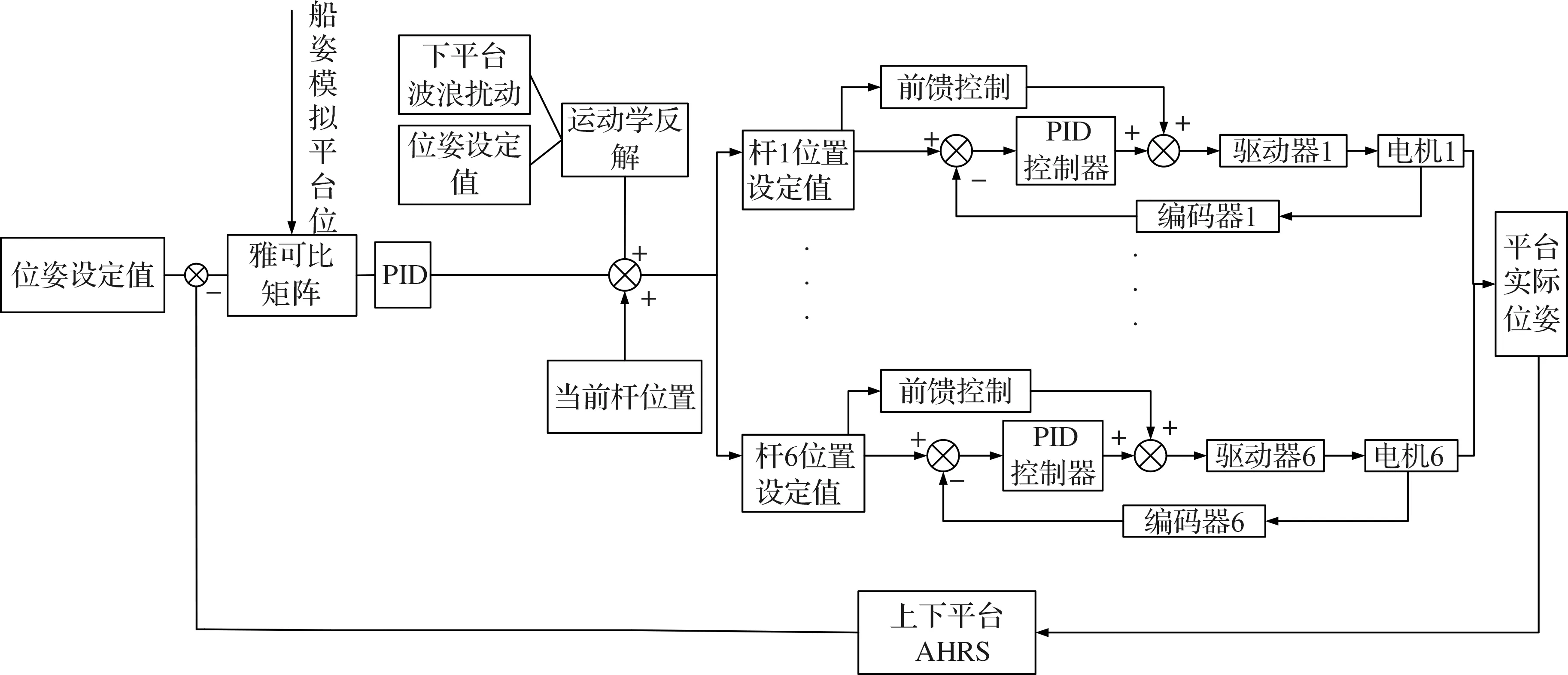
图8 基于交叉耦合的全闭环控制策略
船舶运动模拟平台主要作用是模拟船舶在海上航行时的位姿,为波浪补偿分系统提供扰动,对于位姿的控制性能要求较低.与船舶运动模拟平台不同,波浪补偿稳定平台对系统的快速响应以及稳定精度的要求更高,因此对图8做出改进,基于交叉耦合的全闭环思想搭建如图9所示仿真图[9].

图9 基于交叉耦合的两级并联稳定平台仿真模型
3 仿真与对比
船舶海上作业受海浪的影响会产生六自由度的运动[10],分别为横滚角Roll、俯仰角Pitch、偏航角Yaw、X轴位移x,Y轴位移y以及Z轴位移z.据统计,一级及以上海况的运动频率一般低于1 Hz[11],因此仿真输入信号选择1 Hz以下.
在铰点空间控制策略下,对船舶运动模拟平台设定Roll、Pitch和Yaw分别为3°、4°、5°的幅值,频率为0.2 Hz的正弦信号.初始时给定Z轴方向位移为0.1 m,在1 s时,给定X轴方向位移为0.1 m.输出曲线如图10、图11所示.
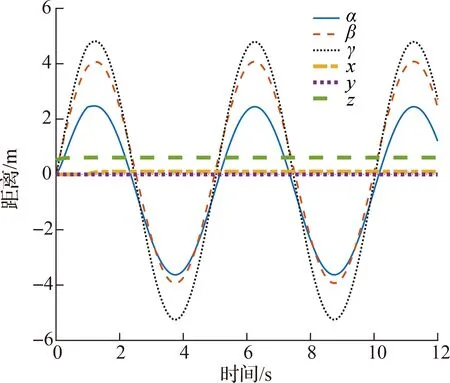
图10 基于铰点空间的船舶运动模拟平台跟随曲线

图11 基于铰点空间的船舶运动模拟平台跟随误差
结合图10和图11,在多自由度情况下,基于铰点控制策略的船舶运动模拟平台控制精度较低,对其他自由度还有一定的影响.
在交叉耦合控制策略下,对波浪补偿稳定平台给定同样的设定值,输出曲线如图12、图13所示.
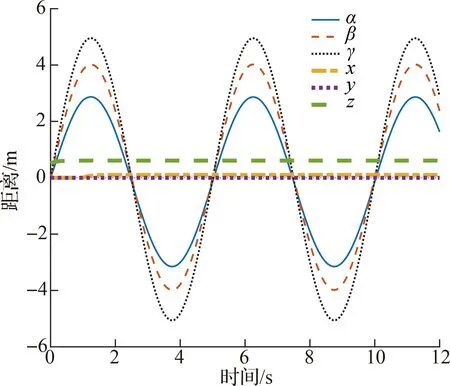
图12 交叉耦合下波浪补偿稳定平台跟踪曲线
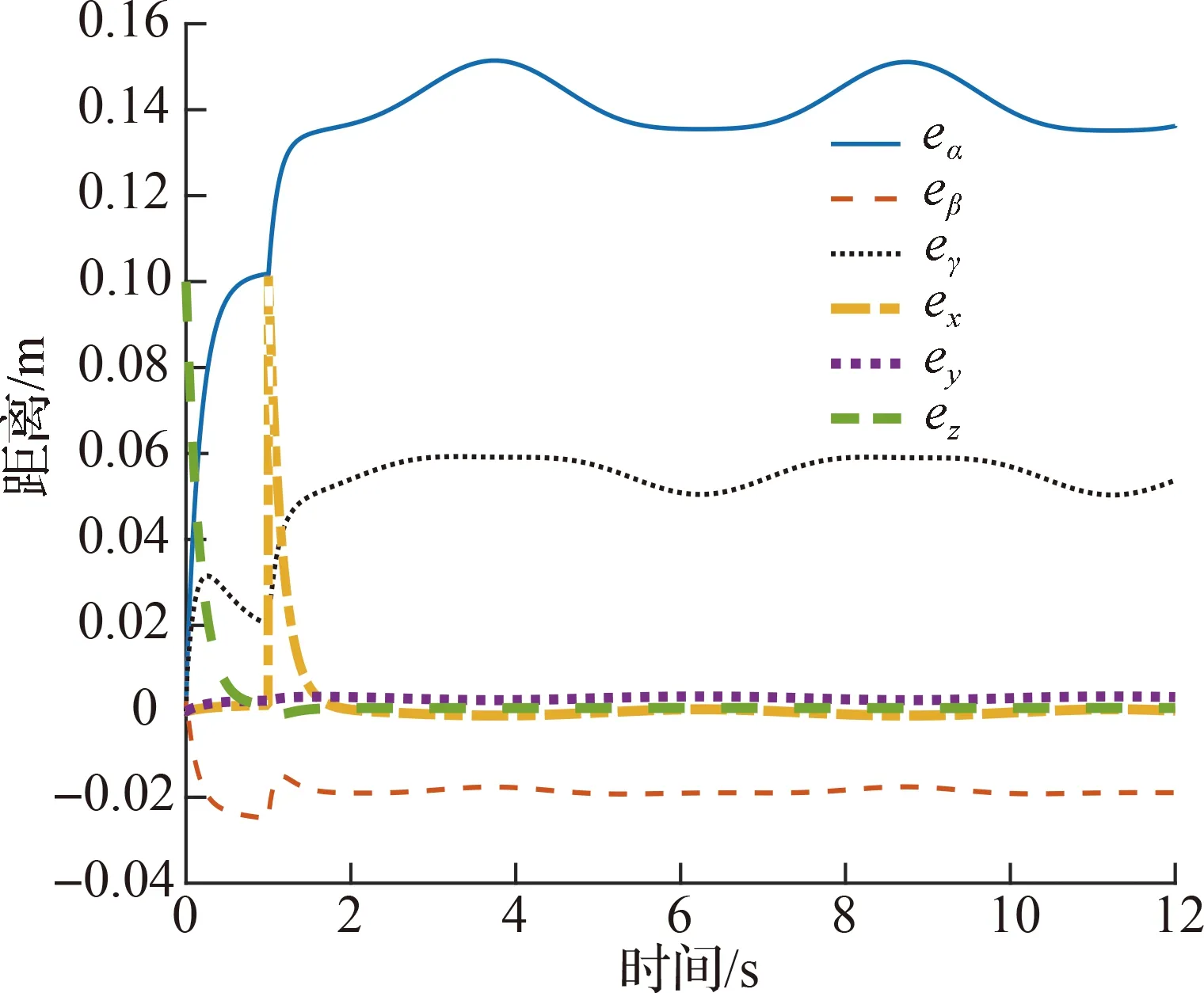
图13 交叉耦合下波浪补偿稳定平台跟踪误差
基于交叉耦合控制策略的全闭环控制比基于铰点空间的半闭环控制跟踪误差降低了近5倍,大大提高了控制精度和跟踪性能.
船舶运动模拟平台在系统运行3 s后,设定Roll、Pitch和Yaw分别为8°、10°、12°的幅值,频率为0.2 Hz的正弦信号,波浪补偿稳定平台采用基于交叉耦合的全闭环控制,稳定效果如图14所示.
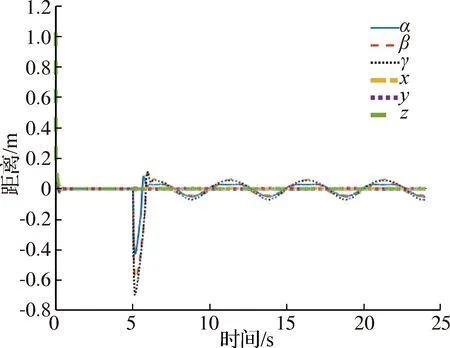
图14 波浪补偿稳定平台稳定效果
从图14中可以看出,稳定平台最大角度偏差为-0.7°,稳态误差仅有0.06°,在基于交叉耦合的全闭环控制下,波浪补偿稳定平台具有较好的稳定精度,有效克服了模型误差和位姿扰动.
4 结语
本文针对船载波浪补偿系统的船舶运动模拟平台和波浪补偿稳定平台分别设计了不同的控制策略.传统的半闭环控制策略设计简单,但是无法克服机构误差和位姿扰动,因为本文提出了一种基于交叉耦合思想的全闭环控制策略,利用运动学反解和雅克比矩阵实现了位姿的闭环控制.仿真试验说明,基于铰点空间的半闭环控制适合控制精度要求不高的场合,比如用来模拟船舶在海上的运动位姿;基于交叉耦合的全闭环控制策略大大提高了控制精度,适用于精度需求高的场合,比如稳定平台.
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
北京航空航天大学学报(2022年5期)2022-06-06
现代信息科技(2020年22期)2020-06-24
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
山东工业技术(2019年16期)2019-07-19
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2018年11期)2018-08-04
科技与创新(2018年12期)2018-06-22
电脑知识与技术(2016年18期)2016-11-02