
基于Comsol的径向电磁轴承设计分析系统开发
2021-11-01 01:23祝丽莎王小虎
机械与电子控制工程 2021年3期
祝丽莎 王小虎

*通讯作者:祝丽莎,1985年3月,女,汉族,四川眉山人,现就职于成都四威高科技产业园有限公司工程师,本科。研究方向:装备设计和自动化。
摘要:电磁轴承的结构设计受到安装空间、软磁材料性能、线圈绕组结构等多种因素限制。在实际应用中,要设计出达到承载力目标而又满足各类限制的电磁轴承结构往往需要通过大量计算获得关键参数,建立电磁轴承虚拟样机,再利用仿真分析等手段验证设计参数是否合理,整个流程往往需要多次迭代,设计效率较低。基于Comsol软件,开发了一套针对径向电磁轴承的自动设计及分析系统。本系统可以依据输入的承载力目标和边界条件,自动完成参数计算、几何模型生成和有限元仿真计算,有利于快速获得设计结果并进行评估,极大地提高了设计效率,同时降低了设计人员的工作量,有利于快速确定电磁轴承的结构方案。
关键词:电磁轴承;设计;分析;系统开发
一、引言
电磁轴承利用电磁力提供转子支承力,可以使转子无接触、无摩擦地悬浮运转,从而使转子的运行效率得到极大提高[1–4]。传统转子支承,如滚动轴承、滑动轴承、气浮轴承等主要依靠机械力支承转子,而电磁轴承利用电磁力支承转子,是一类典型的机电一体化产品,涉及到转子动力学、机械结构、电子技术、控制理论等多学科的综合运用[5]。在设计电磁轴承,特别是径向电磁轴承时,需要考虑轴承安装空间、轴承承载力、线圈绕组尺寸、软磁材料性能等各种因素,使得设计过程较为复杂。此外,在完成参数设计后,若需要分析轴承的电磁场、电磁力等,又需要投入大量仿真建模和计算。如果要优化参数,则可能出现多次“设计—仿真”的迭代,导致工作量较大、设计效率较低。
为此,本文基于Comsol开发了一套实现径向电磁轴承参数设计和建模仿真的设计分析系统。该系统以设定承载力为目标、以轴承径向空间为约束,能较好地实现径向电磁轴承的参数设计。在参数选定后,又能快速构建电磁轴承几何和仿真模型,实现电磁场分布和轴承力的仿真。
二、径向电磁轴承工作原理
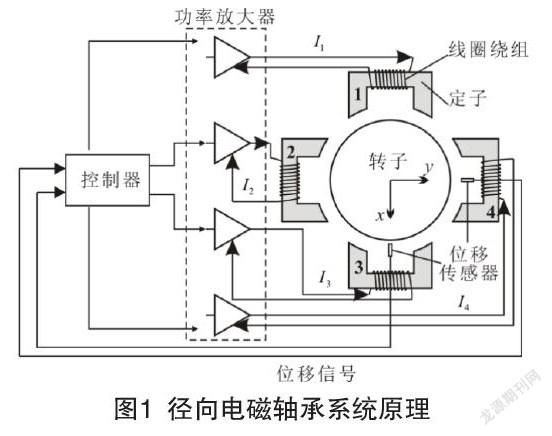
电磁轴承最基本的工作原理即为利用电磁吸力作用在转子上,克服转子重力、不平衡力和其他作用在转子上的力,使转子保持悬浮并稳定运转。一般径向电磁轴承的工作原理如图1所示[6]。轴承定子和转子由软磁材料制成,当定子上线圈绕组通电后,定子和转子间气隙将存在电磁场,该电磁场在转定子间产生吸力,提供轴承的支承力。由于电磁吸力是不稳定力,故需要人为控制励磁电流。
为此,在轴承中设置有位移传感器,用于检测转子相对轴承的位置。位置信号送入控制器进行计算,按照一定的控制算法调整控制电流,经功率放大器放大后,输送到定子绕组。所以电磁轴承支承的悬浮转子系统始终处于动态平衡当中,当有外部激励改变转子状态时,系统都将作出响应,确保悬浮转子的平衡。
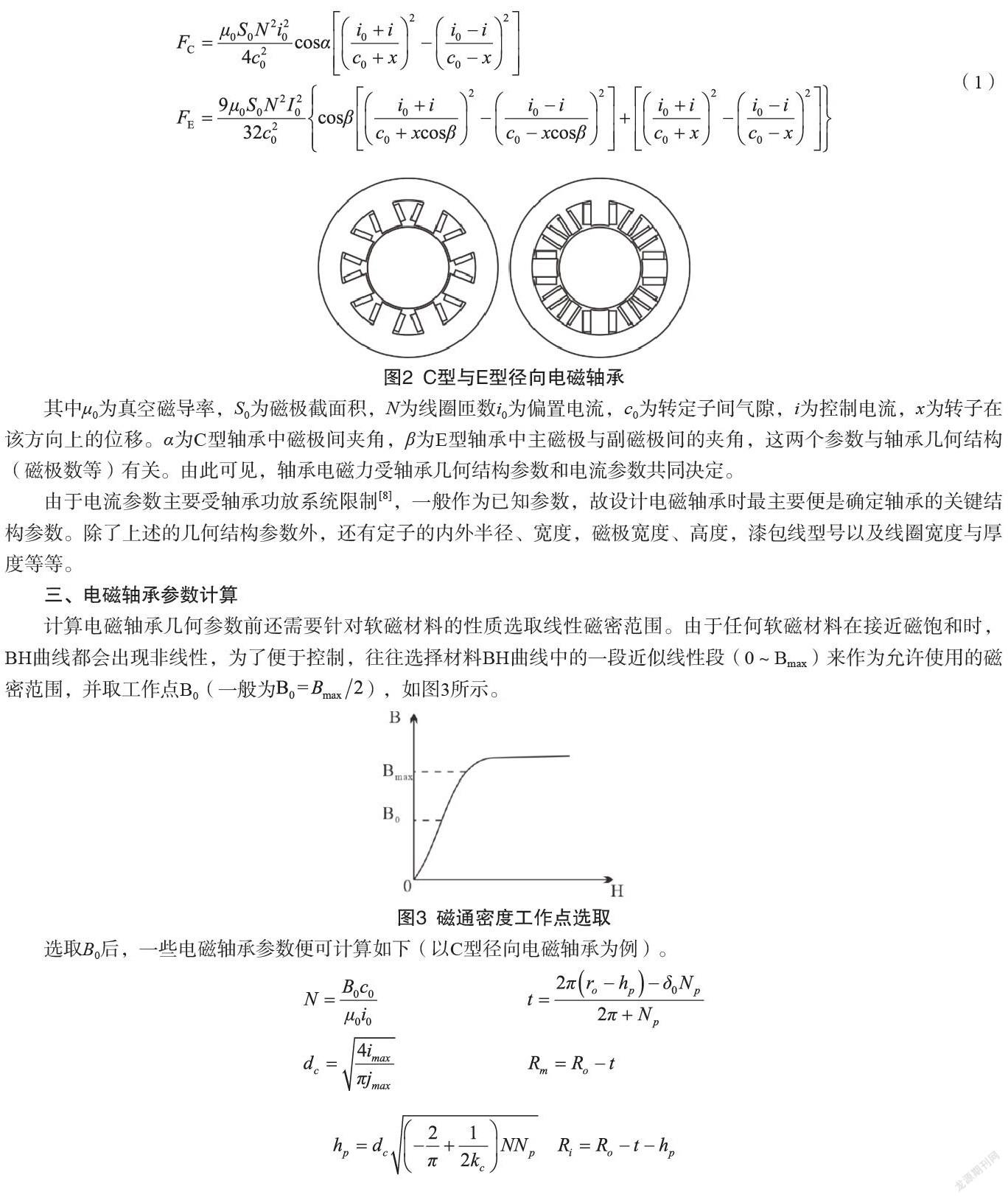
其中μ0为真空磁导率,S0为磁极截面积,N为线圈匝数i0为偏置电流,c0为转定子间气隙,i为控制电流,x为转子在该方向上的位移。α为C型轴承中磁极间夹角,β为E型轴承中主磁极与副磁极间的夹角,这两个参数与轴承几何结构(磁极数等)有关。由此可见,轴承电磁力受轴承几何结构参数和电流参数共同决定。
由于电流参数主要受轴承功放系统限制[8],一般作为已知参数,故设计电磁轴承时最主要便是确定轴承的关键结构参数。除了上述的几何结构参数外,还有定子的内外半径、宽度,磁极宽度、高度,漆包线型号以及线圈宽度与厚度等等。
三、电磁轴承参数计算
计算电磁轴承几何参数前还需要针对软磁材料的性质选取线性磁密范围。由于任何软磁材料在接近磁饱和时,BH曲线都会出现非线性,为了便于控制,往往选择材料BH曲线中的一段近似线性段(0~Bmax)来作为允许使用的磁密范围,并取工作点B0(一般为 ),如图3所示。
若式(4)成立,则表示线圈尺寸合格,完成线圈设计。
四、Comsol实现
(一)程序主要结构及实现
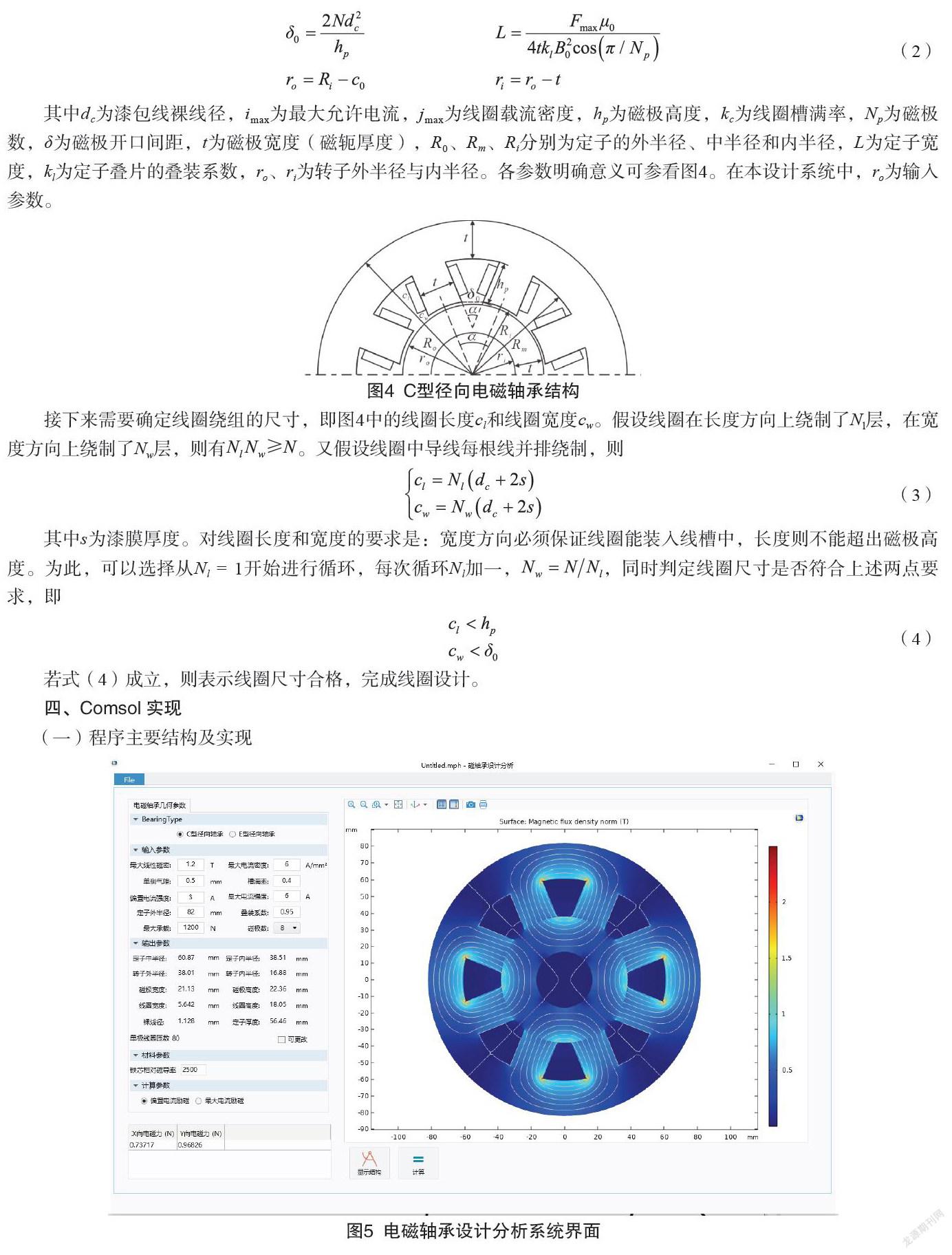
上述径向电磁轴承几何参数的计算过程可以借助Comsol的Application builder模塊,利用java语言实现自动化。该模块一方面可以利用java语言实现复杂的算法,另一方面又可以调用Comsol软件的api,实现由程序控制的自动化几何模型建模、模型设置、网格划分、求解和结果显示即输出过程。同时,该模块还提供基于Comsol的程序GUI实现,方面快捷地搭建出应用。本文所述的系统界面如图5所示。
1. Model对象
在Comsol中,Model对象存储了所有与分析计算相关的数据,拥有大量方法(Methods),可以实现包括几何建模、网格划分、求解模型、显示结果等,是Comsol最基本的对象。
2. Geometry对象
Geometry是Model对象的子集,表示几何模型,并包含多种生成几何模型的方法。例如,在模型中有一个名为geom1的Geometry对象,需要在[0.5, 0.5]的位置建立一个边长为0.9、名为sq的正方形,相关代码为
model.geom("geom1").create("sq", "Square");
with(model.geom("geom1").feature("sq"));
set("pos", new String[]{"0.5", "0.5"});
set("size", "0.9");
endwith();
在本文所述的系统中,利用Geometry的各种方法,可以依据计算的参数建立电磁轴承的几何模型。
3. Physics对象
Physics对象包含了仿真对象的所有属性,对于本文所述系统,由于用到Comsol的电磁模块,故Physics对象将包括模型的电磁学属性设置,如励磁线圈设置、电磁学模型选择等。例如,在模型中利用前述的“geom1”几何模型,建立一个名为“magfield”电磁场的Physics对象,相关代码为
Physics mag;
mag=model.physics().create(“magfield”,”InductionCurrents”,”geom1”);
在模型中建立线圈并设置参数的相关代码为
PhysicsFeature cl;
cl=mag.feature().create(“coil1”,”Coil”,2); //建立线圈对象
with(cl);
set("ConductorModel", "Multi"); //设置类型为多匝线圈
set("coilGroup", true); //建立线圈组
set("Coil", 3); //设置线圈电流(3A)
set("N", 80); //设置线圈匝数(80)
endwith();
Material对象
该对象包含了用于仿真的材料属性。比如若某材料需要采用的BH曲线数据在Comsol中并未提供,则可通过Material对象输入进模型中。
4. Mesh对象
该对象存储模型网格,包含了网格生成、修改等多种方法。
5. Study对象
Study对象用于设置求解类型和求解器参数。
6. Result对象
该对象存储计算数据,并提供了计算结果显示和输出等多种方法。
(二)设计计算实例
某C型电磁轴承需要的输入参数如表1所示。经本文所述软件计算后,获得的参数如表2所示。软件利用Comsol提供的API建立的轴承几何结构如图6(a)所示,再利用mesh方法获得的网格模型如图6(b)所示。
1. 磁场分布特性
经软件计算的偏置电流励磁时和最大电流励磁的磁场分布如图7所示。可见,经软件计算和自动完成建模及分析过程后得到的电磁轴承磁场分布是合理。
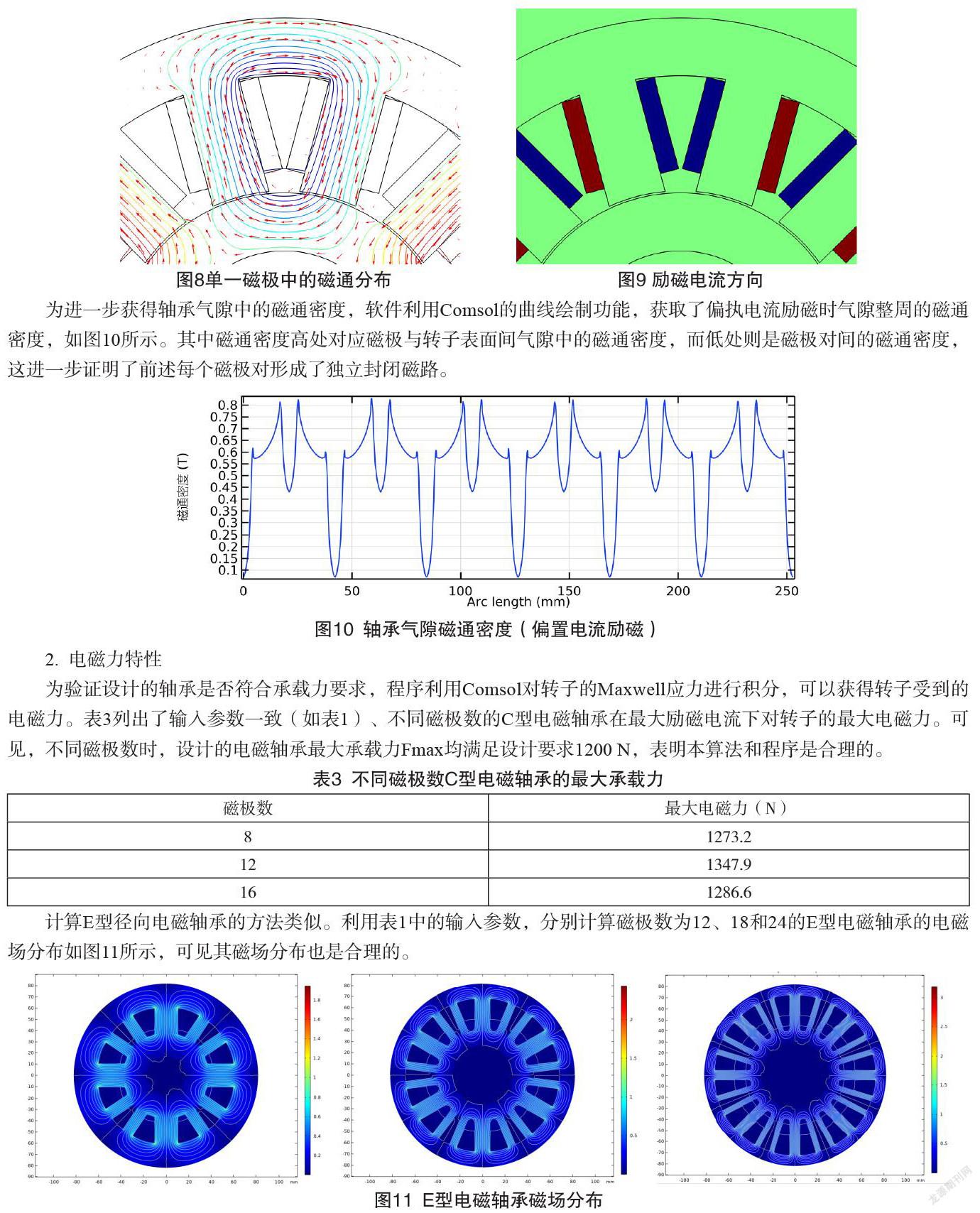
图8显示了轴承一对磁极中的磁通分布。图9表示了该磁极对中线圈的电流方向(红色向外、蓝色向内),这种排布方向使得磁极对中的两个磁极的磁场方向刚好相反。可以看到,利用图9所示的励磁电流方向,每个磁极对、磁轭、气隙和转子间形成了封闭磁回路。这种每个磁极对形成封闭磁路的方式降低了磁极对间的磁场耦合(如图7所示)。
为进一步获得轴承气隙中的磁通密度,软件利用Comsol的曲线绘制功能,获取了偏执电流励磁时气隙整周的磁通密度,如图10所示。其中磁通密度高处对应磁极与转子表面间气隙中的磁通密度,而低处则是磁极对间的磁通密度,这进一步证明了前述每个磁极对形成了独立封闭磁路。
2. 电磁力特性
为验证设计的轴承是否符合承载力要求,程序利用Comsol对转子的Maxwell应力进行积分,可以获得转子受到的电磁力。表3列出了输入参数一致(如表1)、不同磁极数的C型电磁轴承在最大励磁电流下对转子的最大电磁力。可见,不同磁极数时,设计的电磁轴承最大承载力Fmax均满足设计要求1200N,表明本算法和程序是合理的。
计算E型径向电磁轴承的方法类似。利用表1中的输入参数,分别计算磁极数为12、18和24的E型电磁轴承的电磁场分布如图11所示,可见其磁场分布也是合理的。
五、结论
本文讨论了基于Comsol的径向电磁轴承设计分析系统的实现。通过将设计算法集成进Comsol软件中,可以有效地实现利用部分输入参数设计出不同磁极数的C型和E型径向轴承,并利用仿真验证轴承的电磁场分布、承载力等是否合理、是否满足要求。通过本系统,可极大地提高电磁轴承的设计效率,促进电磁轴承的工程应用。
参考文献
[1] KEJIAN J, CHANGSHENG Z, MING T. A Uniform Control Method for Imbalance Compensation and Automation Balancing in Active Magnetic Bearing-Rotor Systems[J/OL]. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(2): 021006. http://dynamicsystems.asmedigitalcollection.asme.org/article.aspx?articleid=1415226. DOI:10.1115/1.4005279.
[2] CHEN Q, LIU G, HAN B. Unbalance vibration suppression for AMBs system using adaptive notch filter[J/OL]. Mechanical Systems and Signal Processing, 2017, 93: 136–150. http://dx.doi.org/10.1016/j.ymssp.2017.02.009. DOI:10.1016/j.ymssp.2017.02.009.
[3] ZHANG Y. Active magnetic bearing system based on sliding mode control[J]. Modern Physics Letters B, 2017, 31(19–21): 1–5. DOI:10.1142/S0217984917400139.
[4] LI Q, WANG W, WEAVER B, BRAIN. Active rotordynamic stability control by use of a combined active magnetic bearing and hole pattern seal component for back-to-back centrifugal compressors[J/OL]. Mechanism and Machine Theory, 2018, 127: 1–12. https://doi.org/10.1016/j.mechmachtheory.2018.04.018. DOI:10.1016/j.mechmachtheory.2018.04.018.
[5] SCHWEIZER G, MASLEN E H. Magnetic Bearings Theory, Design, and Application to Rotating Machinery[M/OL]. MASLEN E H, SCHWEITZER G, 編//Spring. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009. http://link.springer.com/10.1007/978-3-642-00497-1. DOI:10.1007/978-3-642-00497-1.
[6] 王小虎,鄢光荣,胡瑶尧,唐瑞.Alford力和磁悬浮轴承对转子系统动力学特性的影响[J].振动与冲击, 2020,39(8):222-229.DOI:10.13465/j.cnki.jvs.2020.08.032.
[7] 占智军.主动电磁轴承的设计与分析[D].浙江大学, 2013.
[8] 张赓.磁力轴承用数字功率放大器的研究[D].武汉理工大学, 2013.
猜你喜欢
中国品牌(2020年11期)2020-12-23
孩子(2020年12期)2020-01-06
作文评点报·低幼版(2018年17期)2018-07-12
Coco薇(2017年5期)2017-06-05
电子技术与软件工程(2016年20期)2016-12-21
电脑知识与技术(2016年21期)2016-10-18
中国新通信(2016年16期)2016-10-18
Coco薇(2015年12期)2015-12-10
舒适广告(2008年9期)2008-09-22
中学英语之友·高二版(2008年2期)2008-04-08
