挖掘机自主挖掘轨迹规划方法研究
2021-11-02 08:21谢中东
南方农机 2021年20期
谢中东
(长安大学工程机械学院,陕西 西安 710064)
0 引言
在现代社会中,挖掘机是用来执行工业工程任务的重要设备,其主要使用领域是建筑、工业、运输、交通等。随着社会的发展,一些特殊环境也开始使用挖掘机作业,如深海挖掘、探索宇宙等。挖掘机在作业过程中往往都是重复且连续的作业,同时操作员对操作挖掘机的作业环境要求较为严格,而大部分作业环境会伴随着噪声、尘土和一些其他的因素的影响。因此,对于操作员的操作水平以及心理素质要求也越来越高。并且一些特殊的工作环境可能对操作员的身体产生危害,导致操作员无法直接进入。再者,培养熟练的操作员去完成高水平、高质量的作业任务需要耗费较多的时间和金钱。因此,国内外越来越多的学者开始关注挖掘机的智能化挖掘。同时,随着工业的不断发展,挖掘机智能化、自动化挖掘有了较好的发展条件。液压挖掘机是经济建设中最常用的工程机械之一,国内外学者针对挖掘机的机器人化进行了多方面的研究[1-2]。实现挖掘机自动化作业是非常必要的,因此,必须解决挖掘机的轨迹规划问题。朱世强等提出的七次样条曲线插值方法,能够避免振动问题,但计算复杂,效率比较低[3];Gao D等利用多项式插值方法在关节空间对机械臂进行轨迹规划,并通过ADAMS软件实现仿真验证[4];刘宇等以三次NURBS曲线插值关节位置,得到满足物理约束的时间、平滑性综合最优的轨迹曲线[5];管成等提出基于五次NURBS曲线的时间最优轨迹规划[6],通过权因子适时调整挖掘轨迹,但是NURBS曲线的求导计算式烦琐,编程复杂且求解效率低[7]。
本研究以某型挖掘机为研究对象,在关节空间对自主挖掘过程分别进行三次样条曲线和五段五次多项式插值,并对轨迹规划得出的曲线进行比较,以此得出相对性能更优的轨迹规划方法。
1 挖掘机的运动学分析
1.1 挖掘机工作装置D-H模型的建立
挖掘机工作装置包括动臂、臂和铲斗接头。为了实现自主操作,铲斗应与地面保持一定角度,以实现水平挖掘或自主开挖沟。当不考虑旋转时,工作装置的尖端轨迹由三个关节的运动组成,可以将其视为平面三杆操纵器。该机械手由四个连杆和三个旋转关节串联而成,固定在挖掘机器人的基座上。本研究采用组合运动方式进行了挖掘机的轨迹规划。动臂液压缸、斗杆液压缸和铲斗液压缸相互配合。挖掘动作由绕动臂的铰接点旋转的臂来驱动,并且动臂液压缸也被导引以控制运动轨迹。在挖掘机的轨迹规划中,根据机器人理论,将挖掘机的工作装置建立在D-H坐标系中,求得逆运动学的解,如图1(a)所示。其中,θ1、θ2、θ3、ζ分别为动臂关节变量、斗杆关节变量、铲斗关节变量以及铲斗尖端与地面夹角。挖掘机运动学模型,Matlab挖掘三关节仿真图,如图1(b)所示。

图1 挖掘机的挖掘三关节
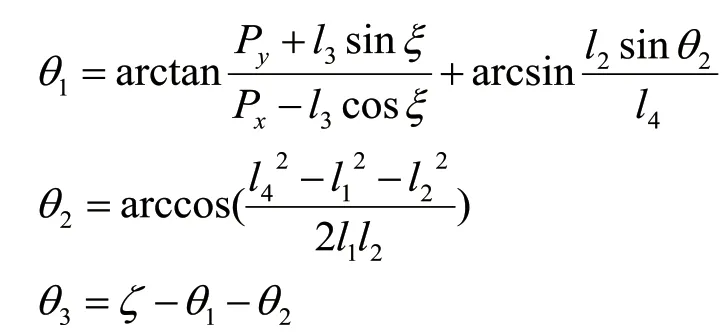
1.2 运动学的逆解
笔者研究了具有三个自由度的挖掘机,这是具有冗余自由度的机器人的重要基础模型之一。首先,根据D-H方法建立工作装置的运动学模型,并进行正向和逆向运动学分析。在正向运动学解决方案中,每个关节角度的工作装置和连杆的长度是已知的,并且铲斗尖端相对于基本坐标系的位置和姿势可以解决。在挖掘工作中,挖掘控制点在笛卡尔坐标系中描述,轨迹在关节空间中进行规划。因此,要实现这一过程,必须求得逆运动学的解,即将挖掘控制点的位姿坐标转换为关节空间中关节的转角。逆解的计算在轨迹规划过程中非常有意义。它包含自动控制端的变量,并为控制系统提供数据信息。然而,通常多个冗余机器人的运动学逆解相对困难的,逆运动学结果可能包含不确定数量的解。求解逆解的主要计算方法有三种,分别为解析法、迭代法、几何法。由于解析法在求解过程中需要进行矩阵逆乘运算,当所需要求逆解的机器人是多自由度时,此法得到逆解更加简单。而迭代法通过迭代收敛得到的唯一解有可能是错误的解,且其收敛速度难以控制。几何法适用于自由度较少、能够进行直观转换计算的情况。本研究中的挖掘机结构比较简单,自由度较少,因此,这里选取几何法求得其逆解。通过几何推导图1(a)得到的位置。其中,为O2的长度。
1.3 工作空间
为了确保铲斗尖端的预期目标工作空间完全包围实际的运动空间,对挖掘机的工作空间进行了分析。分析挖掘机的工作空间范围对于挖掘机作业任务设置和路径规划非常重要。铲斗尖端的实际运动空间是用蒙特卡洛方法绘制的[8]。动臂,斗杆和铲斗的三个关节角包含大量随机样本。铲斗尖端的位置和姿势由正向运动学推导。然后,调用Matlab中的描点函数scatter3(x,y,z)描绘出挖掘机随机关节变量所对应的空间位姿点的位置集合。所有点位置的集合就是挖掘机工作空间的蒙特卡洛分布图。如图2所示为挖掘机的工作空间。根据挖掘机工作区图,可以方便地在铲斗可及范围内选择目标位置,提高挖掘机机器人的工作效率。通常,当使用蒙特卡洛方法分析挖掘机的工作空间时,给出的随机点越多,结果越接近真实。但是,由于一般工程实践中有大量计算,如果将挖掘机的工作空间解决在一定的误差范围内,这是可以接受的。
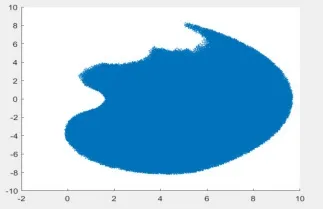
图2 挖掘机的工作空间图
2 关节空间轨迹规划
2.1 三次样条曲线规划
样条曲线是指用一条光滑曲线插值或者逼近一组离散有序数据点,最终形成的具有一定性质的满足条件的曲线,具有可微性、凸包性质,而且生成的运动轨迹曲线具有速度、加速度连续性。三次样条曲线的表达式如下:
对三次样条曲线函数求一阶导数和二阶导数,可以得到各关节的速度和加速度,如下:

初始点和终止点需满足的条件:

根据上述公式,将所有控制点的动臂、斗杆和铲斗转角值代入轨迹多项式、角速度和角加速度方程,以此得到各个多项式的系数。通过Matlab仿真获得每个关节的关节角度、角速度和角加速度曲线,如图3所示。

图3 动臂、斗杆、铲斗三次样条曲线运动仿真轨迹
2.2 五段五次多项式曲线规划
由于高阶多项式及其一阶和二阶导数具有平滑且连续的特性,路径点过多的轨迹规划一般采用多项式进行拟合,多项式的一般表达式为:

式中:M(t)为随着时间t变化的关节变量;n为路径点数。
本研究中n=6,则挖掘机各关节点的多项式为:

通过对多项式分别求一阶、二阶导数,得到各关节的速度、加速度公式为:

初始点和终止点需满足的条件:
根据上述公式,将所有控制点的动臂、斗杆和铲斗转角值代入轨迹多项式、角速度和角加速度方程,以此得到各个多项式的系数。通过Matlab仿真获得每个关节的关节角度、角速度和角加速度曲线,如图4所示。
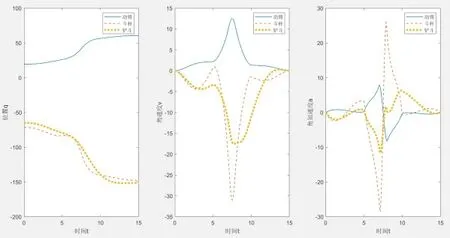
图4 动臂、斗杆、铲斗五段五次多项式运动仿真轨迹
3 结论
本研究结合挖掘机实际工作参数,在关节空间对挖掘机工作装置自主作业过程分别采用三次样条曲线、五段五次多项式进行轨迹规划,通过对规划结果的动力学特性指标进行比较,得出五段五次多项式效果相较于三次样条曲线更好,五段五次多项式轨迹规划得到的各个关节的角加速度曲线更为平滑。因此,五段五次多项式规划挖掘机的运动轨迹,使工作装置各个关节动作更加平缓且所受的冲击也更小。三次样条曲线轨迹规划的角加速度曲线变化更大,其各个关节所受的冲击也更大。而在实际作业中,延长各组件的使用寿命是非常重要的一项准则。因此,选用五段五次多项式进行轨迹规划,能使其受到更小的冲击,延长挖掘机各组件的使用寿命,也便于挖掘机更好地进行实际作业。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
安徽师范大学学报(自然科学版)(2022年2期)2022-05-30
学生天地(2020年16期)2020-08-25
电子制作(2019年15期)2019-08-27
数码世界(2018年11期)2018-12-13
软件(2017年6期)2017-09-23
冰雪运动(2016年5期)2016-04-16
有色金属设计(2015年2期)2015-02-28
国外科技新书评介(2014年11期)2014-12-08
筑路机械与施工机械化(2014年10期)2014-03-01